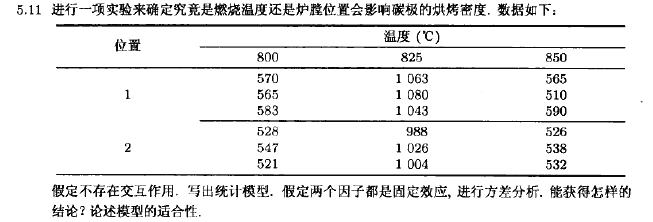
本文是實驗設計與分析(第6版,Montgomery著,傅玨生譯) 第5章析因設計引導5.7節思考題5.11 R語言解題。主要涉及方差分析,正態假設檢驗,殘差分析,交互作用圖。
dataframe<-data.frame(
density=c(570,565,583,528,547,521,1063,1080,1043,988,1026,1004,565,510,590,526,538,532),
Temperature=gl(3,6,18),
position=gl(2,3,18))
summary (dataframe)
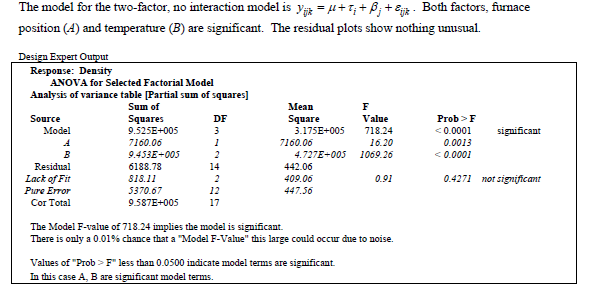
dataframe.aov2 <- aov(density~position+Temperature,data=dataframe)
summary (dataframe.aov2)
> summary (dataframe.aov2)
??????????? Df Sum Sq Mean Sq F value?? Pr(>F)???
position???? 1?? 7160??? 7160??? 16.2? 0.00125 **
Temperature? 2 945342? 472671? 1069.3 4.92e-16 ***
Residuals?? 14?? 6189???? 442????????????????????
---
Signif. codes:? 0 ‘***’ 0.001 ‘**’ 0.01 ‘*’ 0.05 ‘.’ 0.1 ‘ ’ 1
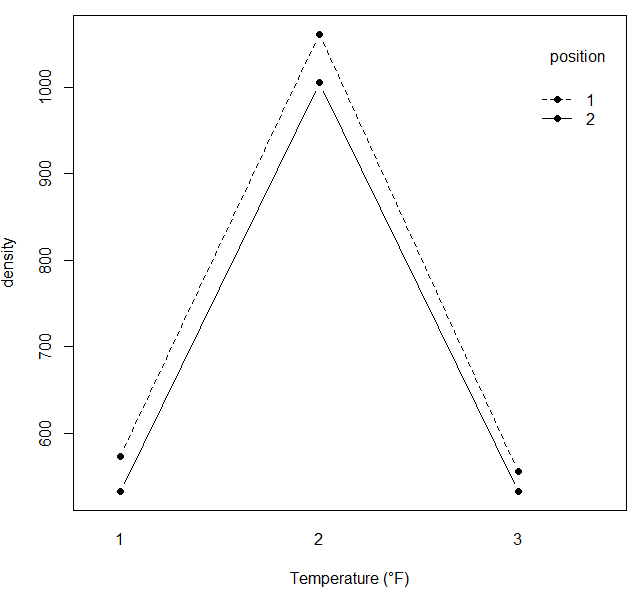
with(dataframe,interaction.plot(Temperature,position,density,type="b",pch=19,fixed=T,xlab="Temperature (°F)",ylab="density"))
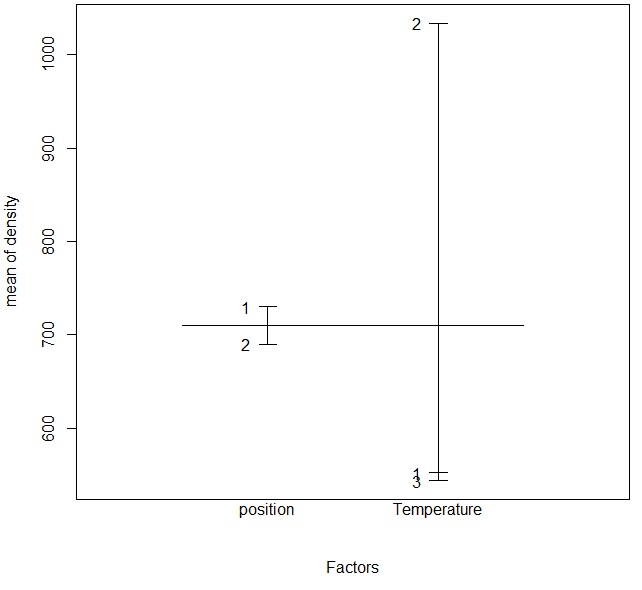
plot.design(density~position*Temperature,data=dataframe)
fit <-lm(density~position+Temperature,data=dataframe)
anova(fit)
> anova(fit)
Analysis of Variance Table
Response: density
??????????? Df Sum Sq Mean Sq? F value??? Pr(>F)???
position???? 1?? 7160??? 7160?? 16.197? 0.001254 **
Temperature? 2 945342? 472671 1069.257 4.924e-16 ***
Residuals?? 14?? 6189???? 442??????????????????????
---
Signif. codes:? 0 ‘***’ 0.001 ‘**’ 0.01 ‘*’ 0.05 ‘.’ 0.1 ‘ ’ 1
summary(fit)
> summary(fit)
Call:
lm(formula = density ~ position + Temperature, data = dataframe)
Residuals:
??? Min????? 1Q? Median????? 3Q???? Max
-53.444? -9.361?? 2.000? 11.639? 26.556
Coefficients:
???????????? Estimate Std. Error t value Pr(>|t|)???
(Intercept)?? 572.278????? 9.911? 57.740? < 2e-16 ***
position2???? -39.889????? 9.911? -4.025? 0.00125 **
Temperature2? 481.667???? 12.139? 39.680 8.69e-16 ***
Temperature3?? -8.833???? 12.139? -0.728? 0.47880???
---
Signif. codes:? 0 ‘***’ 0.001 ‘**’ 0.01 ‘*’ 0.05 ‘.’ 0.1 ‘ ’ 1
Residual standard error: 21.03 on 14 degrees of freedom
Multiple R-squared:? 0.9935,??? Adjusted R-squared:? 0.9922
F-statistic: 718.2 on 3 and 14 DF,? p-value: 1.464e-15
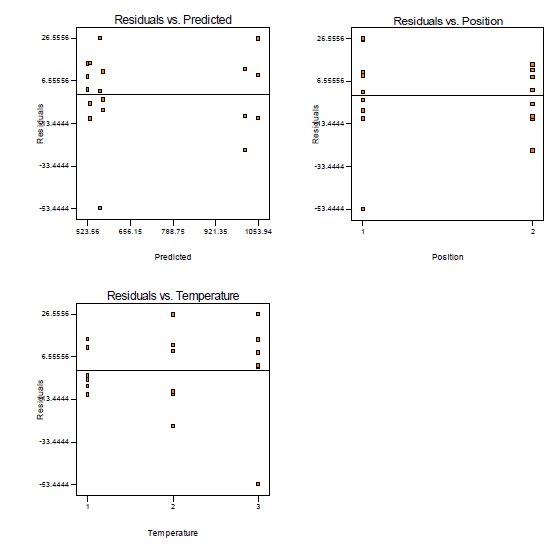
par(mfrow=c(2,2))
plot(fit)

par(mfrow=c(2,2))
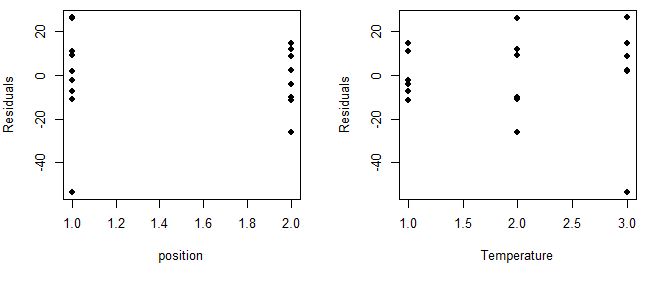
plot(as.numeric(dataframe$position), fit$residuals, xlab="position", ylab="Residuals", type="p", pch=16)
plot(as.numeric(dataframe$Temperature), fit$residuals, xlab="Temperature", ylab="Residuals", pch=16)















![[網頁五子棋][用戶模塊]客戶端開發(登錄功能和注冊功能)](http://pic.xiahunao.cn/[網頁五子棋][用戶模塊]客戶端開發(登錄功能和注冊功能))

)

