1. 概述
2025年2月14日,清華大學AIR智能產業研究院聯合毫末智行、中科院自動化所和香港中文大學團隊,在ICLR 2025會議上發布了Diffusion Planner——一種創新性的基于Diffusion Transformer的自動駕駛規劃模型架構。該系統聯合建模周車運動預測與自車行為規劃,顯著提升了復雜場景下的決策效率與穩定性,克服了傳統學習方法對后處理的依賴,推動了自動駕駛系統從“黑盒生成”走向“可控可調”的新時代。
- 項目地址:https://zhengyinan-air.github.io/Diffusion-Planner/
2. 核心技術
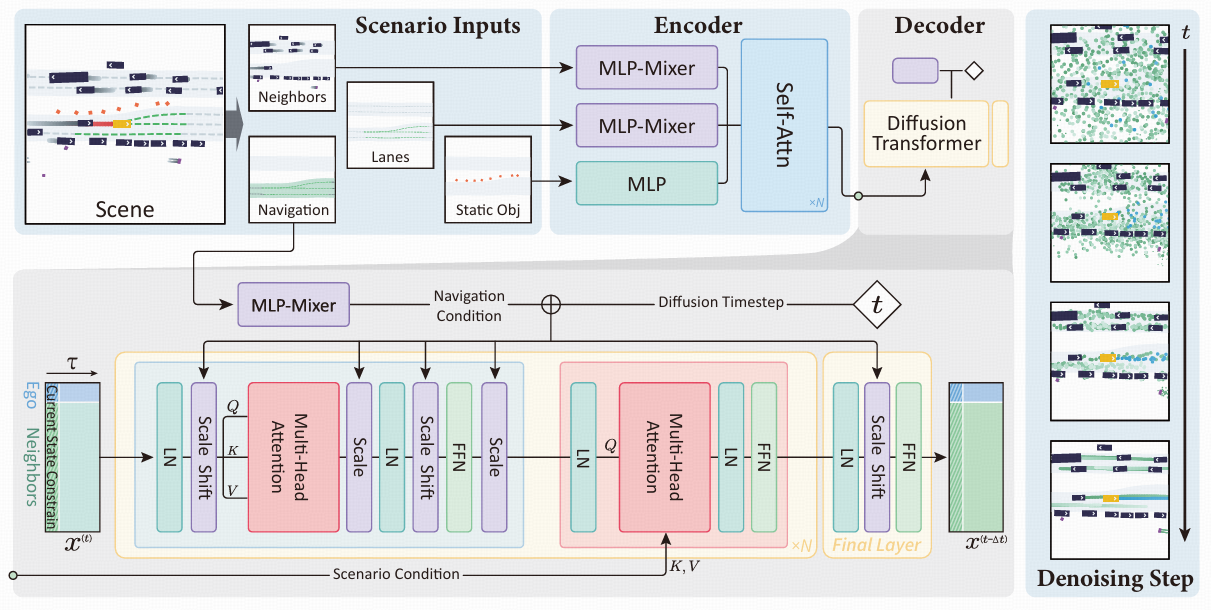
該算法創新性地設計了基于 Diffusion Transformer 的自動駕駛規劃模型架構,高效處理復雜場景輸入,并聯合建模周車運動預測與自車規劃中的多模態駕駛行為,充分發揮擴散模型在閉環規劃中的潛力,解決了現有基于學習的規劃方法對后處理的嚴重依賴問題。此外,借助擴散模型的引導機制,模型在部署階段能夠靈活適應不同的駕駛需求,提高泛化能力與實用性。
2.1 軌跡生成為核心建模任務
- 將自車規劃與周車運動預測統一為 未來軌跡生成任務;
- 以協同建模的方式模擬多車交互行為,捕捉動態交通環境中的 自然協同行為模式;
- 避免傳統多階段預測+規劃框架中的信息割裂和誤差累積問題。
2.2. 基于 Diffusion Transformer 的生成式軌跡建模
- 架構核心為 Diffusion Transformer(DiT),融合擴散建模與注意力機制;
- 采用擴散模型的前向加噪與反向去噪過程生成未來軌跡;
- 具備強建模能力,適應復雜多模態交通行為。
2.3 多源感知輸入結構化表達
- 使用輕量級編碼器提取以下環境感知數據:
- 周車歷史軌跡與當前狀態;
- 道路拓撲結構與靜態障礙物;
- 目標導航信息;
- 通過 交叉注意力機制 與加噪后的初始軌跡進行深度融合,提升軌跡生成準確性。
2.4. 起始狀態引導
- 避免模型復現已有歷史軌跡,破壞規劃多樣性;
- 僅使用 自車當前位姿(位置+朝向) 與周車當前狀態,拼接進初始軌跡;
- 提供有效初態引導,減輕去噪任務難度,提升 閉環執行穩定性。
2.5. 擴散引導機制,偏好可控軌跡生成
- 在測試/部署階段引入可控目標(如安全性、舒適性、速度偏好等);
- 多偏好通過 加權組合方式靈活調控;
- 可啟用/禁用偏好機制以適配不同場景需求,提升策略靈活性與適應性。
3. 商業前景
- Robotaxi 和 Robo-Logistics(無人貨運):復雜城市場景下對靈活軌跡生成的剛需;
- 乘用車輔助駕駛系統(L2+ / L3):需要高安全、穩定、可調控的規劃策略;
- 智能交通系統(ITS)仿真平臺:用于城市交通建模與仿真;
- 自適應路徑規劃機器人:在城市配送、園區清潔、巡檢等場景中部署。











的XOR異或pyTorch版250501)


![[pdf、epub]300道《軟件方法》強化自測題業務建模需求分析共257頁(202505更新)](http://pic.xiahunao.cn/[pdf、epub]300道《軟件方法》強化自測題業務建模需求分析共257頁(202505更新))




)