IPM圖像投影拼接技術詳解
IPM(逆透視映射)圖像投影拼接技術是一種在計算機視覺中廣泛應用的圖像處理方法,主要用于將多個透視視圖的圖像轉換為鳥瞰視圖并拼接成一個無縫的大場景圖像。該技術特別適用于自動駕駛、機器人導航和監控系統等領域,因為它能消除透視畸變,提供更直觀的環境表示。下面我將逐步詳細解釋其原理、數學基礎、實現步驟和相關應用。
1. 技術概述
- IPM(逆透視映射):這是一種將透視圖像(如從相機拍攝的視圖)轉換為鳥瞰視圖(俯視圖)的過程。透視圖像中的物體因距離而顯得大小不一,IPM通過數學模型校正這種畸變,使圖像看起來像從正上方拍攝。
- 圖像拼接:這是將多個重疊圖像對齊并融合成一個寬視角圖像的技術。拼接過程涉及特征匹配、圖像變換和融合。
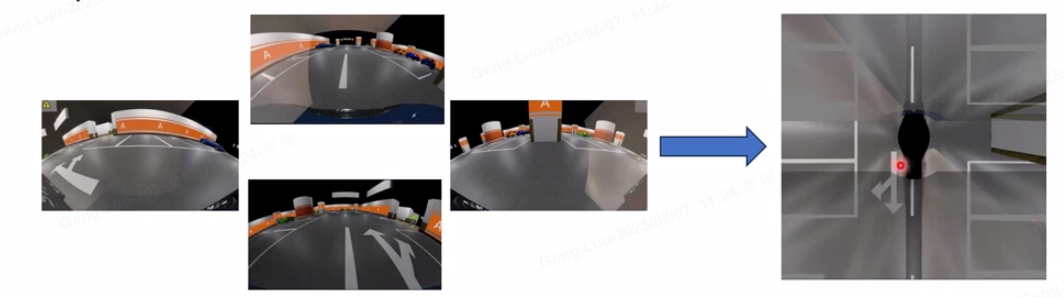
- 結合IPM與拼接:首先,對每個輸入圖像應用IPM轉換為鳥瞰視圖;然后,將轉換后的圖像拼接成一個完整的鳥瞰圖。這能有效處理透視變化,提升拼接精度。
2. 核心原理
-
IPM原理:透視圖像由相機模型產生,其中3D點投影到2D圖像平面。IPM通過逆變換將2D圖像點映射回3D世界坐標(假設地面平坦)。關鍵是用單應矩陣(homography matrix)描述變換。
- 透視投影公式:給定一個3D點P=(X,Y,Z)P = (X, Y, Z)P=(X,Y,Z),其投影到圖像平面點p=(x,y)p = (x, y)p=(x,y)可表示為:
p=K[Rt]P p = K \begin{bmatrix} R & t \end{bmatrix} P p=K[R?t?]P
其中,KKK是相機內參矩陣,RRR和ttt是旋轉和平移矩陣。 - IPM逆變換:假設地面為Z=0Z=0Z=0平面,則IPM將圖像點ppp映射到鳥瞰點u=(u,v)u = (u, v)u=(u,v):
u=H?1p u = H^{-1} p u=H?1p
這里,HHH是單應矩陣,H?1H^{-1}H?1是其逆矩陣。單應矩陣HHH可通過相機標定或特征點估計。
- 透視投影公式:給定一個3D點P=(X,Y,Z)P = (X, Y, Z)P=(X,Y,Z),其投影到圖像平面點p=(x,y)p = (x, y)p=(x,y)可表示為:
-
拼接原理:拼接涉及多個IPM轉換后的圖像。使用特征檢測(如SIFT或ORB)找到圖像間的匹配點,然后估計變換矩陣對齊圖像。最后,通過融合算法(如加權平均或泊松融合)消除接縫。
3. 數學基礎
-
單應矩陣估計:單應矩陣HHH是一個3×3矩陣,表示兩個平面間的投影變換。給定匹配點對(pi,ui)(p_i, u_i)(pi?,ui?),其中pip_ipi?是原始圖像點,uiu_iui?是鳥瞰點,HHH可通過最小二乘法求解:
ui=Hpi u_i = H p_i ui?=Hpi?
寫成齊次坐標形式:
[uivi1]=H[xiyi1] \begin{bmatrix} u_i \\ v_i \\ 1 \end{bmatrix} = H \begin{bmatrix} x_i \\ y_i \\ 1 \end{bmatrix} ?ui?vi?1??=H?xi?yi?1??
求解HHH需至少4對匹配點,使用SVD分解優化。 -
IPM變換公式:對于圖像中的每個點p=(x,y)p = (x, y)p=(x,y),IPM映射為:
u=H11x+H12y+H13H31x+H32y+H33,v=H21x+H22y+H23H31x+H32y+H33 u = \frac{H_{11}x + H_{12}y + H_{13}}{H_{31}x + H_{32}y + H_{33}}, \quad v = \frac{H_{21}x + H_{22}y + H_{23}}{H_{31}x + H_{32}y + H_{33}} u=H31?x+H32?y+H33?H11?x+H12?y+H13??,v=H31?x+H32?y+H33?H21?x+H22?y+H23??
這里,HijH_{ij}Hij?是單應矩陣HHH的元素。 -
拼接變換:拼接時,使用仿射或投影變換對齊圖像。例如,對兩幅圖像I1I_1I1?和I2I_2I2?,估計變換矩陣TTT:
I2′=TI2 I_2' = T I_2 I2′?=TI2?
其中TTT由匹配點計算。融合后,輸出圖像IstitchedI_{\text{stitched}}Istitched?通過像素加權實現無縫過渡。
4. 實現步驟
IPM圖像投影拼接的算法流程如下(以兩個圖像拼接為例):
- 輸入處理:獲取多個重疊的透視圖像(如車載相機序列)。
- IPM轉換:
- 估計單應矩陣HHH:使用相機內參或手動標定地面點。
- 應用IPM:對每個圖像執行逆透視映射,生成鳥瞰視圖圖像。
- 特征匹配:
- 檢測特征點:使用SIFT或ORB算法提取關鍵點和描述符。
- 匹配點對:通過距離度量(如歐氏距離)找到圖像間的對應點。
- 圖像對齊:
- 估計變換矩陣TTT:基于匹配點,求解變換矩陣(如使用RANSAC算法去除誤匹配)。
- 變換圖像:將第二幅圖像變換到第一幅圖像的坐標系。
- 融合與輸出:
- 融合圖像:使用加權平均或高級融合技術(如拉普拉斯金字塔)拼接圖像,消除邊界。
- 輸出:生成最終的鳥瞰拼接圖。
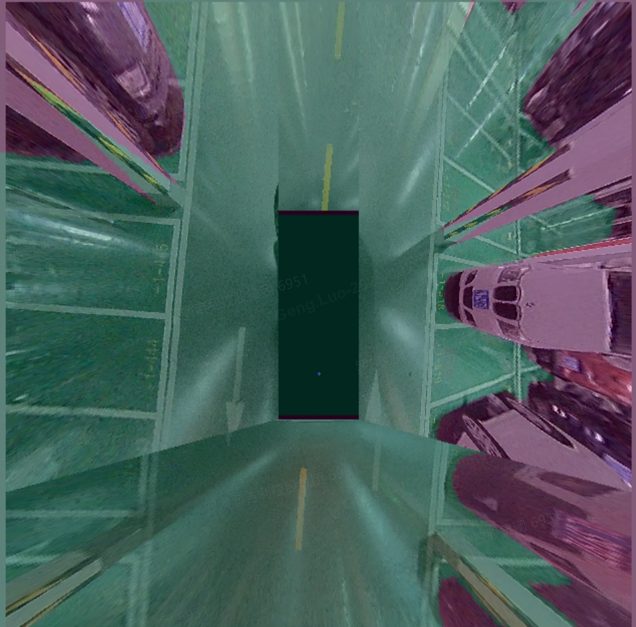
如果拼接不好(如上圖)會嚴重影響自駕效果;加油學習吧;
5. 代碼示例(簡化Python實現)
以下是一個使用OpenCV庫的簡化代碼示例,展示IPM和拼接的基本過程。假設相機參數已知。
import cv2
import numpy as np# 步驟1: 定義單應矩陣H(示例值,需實際標定)
H = np.array([[1.5, 0, 100], [0, 1.5, 50], [0, 0, 1]], dtype=np.float32) # 單應矩陣# 步驟2: 應用IPM到圖像
def apply_ipm(image, H):height, width = image.shape[:2]# 計算逆單應矩陣H_inv = np.linalg.inv(H)# 執行IPM變換ipm_image = cv2.warpPerspective(image, H_inv, (width, height), flags=cv2.INTER_LINEAR)return ipm_image# 步驟3: 圖像拼接
def stitch_images(ipm_image1, ipm_image2):# 初始化拼接器stitcher = cv2.Stitcher_create(cv2.Stitcher_PANORAMA)# 拼接圖像status, stitched_image = stitcher.stitch([ipm_image1, ipm_image2])if status == cv2.Stitcher_OK:return stitched_imageelse:raise Exception("拼接失敗")# 主程序
if __name__ == "__main__":# 加載輸入圖像(假設image1和image2是透視圖像)image1 = cv2.imread('image1.jpg')image2 = cv2.imread('image2.jpg')# 應用IPMipm_image1 = apply_ipm(image1, H)ipm_image2 = apply_ipm(image2, H)# 拼接圖像stitched_image = stitch_images(ipm_image1, ipm_image2)# 保存結果cv2.imwrite('stitched_output.jpg', stitched_image)
6. 應用與挑戰
- 應用場景:
- 自動駕駛:創建車輛周圍環境的實時鳥瞰圖。
- 監控系統:拼接多個攝像頭視圖,實現廣角監控。
- 機器人導航:提供環境地圖。
- 優勢:
- 消除透視畸變,提升圖像幾何一致性。
- 增強場景理解,便于后續處理(如目標檢測)。
- 挑戰與限制:
- 依賴相機標定精度:如果HHH估計不準,會導致映射失真。
- 計算開銷大:IPM和拼接算法需要較高計算資源。
- 動態場景處理:移動物體可能導致拼接偽影。
7. 總結
IPM圖像投影拼接技術通過逆透視映射校正圖像畸變,再結合拼接算法創建無縫鳥瞰視圖。它在多個領域有重要價值,但需精確的數學模型和優化實現。核心在于單應矩陣估計和特征匹配,數學公式如u=H?1pu = H^{-1} pu=H?1p是基礎。實際應用中,建議使用OpenCV等庫簡化開發,并針對場景調整參數。

)

















