一、按照維度區分
在信息系統中,“高速”是一個相對且多維的概念,其核心在于信號或數據的動態變化速率遠超傳統系統處理能力,導致必須采用專門的設計技術來保障傳輸質量與實時性。這一概念可從以下四個維度解析:
1、頻率維度:高頻信號的傳輸挑戰
高速信號的頻率通常處于數十兆赫茲(MHz)至數十吉赫茲(GHz)范圍。例如:
- PCIe 5.0:二進制比特的數據速率達32GT/s,基波頻率為16GHz,其信號上升沿時間需<15ps(皮秒),否則高頻諧波會被傳輸介質衰減,導致邊沿變緩(如15ps上升沿信號經FR4板材傳輸10cm后,上升沿可能延長至50ps)。
- 5G毫米波通信:工作頻段在24-40GHz,信號波長僅7.5-12.5mm,對傳輸線尺寸(如微帶線寬度需<0.1mm)和材料損耗(如Rogers 4350B板材損耗因子<0.0037)極為敏感。
關鍵結論:高頻信號的傳輸需解決介質損耗、導體損耗和色散效應,否則信號幅度會隨距離指數衰減(如1GHz信號在FR4走線中每10cm衰減約2dB)。
2、邊沿速率維度:瞬態變化的物理本質
高速信號的“高速”本質由邊沿速率(Slope Rate)決定,即單位時間內電壓或電流的變化量。例如:
- HBM3內存接口:數據速率達819GB/s,信號上升沿時間<20ps,對應邊沿速率>2V/ns。若邊沿速率不足(如100ps上升沿),信號頻譜中高頻分量減少,邊沿會變緩至100ps以上,導致時序違例。
- 激光雷達脈沖:脈沖寬度10ns,但上升沿時間0.5ns,其頻譜主瓣寬度達2GHz,需采用高速ADC(采樣率>4GS/s)才能無失真采集。
關鍵結論:邊沿速率決定信號中的最大頻率成分(fmax?≈0.35/Tr?),邊沿越陡,高頻分量越豐富,對傳輸線效應(如反射、串擾)越敏感。
3、時序維度:系統級實時性要求
高速信號的傳輸需滿足嚴格的時序約束,否則會導致系統功能失效。例如:
- DDR5內存:時鐘頻率4.8GHz,數據選通信號(DQS)與數據信號(DQ)的建立/保持時間需<50ps,若傳輸延遲不匹配(如PCB走線長度差>2mm),會導致數據采樣錯誤。
- PCIe 6.0:數據速率64GT/s,采用PAM4調制技術,每個符號攜帶2bit信息,但符號間干擾(ISI)需通過FEC(前向糾錯)補償,時序抖動需<5ps,否則誤碼率(BER)會超過10?12。
關鍵結論:高速信號的時序設計需考慮傳輸延遲、時鐘偏移和抖動,通常采用源同步時鐘(Source-Synchronous Clocking)或時鐘樹綜合(CTS)技術來平衡時序。
4、應用維度:場景驅動的技術需求
高速信號的定義因應用場景而異,需結合具體需求權衡設計指標。例如:
- 數據中心:服務器間需傳輸400G/800G光信號,采用硅光子技術,電信號邊沿速率需達20V/ns以上,同時需控制功耗(<10pJ/bit)和成本(<$1/Gbps)。
- 醫療影像:超聲成像需實時處理GHz級回波信號,ADC采樣率需>2GS/s,但功耗需<1W,需采用低功耗架構(如時間交織ADC)。
- 航空航天:飛行控制系統需傳輸納秒級脈沖信號,需采用差分信號傳輸(如LVDS)和屏蔽電纜,以抑制電磁干擾(EMI)。
關鍵結論:高速信號的設計需在帶寬、功耗、成本和可靠性之間取得平衡,不同場景對指標的優先級不同(如醫療影像優先低功耗,數據中心優先低成本)。
二、按照應用場景區分
1、數據中心:追求極致帶寬與低延遲
場景特征:服務器間大規模數據交互(如AI訓練、分布式存儲)。
高速定義:
- 帶寬:單通道速率達400G/800G(如800G OSFP光模塊),總帶寬可達Tbps級。單位時間傳輸二進制比特變化的數量。
- 延遲:端到端延遲需<1μs(如RDMA網絡),否則會影響分布式計算效率。單端到端單比特傳輸的延時。
技術挑戰: - 信號完整性:高速串行信號(如PCIe 6.0的64GT/s)需解決PAM4調制帶來的符號間干擾(ISI),需采用FEC(前向糾錯)和預加重技術。
- 功耗與散熱:800G光模塊功耗可能超過15W,需采用硅光子技術(如Co-Packaged Optics)降低功耗密度。
案例: - 谷歌TPU v4集群通過自定義光互聯網絡,實現1.6Pbps總帶寬,延遲<100ns,支撐千億參數大模型訓練。
2、5G/6G通信:高頻段與大規模MIMO
場景特征:移動終端與基站間無線數據傳輸。
高速定義:
- 峰值速率:5G下行達20Gbps(毫米波頻段),6G目標達1Tbps。
- 頻譜效率:需在高頻段(如24-100GHz)實現高效傳輸,覆蓋范圍與速率的平衡。
技術挑戰: - 高頻信號衰減:毫米波信號在空氣中衰減快(如28GHz信號每100m衰減約10dB),需采用波束成形(Beamforming)和大規模MIMO(64T64R)補償。
- 移動性管理:高速移動(如高鐵500km/h)會導致多普勒頻移(可達10kHz),需動態調整載波頻率。
案例: - 愛立信6G原型系統在140GHz頻段實現100Gbps傳輸,采用智能超表面(RIS)技術解決非視距(NLOS)覆蓋問題。
3、汽車電子:實時性與可靠性優先
場景特征:自動駕駛、車載娛樂等系統間數據交互。
高速定義:
- 實時性:傳感器數據(如激光雷達點云)需在10ms內完成處理,否則影響決策延遲。
- 確定性延遲:車載以太網(如10Gbps TSN)需保證端到端延遲<100μs,抖動<1μs。
技術挑戰: - 電磁兼容性(EMC):汽車內部電磁環境復雜(如電機干擾),需采用差分信號(如CAN FD)和屏蔽設計。
- 功能安全:需滿足ISO 26262 ASIL-D級要求,高速信號需具備冗余傳輸和錯誤檢測機制。
案例: - 特斯拉FSD芯片通過自定義車載網絡架構,實現100Gbps總帶寬,支持8個攝像頭實時數據融合。
4、醫療影像:高分辨率與低噪聲
場景特征:超聲、MRI等設備的數據采集與處理。
高速定義:
- 采樣率:超聲成像需2-4GS/s ADC采樣率,以捕捉GHz級回波信號。
- 動態范圍:需同時處理微弱信號(如組織反射)和強信號(如骨骼反射),動態范圍需>100dB。
技術挑戰: - 低噪聲設計:高速ADC需采用斬波穩定(Chopper Stabilization)技術降低1/f噪聲。
- 功耗優化:便攜式設備需將ADC功耗控制在<100mW,需采用時間交織(Time-Interleaved)架構。
案例: - GE Healthcare的MRI系統采用64通道高速接收機,采樣率達100MS/s,動態范圍120dB,支持亞毫米級成像。
5、航空航天:抗輻射與長壽命
場景特征:衛星、火箭等空間設備的數據傳輸。
高速定義:
- 速率:深空通信(如火星探測器)需支持Mbps級數據回傳,同時需抵抗宇宙射線干擾。
- 可靠性:設備需在-55℃~125℃溫度范圍內穩定工作,壽命需>15年。
技術挑戰: - 抗輻射加固:需采用SEU(單粒子翻轉)免疫設計(如三模冗余TMR電路)。
- 輕量化:衛星載荷需將高速通信模塊重量控制在<1kg,需采用CMOS工藝和集成化設計。
案例: - 詹姆斯·韋伯太空望遠鏡采用Ka波段高速下行鏈路,速率達28Mbps,通過LDPC編碼實現誤碼率<10?12。
6、消費電子:成本與功耗的極致平衡
場景特征:智能手機、AR/VR等便攜設備。
高速定義:
- 速率:USB4接口支持40Gbps,但需在<5W功耗下實現。
- 面積優化:芯片需集成高速接口(如MIPI C-PHY),同時控制面積<1mm2。
技術挑戰: - 低功耗設計:需采用動態電壓頻率調整(DVFS)和電源門控(Power Gating)技術。
- 成本敏感:需使用低成本封裝(如WLP)和成熟工藝節點(如28nm)。
案例: - 蘋果M1芯片通過統一內存架構,實現200GB/s帶寬,同時將功耗控制在<15W,支撐ProMotion顯示屏的120Hz刷新率。
總結:高速的場景化定義框架
| 維度 | 數據中心 | 5G/6G通信 | 汽車電子 | 醫療影像 | 航空航天 | 消費電子 |
|---|---|---|---|---|---|---|
| 核心指標 | 帶寬、延遲 | 峰值速率、頻譜效率 | 實時性、確定性延遲 | 采樣率、動態范圍 | 速率、可靠性 | 速率、功耗 |
| 技術重點 | 信號完整性、散熱 | 高頻信號處理、MIMO | EMC、功能安全 | 低噪聲、功耗優化 | 抗輻射、輕量化 | 成本、面積優化 |
| 典型速率 | 400G/800G | 20Gbps/1Tbps | 10Gbps TSN | 2-4GS/s ADC | Mbps級深空通信 | 40Gbps USB4 |
結論:高速是場景驅動的動態平衡,需根據具體需求在帶寬、延遲、功耗、成本、可靠性等指標間取舍。例如,數據中心優先追求帶寬和延遲,而消費電子則需在速率和功耗間找到最優解。理解這一場景化定義框架,是設計高速信息系統的關鍵前提。
三、速度的本質
是單位時間信號或數據變化的頻次,頻次越大,速度越大,或者說一次變化所需要的時間,時間越短,速度越大。
1、物理層本質:時間尺度與信號動態性
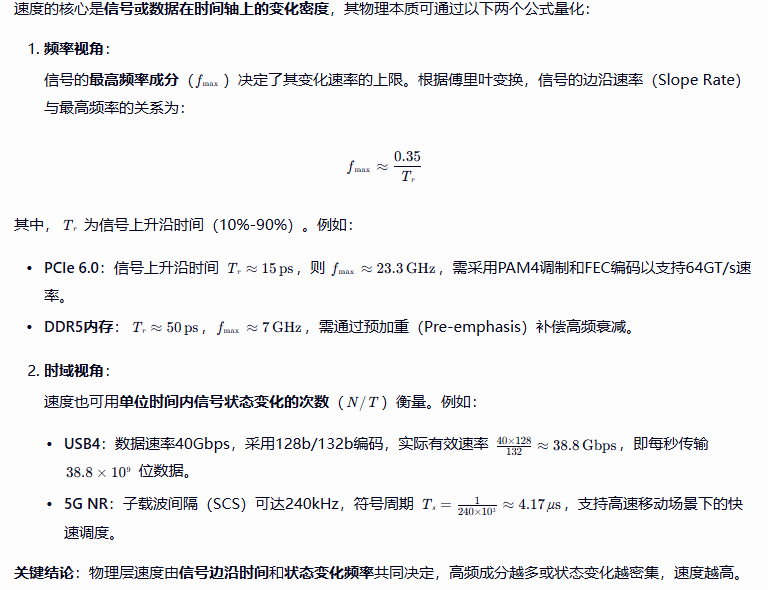
2、數學模型:微分與頻譜的關聯
從數學角度,速度的本質可通過微分和傅里葉變換揭示:
微分與邊沿速率:
信號的瞬時變化率(即速度)是其導數的絕對值。例如,理想方波信號的導數為沖激函數(Dirac Delta),其頻譜包含無限高頻成分;實際信號因邊沿有限,頻譜被截斷,導致最高頻率受限。頻譜與帶寬:
信號的帶寬(B)定義為頻譜中幅度不低于最大值-3dB的頻率范圍。根據奈奎斯特準則,無失真傳輸的最小采樣率為?2B。例如:- 激光雷達脈沖:脈沖寬度?τ=10ns,其頻譜主瓣寬度?B≈τ0.44?=44MHz,需采用ADC采樣率?>88MS/s?以避免混疊。
- 超聲成像信號:中心頻率?f0?=5MHz,帶寬?B=2MHz,需采用采樣率?>10MS/s?以捕獲回波信號。
關鍵結論:數學上,速度與信號的頻譜寬度直接相關,頻譜越寬,信號變化越快,對采樣和處理的要求越高。
3、工程實現:速度的約束與優化
在實際系統中,速度受物理介質、功耗、成本等多重約束,需通過技術手段平衡:
- 傳輸介質限制:
- 銅纜:FR4板材的損耗因子(Df)隨頻率升高而增加,導致高頻信號衰減。例如,10GHz信號在FR4中傳輸10cm衰減約10dB,需采用低損耗材料(如Rogers 4350B,Df<0.0037)。
- 光纖:單模光纖的帶寬可達THz級,但需高精度激光器(如DFB激光器)和相干檢測技術(如QPSK調制)以支持高速傳輸。
- 功耗與速度的權衡:
- ADC設計:高速ADC(如>1GS/s)的功耗通常與采樣率成正比。例如,TI的ADC12DJ5200RF采樣率5.2GS/s,功耗達3.5W;而ADI的AD9680采樣率500MS/s,功耗僅0.9W。
- 串行接口:PCIe 6.0通過PAM4調制將每符號攜帶比特數從1(NRZ)提升至2,在相同物理帶寬下速率翻倍,但需更復雜的均衡技術(如CTLE+DFE)以補償信號失真。
- 成本優化策略:
- 時間交織(Time-Interleaved):通過并行多個低速ADC(如4個1GS/s ADC交織)實現4GS/s總采樣率,降低單芯片成本。
- 硅光子集成:將光電器件(如激光器、調制器)與CMOS電路集成在單一芯片上,減少封裝成本(如Intel的100G PSM4光模塊成本可降低至$50以下)。
關鍵結論:工程中速度的提升需解決介質損耗、功耗膨脹和成本瓶頸,需通過材料創新、算法優化和系統架構設計實現平衡。
4、案例驗證:速度本質的實際應用
- 案例1:5G毫米波通信
- 問題:28GHz頻段信號在空氣中衰減快(自由空間路徑損耗?L=32.4+20log(f)+20log(d),其中?f?單位GHz,d?單位km),導致覆蓋范圍受限。
- 解決方案:采用波束成形(Beamforming)技術,通過多天線陣列聚焦信號能量,補償高頻衰減。例如,華為64T64R AAU設備可實現1km覆蓋半徑下的10Gbps速率。
- 案例2:自動駕駛激光雷達
- 問題:激光雷達需在100m距離內檢測反射信號,脈沖寬度需<10ns以區分目標,但高速ADC(如>1GS/s)成本高。
- 解決方案:采用時間數字轉換器(TDC)替代傳統ADC,通過測量脈沖飛行時間(ToF)直接獲取距離信息,功耗降低至<100mW,成本降至<$50。
- 案例3:數據中心硅光互聯
- 問題:800G光模塊功耗可能超過15W,導致散熱困難。
- 解決方案:采用共封裝光學(CPO)技術,將光引擎與交換機ASIC集成在單一封裝內,縮短電信號傳輸距離(<10cm),降低功耗至<10W。
總結:速度本質的三層理解
| 維度 | 核心描述 | 工程意義 |
|---|---|---|
| 物理層 | 速度由信號邊沿時間和狀態變化頻率決定,高頻成分越多或變化越密集,速度越高。 | 需選擇低損耗介質(如光纖)、優化信號邊沿(如預加重)以支持高速傳輸。 |
| 數學模型 | 速度與信號頻譜寬度直接相關,頻譜越寬,信號變化越快,對采樣和處理要求越高。 | 需根據奈奎斯特準則設計采樣率,采用頻譜整形技術(如升余弦濾波)避免混疊。 |
| 工程實現 | 速度受介質、功耗、成本約束,需通過技術創新(如PAM4、硅光子)實現平衡。 | 需在速度、功耗、成本間取舍,例如采用時間交織ADC降低單芯片成本,或CPO降低功耗。 |
最終結論:速度的本質是單位時間內信號或數據變化的頻次,其物理表現是高頻成分的豐富度,數學基礎是頻譜寬度,工程實現則是多約束條件下的優化問題。理解這一本質,是設計高速信息系統的關鍵前提。








--學習筆記17(Websocket))

,外加安裝兩個常用插件)




與 JDK、Maven、MyBatis-Plus、Tomcat 的版本對應關系及關鍵注意事項)



