一、工作模式 ?
無人機探測器通過多模式協同實現全流程防御閉環: ?
1. 主動掃描模式 ?
雷達主動探測:發射電磁波(如Ka/Ku波段),通過回波時差與多普勒頻移計算目標距離、速度及航向,適用于廣域掃描(360°覆蓋)。 ?
激光測距輔助:與光電系統聯動,提升定位精度(誤差≤0.3厘米)。 ?
2. 被動偵聽模式 ?
射頻信號嗅探:監測2.4GHz/5.8GHz等通信頻段,識別無人機遙控鏈路特征,定位操控者位置。 ?
聲紋采集:捕捉螺旋槳噪聲頻譜(50Hz–20kHz),匹配聲學數據庫實現無源探測。 ?
3. 智能響應模式 ?
分級反制策略:初級警告(無線電驅離)→ 中級干擾(GPS欺騙)→ 高級毀傷(激光熔毀),響應時間<5秒。 ?
二、技術要點 ?
1. 多傳感器融合 ?
數據協同:雷達(遠距廣域)+ 光電(視覺確認)+ 射頻(信號定位)+ 紅外(夜間增強),通過卡爾曼濾波與AI算法降低虛警率。 ?
組網定位:多節點三角測量實現三維定位(水平精度≤3°,俯仰精度≤5°)。 ?
2. 智能識別算法 ?
微多普勒分析:識別旋翼旋轉特征,區分無人機與鳥類(準確率>90%)。 ?
深度學習模型:CNN分類可見光/紅外圖像,GRU/LSTM處理時序信號(如聲紋)。 ?
3. 抗干擾設計 ?
頻率捷變技術:動態跳頻規避干擾(如Ku波段)。 ?
窄帶定向干擾:精準壓制目標頻段,避免誤傷合法通信。 ?
三、探測方式 ?
按技術原理分為四類主流方式: ?
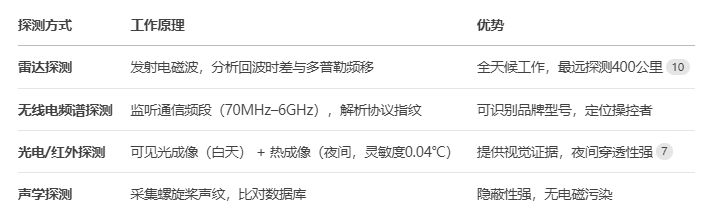
注:現代系統需集成≥2種技術以應對復雜場景,如“雷達+光電”組合可兼顧遠距探測與視覺驗證。
四、技術難點 ?
1. 復雜環境適應性 ?
電磁干擾:城市多徑效應降低定位精度,需空時自適應處理(STAP)抑制雜波。 ?
氣象影響:雨霧衰減雷達信號,紅外易受日光干擾,需多源數據互補校正。 ?
2. 靜默無人機探測 ?
非信號目標:無射頻發射的自主飛行無人機需依賴雷達微動特征識別或高分辨率紅外熱成像(如Skylark ARIES系統突破)。 ?
3. 多目標處理瓶頸 ?
同時追蹤>150個目標時,算力需求劇增,需邊緣計算本地化處理(響應≤5秒)。 ?
4. 超低空盲區優化 ?
地面雜波干擾雷達近地探測,需優化脈沖壓縮技術與俯仰掃描范圍(-20°~90°)。 ?
五、模塊要點 ?
探測器由四大核心模塊構成: ?


)
-大模型推理部署(分布式推理與量化部署)-大模型評估測試(OpenCompass))






及線程(1))


)
—條件結構)

)
)



)