補盲lidar設計:機械式和半固態這里不再討論,這里主要針對全固態補盲Lidar進行討論
1、系統架構設計
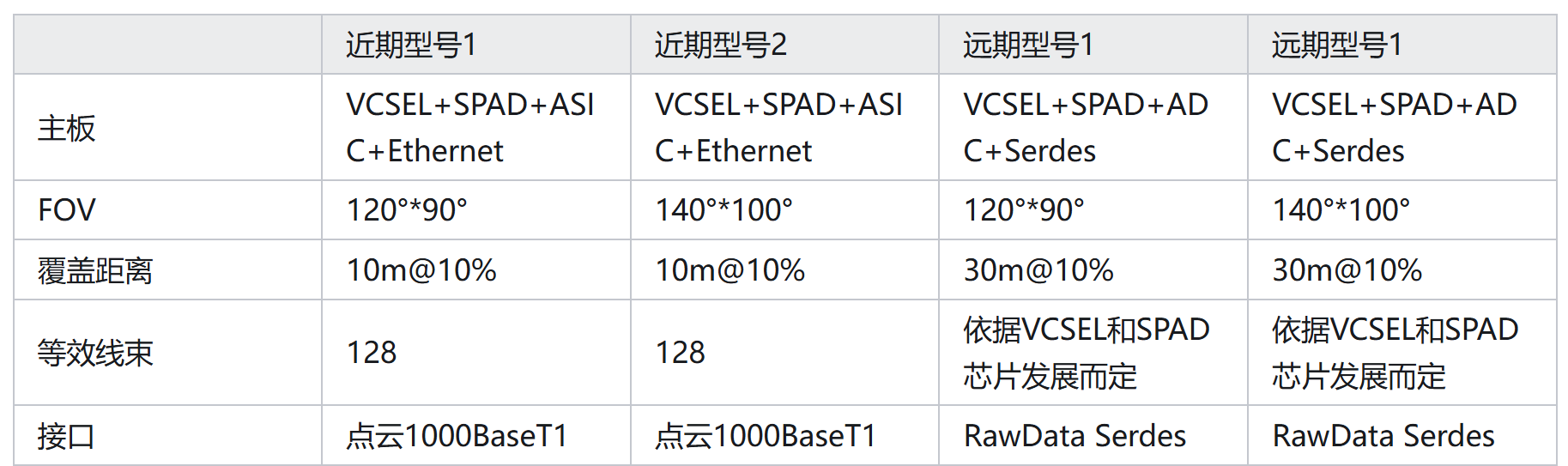
采用Flash方案, 設計目標10m@10%,實現30m距離的點云覆蓋,同時可以驗證不同FOV鏡頭的設計下,組合為多款產品。
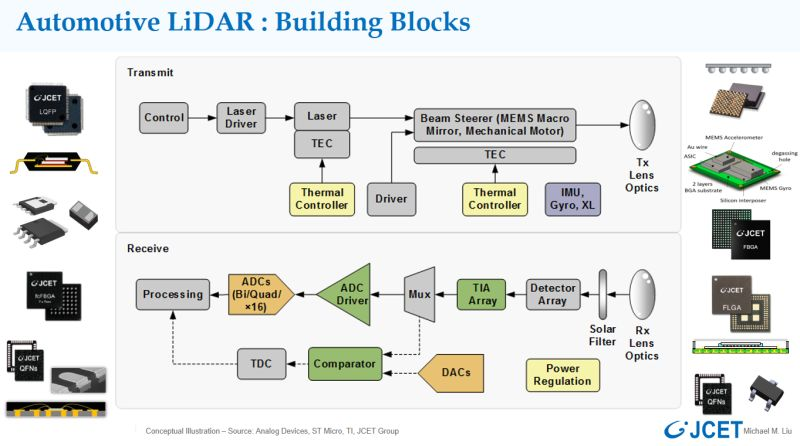
具體架構參考設計如下
以上工作可以有基于如下信息展開:
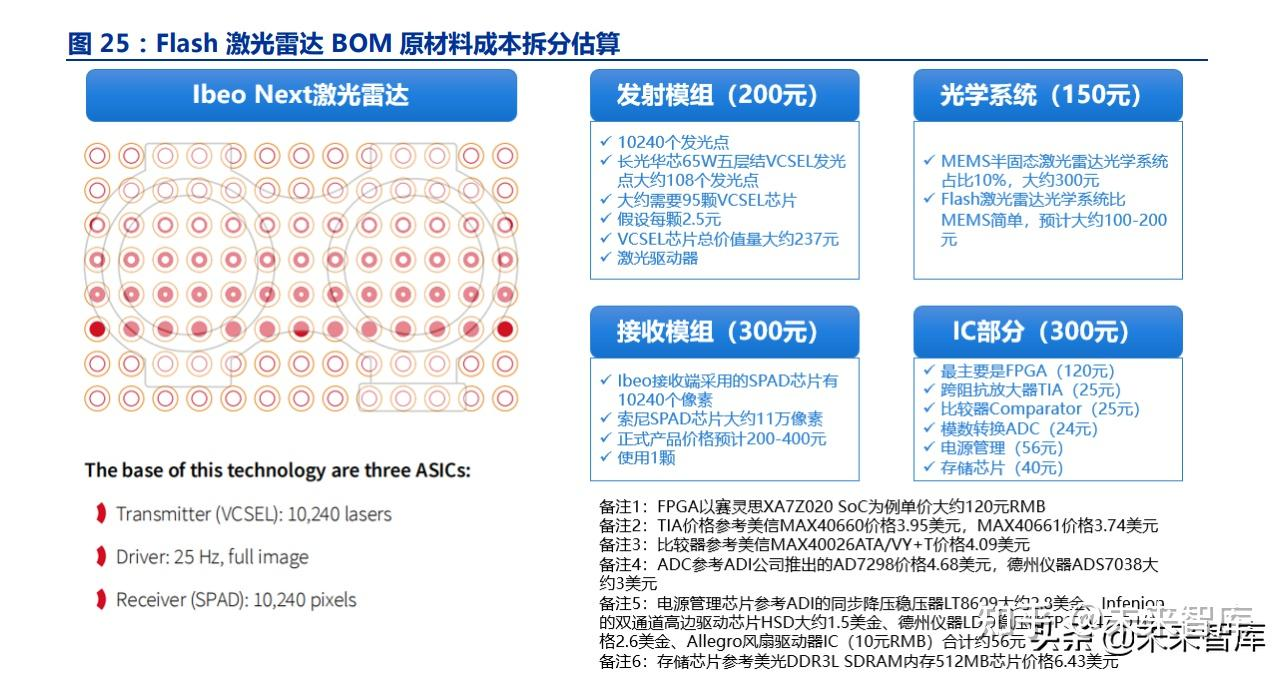
BOM成本參考如下,但是該成本參考比較老,為2021年左右的成本報價,另外該設計比較激進,感知距離為300m,核心器件方面采用了來自AMS的VCSEL面陣陣列以及Onsemi的SPAD面陣;
Lidar的光學鏡頭部件廠家有:舜宇光學、藍特光學、福晶科技、永新光學、福特科光電、水晶光電、富蘭光學、炬光科技、騰景科技等,炬光科技進行了發射模組+光學元器件雙布局。
VCSEL芯片,國外主要是 Lumentum 和 AMS,國內主要是長光華芯、縱慧芯光、檸檬光子(HCSEL)。;
SPAD芯片,國外主要是索尼、佳能,國內主要是阜時科技、宇稱電子、飛芯電子、靈明光子、芯視界、奧比中光;其中阜時科技剛在極氪X9的補盲Lidar獲得定點;奧比中光預計明年發布SPAD并搭載至自研Flash激光雷達中。
Lidar端的信號處理這塊主要是FPGA(賽靈思)。另外LeddarTech:核心產品是 Flash 激光雷達信號處理 SoC 和信號處理軟件,定位更偏 Tier2,其次是 Tier1,核心在于其自研的 Flash 激光雷達數據采集和信號處理 SoC(LeddarCore)及信號處理算法(LeddarSP);中國臺灣的公司瀚昱能源也和 LeddarTech 定位相同,于 2018 年推出了 Flash 激光雷達 SoC 芯片 HYCA2 的首款 A樣。LeddarTech 分別于2018 年和2019 年推出LCA2 和LCA3 兩款Flash激光雷達 SoC,其中 LCA2 主要用于中短距離探測、LCA3 主要用于中長距離探測。公司在 2019 年 9 月發布基于 LCA2 的 Flash 激光雷達 Leddar Pixell。
另外Ouste號稱是第一家將高性能SPAD和VCSEL方案商業化的公司,其VCSEL和SPAD以及SOC均為定制開發;
Xenomatix提供兩款Flash版Lidar,分別為近距和遠距。
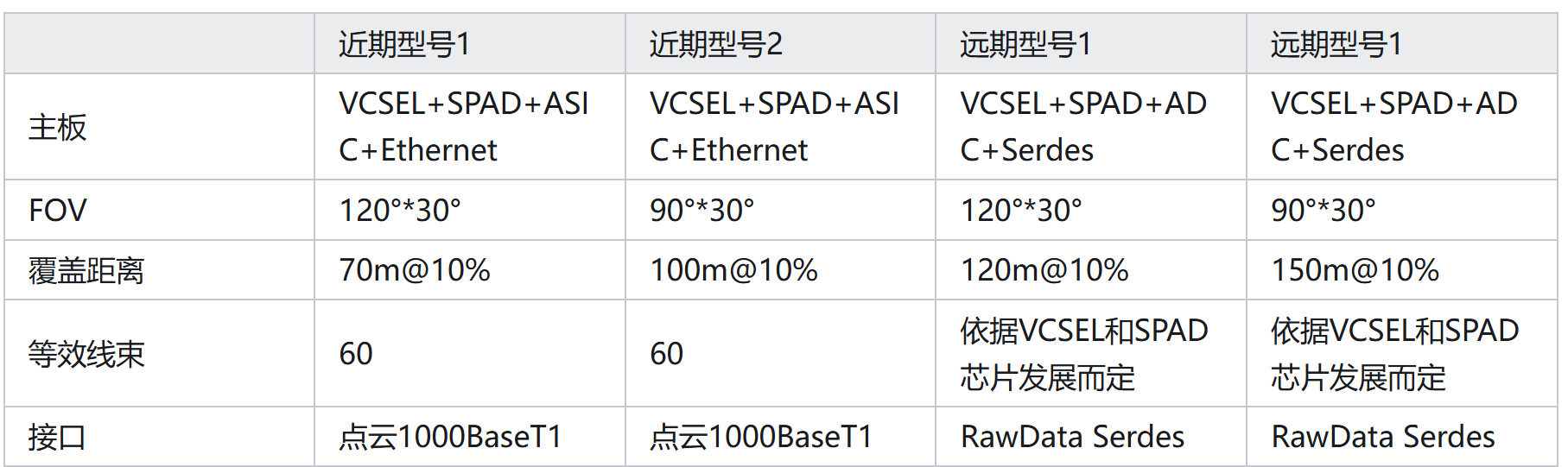
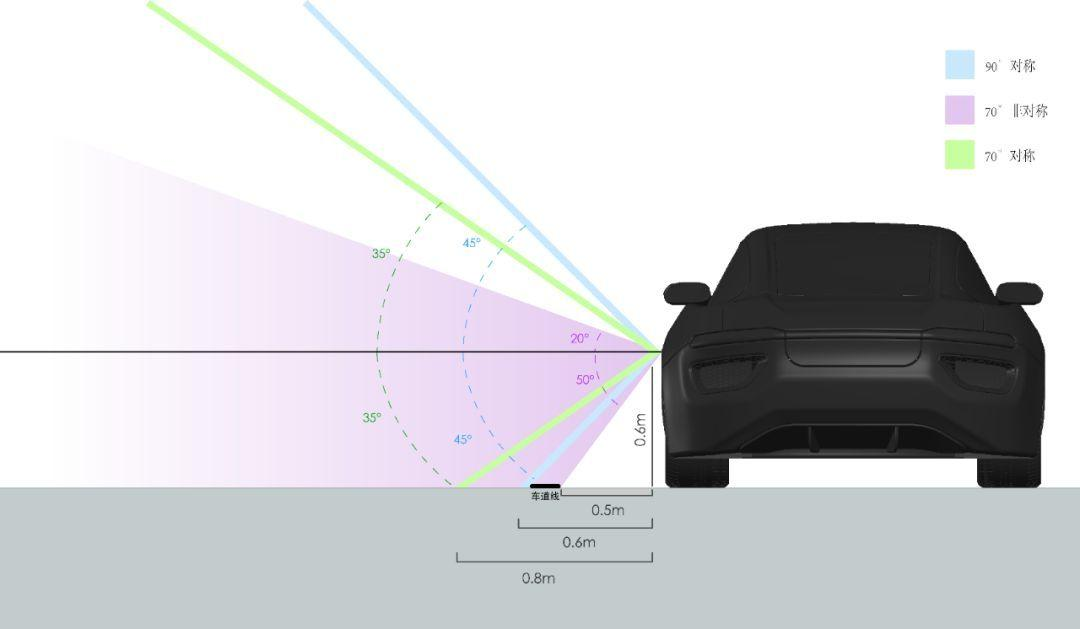
2、補盲Lidar技術指標設計

以上Lidar的水平FOV和垂直FOV都會依據具體的應用場景以及車身布置位置進行調整,該調整通過Lidar的Lens進行設計配置。 速度和速度分辨率,這兩個指標需要通過FMCW技術完成,如果是常規的TOF技術,速度是通過Kalman濾波進行估算(不在Lidar端完成,在域控端完成),不是直接測量值。
3、Lens設計:
Lens主要是Lidar方提出Lens的設計要求,具體設計Lens供應商負責;
Lens作為Lidar部件,最終組合裝配以及Lidar性能測試由Lidar方負責。
4、主板以及收發板設計:
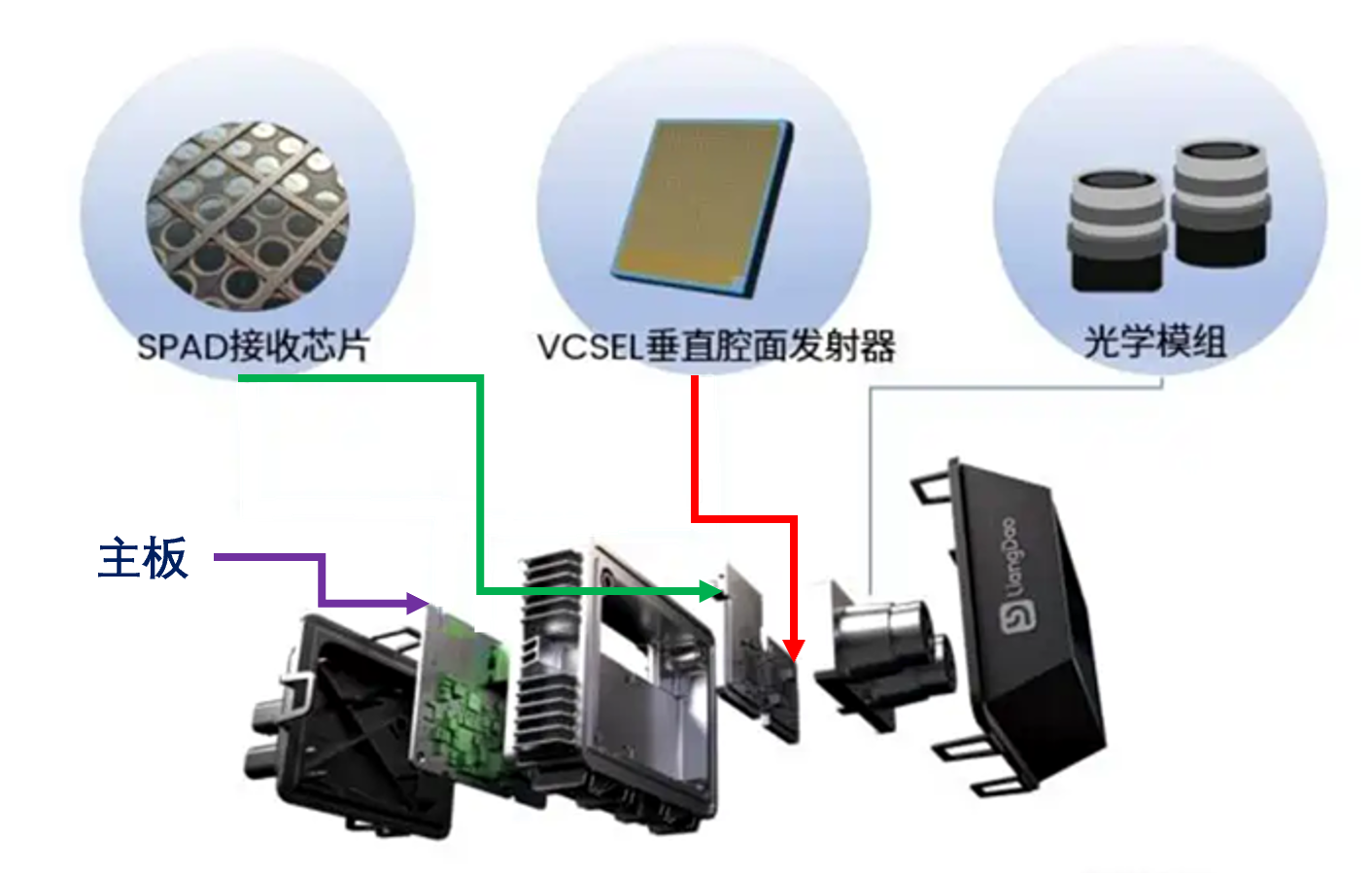
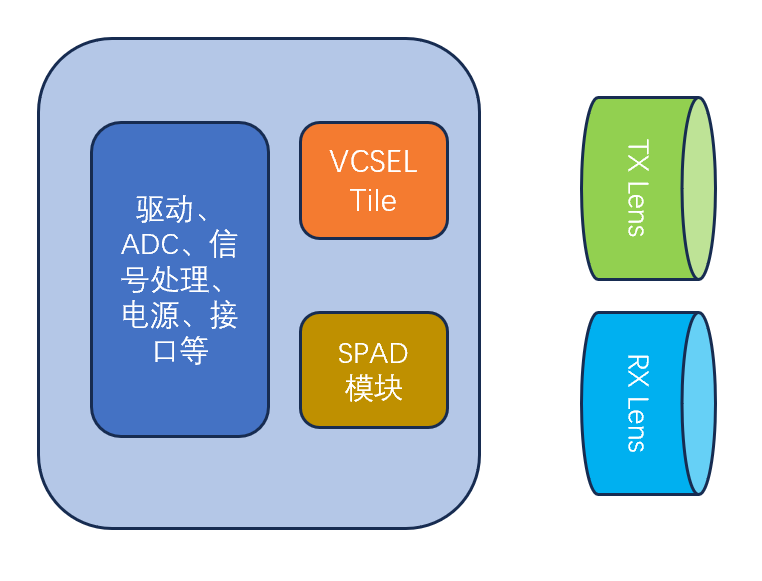
參見圖2,主板上主要包括
驅動控制以及信號采集處理板;、
VCSEL發射陣列板;
SPAD接收板;
以上三塊板是單板設計還是分板設計需要討論,從圖1可以看到,里面涉及到模塊散熱,需要具體討論。
5、數據接口設計
如果不在Lidar端進行信號處理,則數據(Raw Data)輸出端口采用CSI2接口,后續接Serdes芯片,直接輸出到域控端處理;
若果在Lidar端進行信號處理,則數據(Point Cloud)輸出端采用1000BaseT1或者100BaseT1;
6、后端算法設計
Lidar Flash版:無速度信息,主要基于3D稀疏陣的特征提取,最終進行語義分割,從而類似于視覺感知方案,進行目標識別與跟蹤,以及環境感知刻畫,后續送給不同Head模塊。需要進行算法有效作用距離的實驗,包括對汽車、VRU以及小目標等。
在目標目標跟蹤以及環境刻畫完成輸出,會分別和Camera/Radar的動態目標以及靜態環境進行融合;
L2以上需要感知融合鏈路的多樣性,盡量減少共因失效;
融合方案上看前融合、中融合、后融合對原始信息的保留量依次遞減,但是對噪聲干擾的濾除也是依次遞增,所以需要最大化最優化利用Lidar輸出數據進行處理;
單純的Lidar傳感器硬件層面是這些數據融合的共因來源,硬件上無法避免共因失效,但是算法層面上,前融合、中融合、后融合的交叉使用,可以提升環境感知算法和目標跟蹤算法的置信度;
7、Flash Lidar整體技術路線圖
具體如下: 長距Lidar(Flash版)、短距Lidar(Flash版)。其中長距Lidar(Flash版)需要依據收發芯片的迭代演進,如果收發芯片有比較大的提升,可以考慮進行長距Lidar(Flash版)相關設計。
目前主流的長距Lidar技術指標為FOV120°,探測距離150m @10%,但是該產品是基于半固態Lidar方案(VCSEL+SiPM/SPAD+一維轉鏡),該方案的技術指標應該是以禾賽AT128為藍本。
如果長距Lidar(Flash版)可以參考上述進行相關技術路線圖整理。
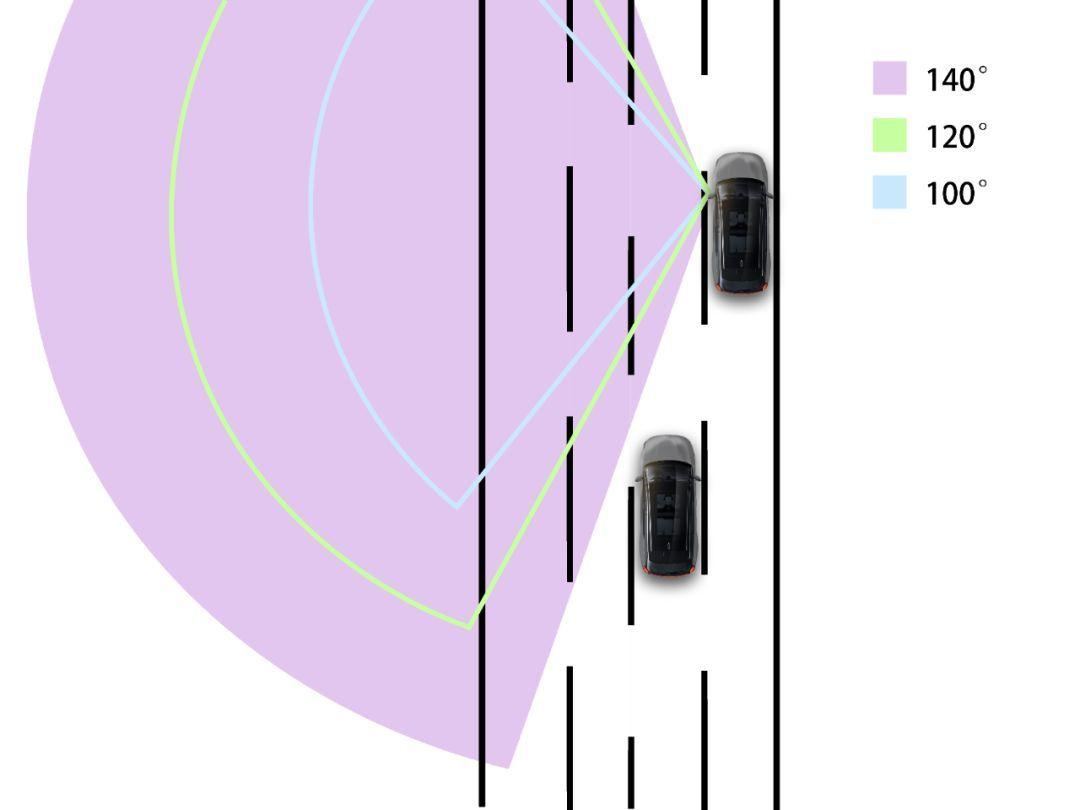
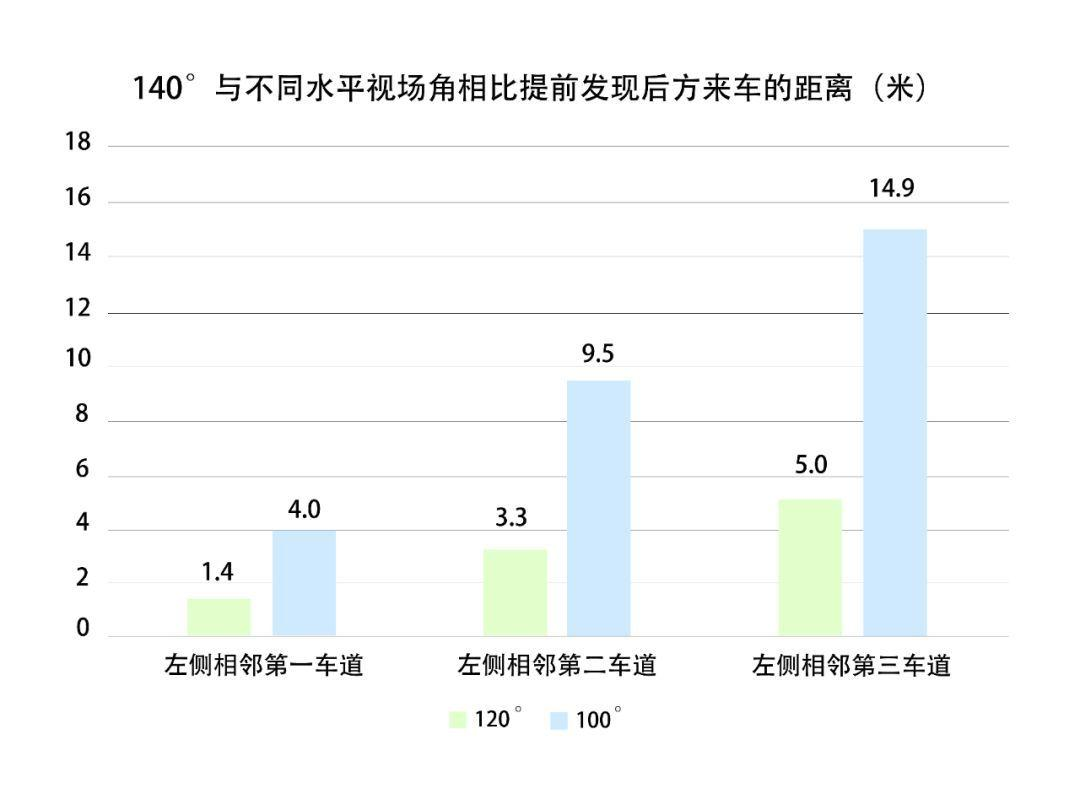
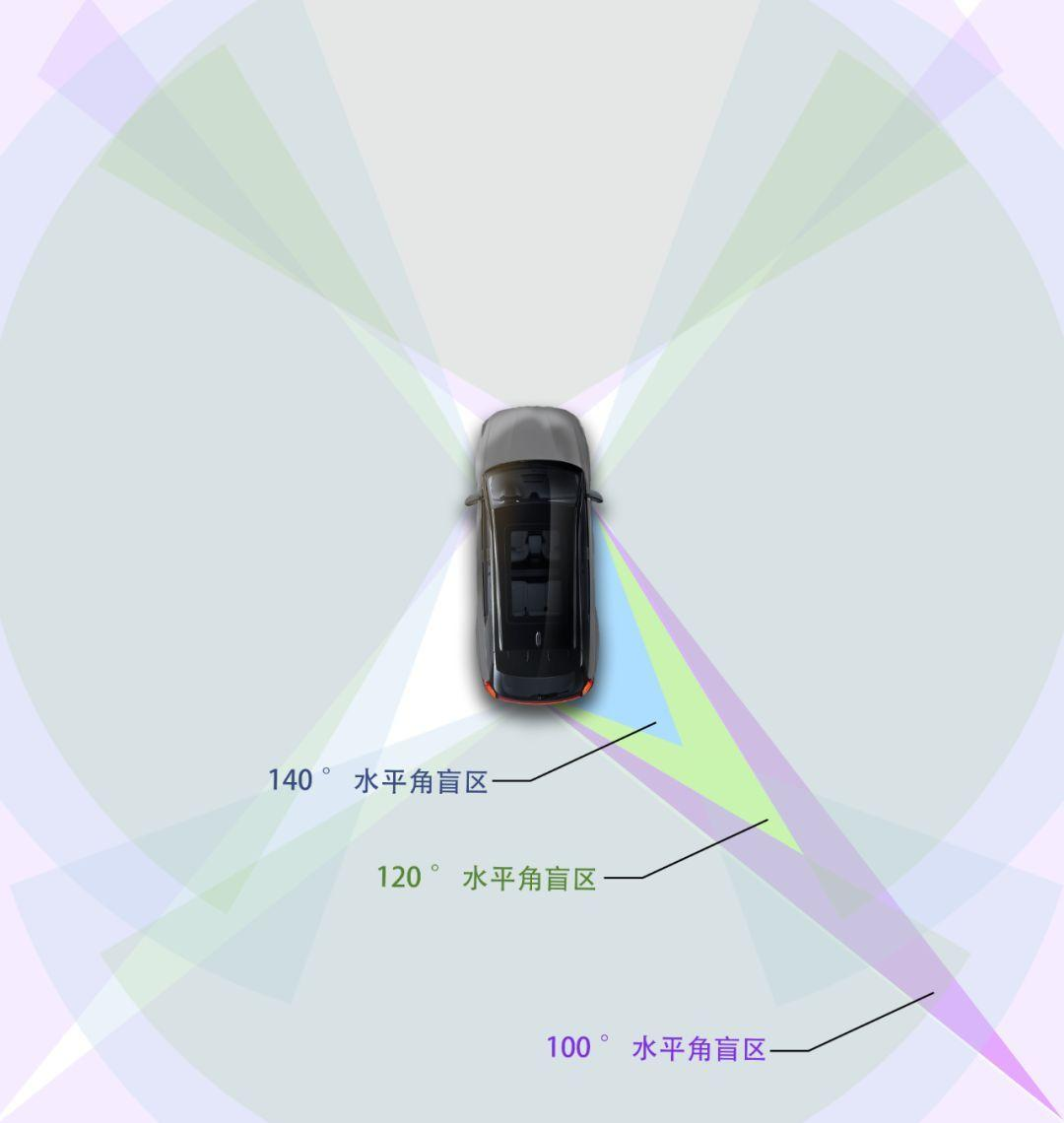
如果短距補盲Lidar(Flash版),其探測距離一般會控制在10m@10%,或者更高,但是其FOV一般會做的比較大,甚至HFOV達到了140°以上(VFOV也會在90°左右),以確保補盲效果。
8、整體技術可行性和風險分析
從以上1-7點的分析可以看到,技術具有可行性,行業在不斷迭代,逐步走向成熟,后續固態Lidar的市場將迎來成熟期或者說是爆發期;
從行業發展,Flash版相應的芯片和模塊推出,并且也有相關方案的Lidar推出,這些都在不斷迭代成熟中;
同時全固態Lidar的發展方向是行業的一個共識;
域控算力集中化,Lidar傳感器低成本化,是整體行業趨勢;
接口后續從車載以太網向高速Serdes網絡迭代;
風險如下
固態Lidar所存在的技術瓶頸,Flash主要是面光源(MEMS 等掃描方式為點光源),因此能量相比點光源較為發散,難以到達遠距離探測。影響Flash激光雷達性能的部件主要是發射模塊的垂直腔面 發射激光(VCSEL)及接收模塊中的單光子雪崩二極管(SPAD)。VCSEL方面,目前商用VCSEL發射功率不斷提升,同時VCSEL陣列實現相同峰值功率下對車輛前方更遠距離的探測。SPAD 方面,其發展目前同樣沿著摩爾定律式的性能曲線移動,隨著SPAD的快速發展FLASH 激光雷達有望率先成為商用于中距離探測的固態式激光雷達。
成本問題,從成本構成看,收發模組占據著分立式激光雷達60%的成本,人工調試占據25%的成本,機械、控制模組等其它零部件僅占據15%的成本;對于半固態激光雷達,收發器件(激光器、探測器)及芯片占據70%以上的成本,而光學等其他部件占比不足30%。后續切換到全固態Lidar后,機械結構成本去除,人工調成成本幾乎可以忽略,但是全固態Lidar初期,收發芯片成本會高于半固體Lidar,這個需要量產規模來促使收發芯片成本的不斷降低,另外可以通過收發芯片模塊的通用化涉及,以及更換收發Lens來適配各種應用需求,進一步促使全固態Lidar成本的降低。








)
)



)

)



)