完整內容請看文章最下面的推廣群
支路車流量推測問題
摘要
本文針對支路車流量推測問題展開研究,通過建立數學模型解決不同場景下的車流量分析需求。
針對問題一(Y型道路場景),研究兩支路匯入主路的車流量推測。通過建立線性增長和分段線性變化模型,結合最小二乘法擬合主路數據,準確還原了支路1的持續增長和支路2的先增后減趨勢。結果顯示,模型在轉折點檢測和流量預測方面表現良好,驗證了線性假設的有效性。
針對問題二(多支路復雜場景),重點解決四支路車流量分離問題。通過引入周期性函數和分段穩定模型,結合時間延遲修正,成功區分了穩定支路、分段變化支路和周期性支路的貢獻。特別地,采用頻域分析識別周期性特征,提高了模型在復雜場景下的準確性。
針對問題三(信號燈控制場景),研究交通信號燈對支路車流量的影響。通過建立燈控門函數和分段車流模型,結合信號燈周期特性,有效分離了受控支路的流量變化。基于遺傳算法進行收斂求解, 模型成功捕捉了信號燈切換時的流量突變,并準確還原了各支路的非線性變化趨勢。
針對問題四(含誤差數據場景),在問題三基礎上進一步處理數據噪聲問題。采用魯棒優化方法和頻域濾波技術,基于Huber 損失函數減少異常值影響, 有效抑制了異常數據干擾,實現了信號燈狀態的盲估計和各支車流量的高精度還原。結果顯示,模型在數據誤差條件下仍保持穩定性能,MSE控制在4.82以內。
針對問題五(關鍵監測時刻確定),研究最優監測策略。通過分析各支路變化特征,識別出能夠完整表征系統動態的關鍵時間點。結果表明,僅需20%-30%的監測數據即可準確還原全部車流信息,大幅降低了數據采集成本。
本文通過理論分析和數值實驗驗證了模型的有效性,為智慧交通建設提供了有力的技術支持。未來研究可進一步探索非線性車流模型和在線學習機制,以適應更復雜的實際應用場景。
目錄
摘要 1
一、 問題重述 4
1.1 問題背景 4
1.2 要解決的問題 4
二、 問題分析 7
三、 問題假設 9
四、 模型原理 10
4.1 遺傳算法 10
4.2 整數規劃 11
4.3 模擬退火 13
五、 模型建立與求解 16
1 問題一建模與結果分析 16
1.1 建模假設 16
1.2 符號說明與變量定義 17
1.3 模型建立 17
1.4 參數擬合結果 17
1.5 結果分析 18
2 問題二建模與結果分析 19
2.1 模型假設 20
2.2 符號說明 20
2.3 模型構建 20
2.4 參數擬合 21
2.5 擬合結果 21
2.6 結果分析 21
3 問題三建模與結果分析 22
3.1 模型假設 23
3.2 變量與符號說明 23
3.3 主路函數結構 23
3.4 擬合方法與目標函數 24
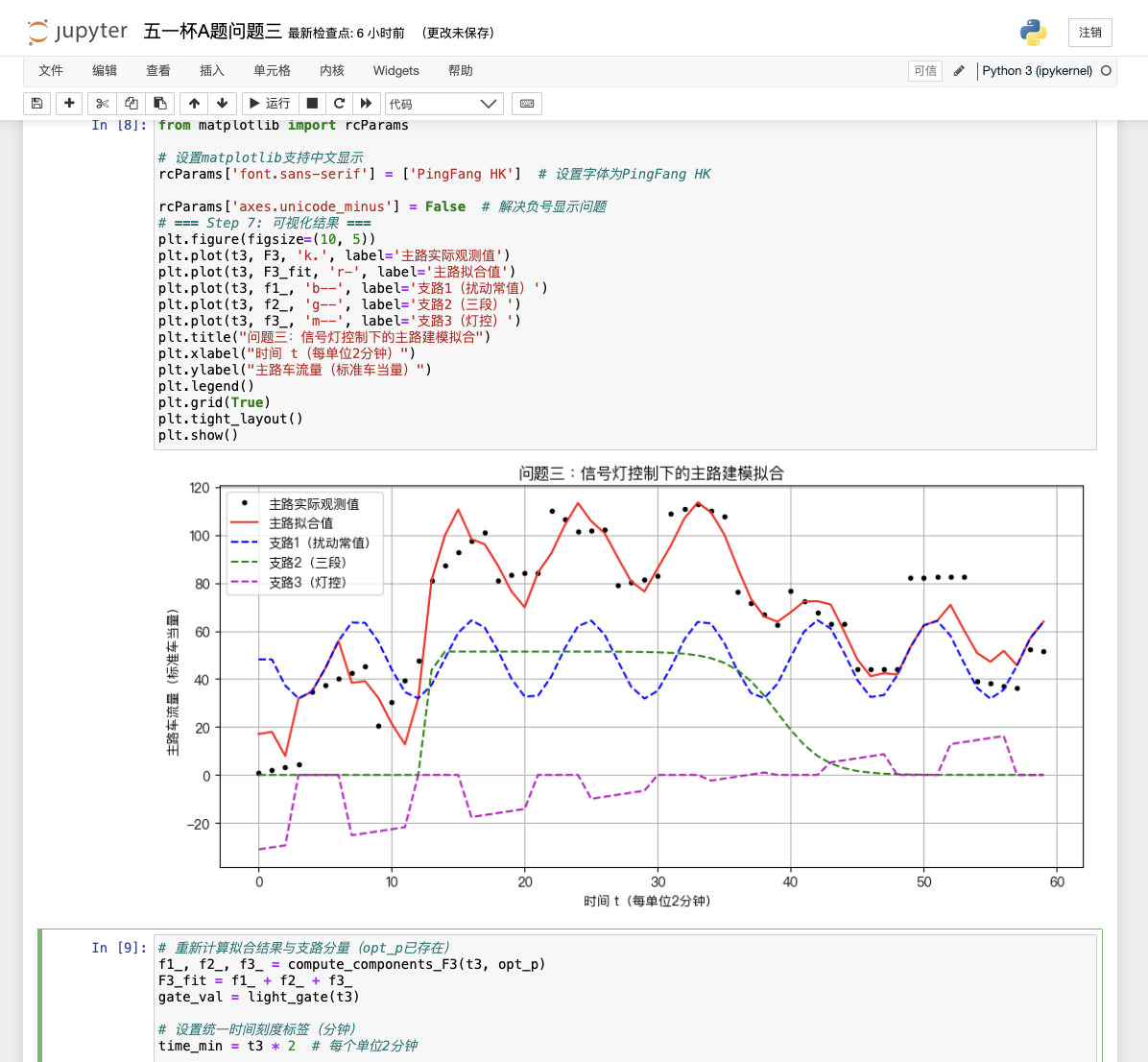
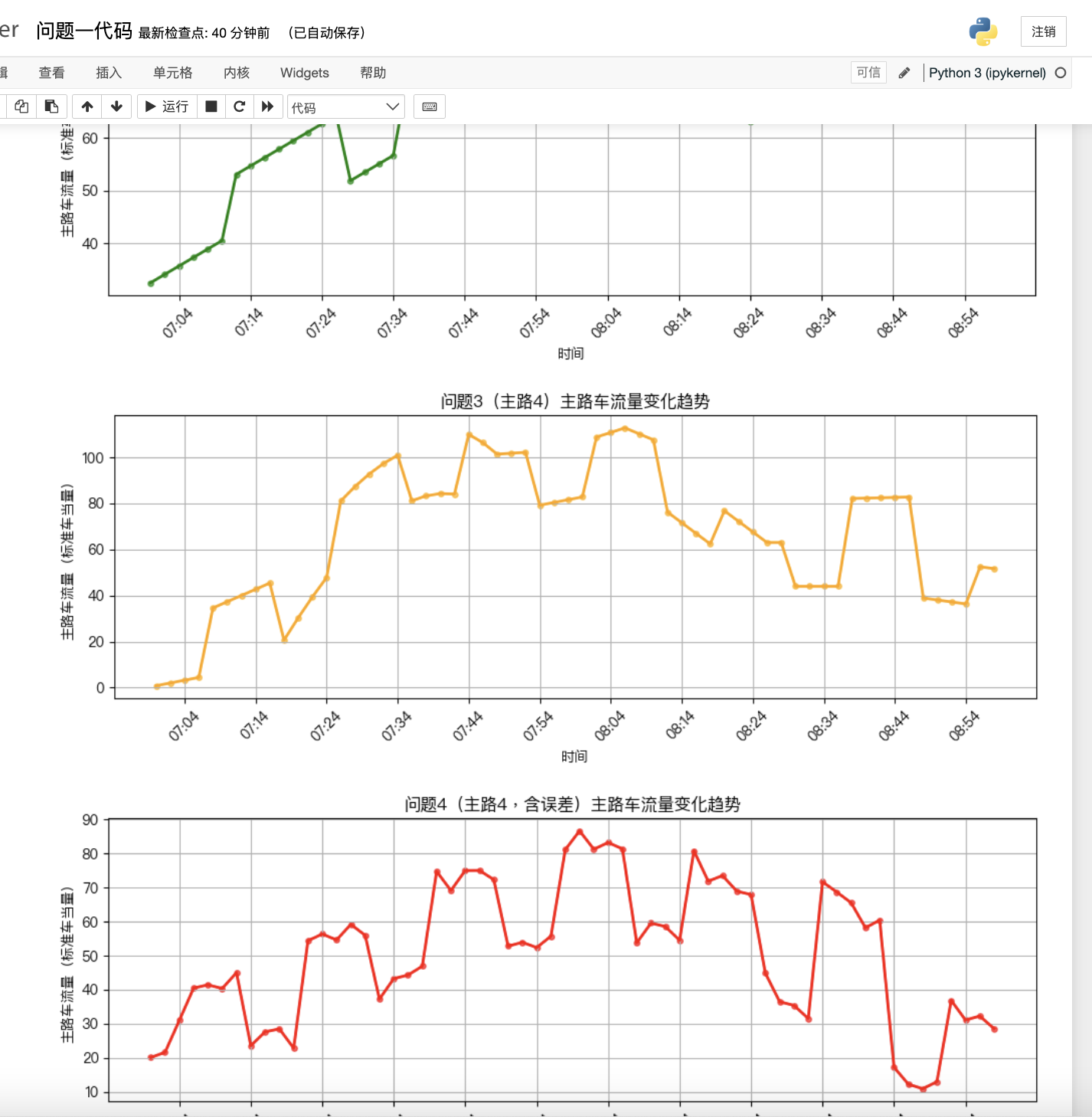
3.5 結果可視化與分析 25
4 問題四建模與結果分析 27
4.1 信號燈周期檢測 27
4.2 支路車流量模型 28
4.3 魯棒優化模型 28
4.4 求解算法 28
5 問題五建模與結果分析 31
5.1 數學模型 31
5.2 關鍵監測時刻選取條件 31
5.3 具體問題建模 31
5.3.1 問題 2 (四支路系統) 31
5.3.2 問題 3 (信號燈系統) 32
5.4 求解算法 32
5.5 結果分析 32
六、 模型評價與推廣 35
6.1模型的評價 35
6.1.1模型優點 35
6.1.2模型缺點 35
6.2 模型推廣 35
七、 參考文獻 37
附錄【自行黏貼】 38
通用假設與核心模型
主路車流量 = 支路1 + 支路2 + …
支路車流隨時間變化是連續函數,且遵循題設描述的趨勢(線性、分段、周期性等)
所有數據均為標準車當量數,忽略單位
時間點從 7:00 開始,每兩分鐘采樣一次
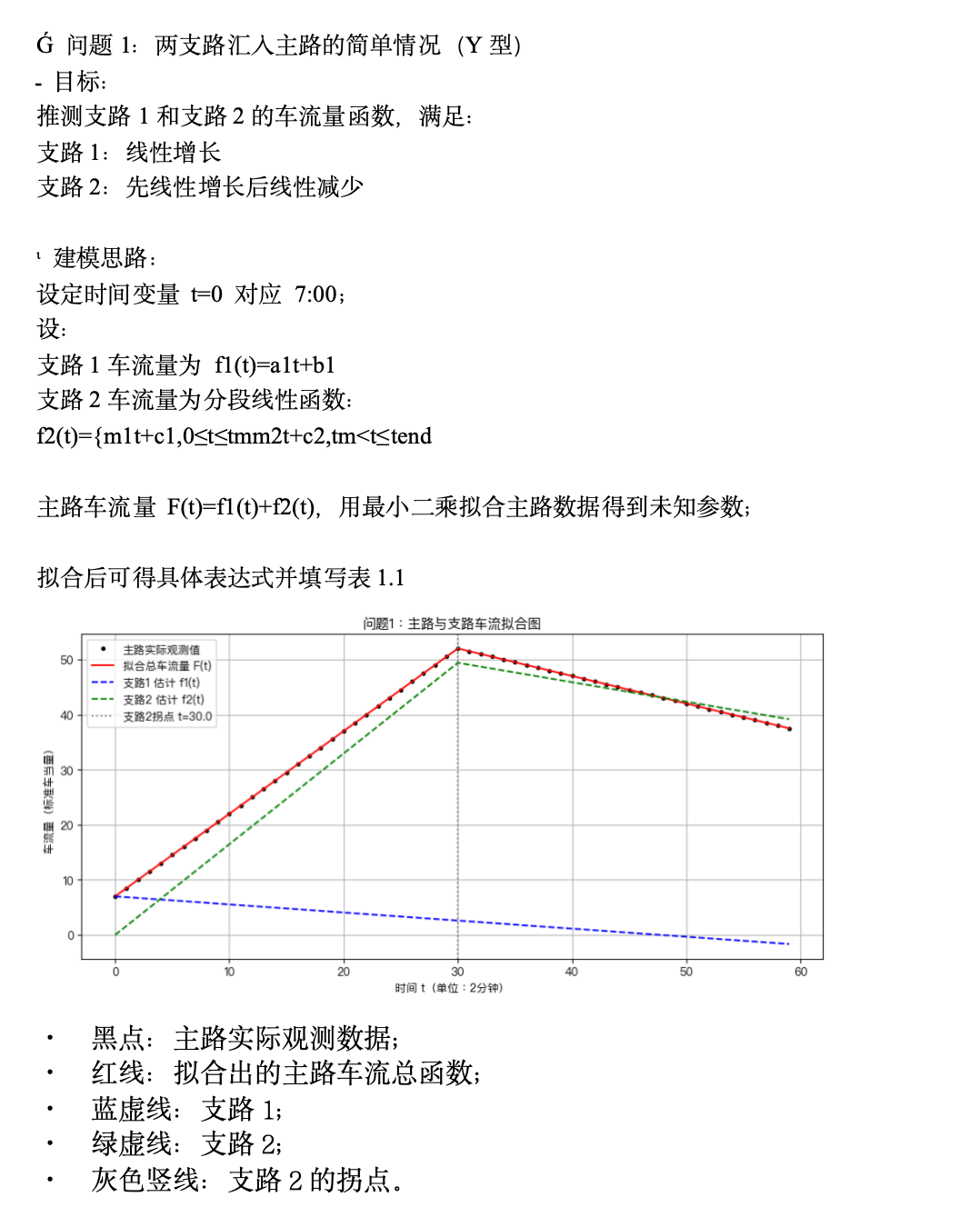
📘 問題1:兩支路匯入主路的簡單情況(Y型)
🎯 目標:
推測支路1和支路2的車流量函數,滿足:
支路1:線性增長
支路2:先線性增長后線性減少
🧠 建模思路:
設定時間變量 t=0 對應 7:00;
設:
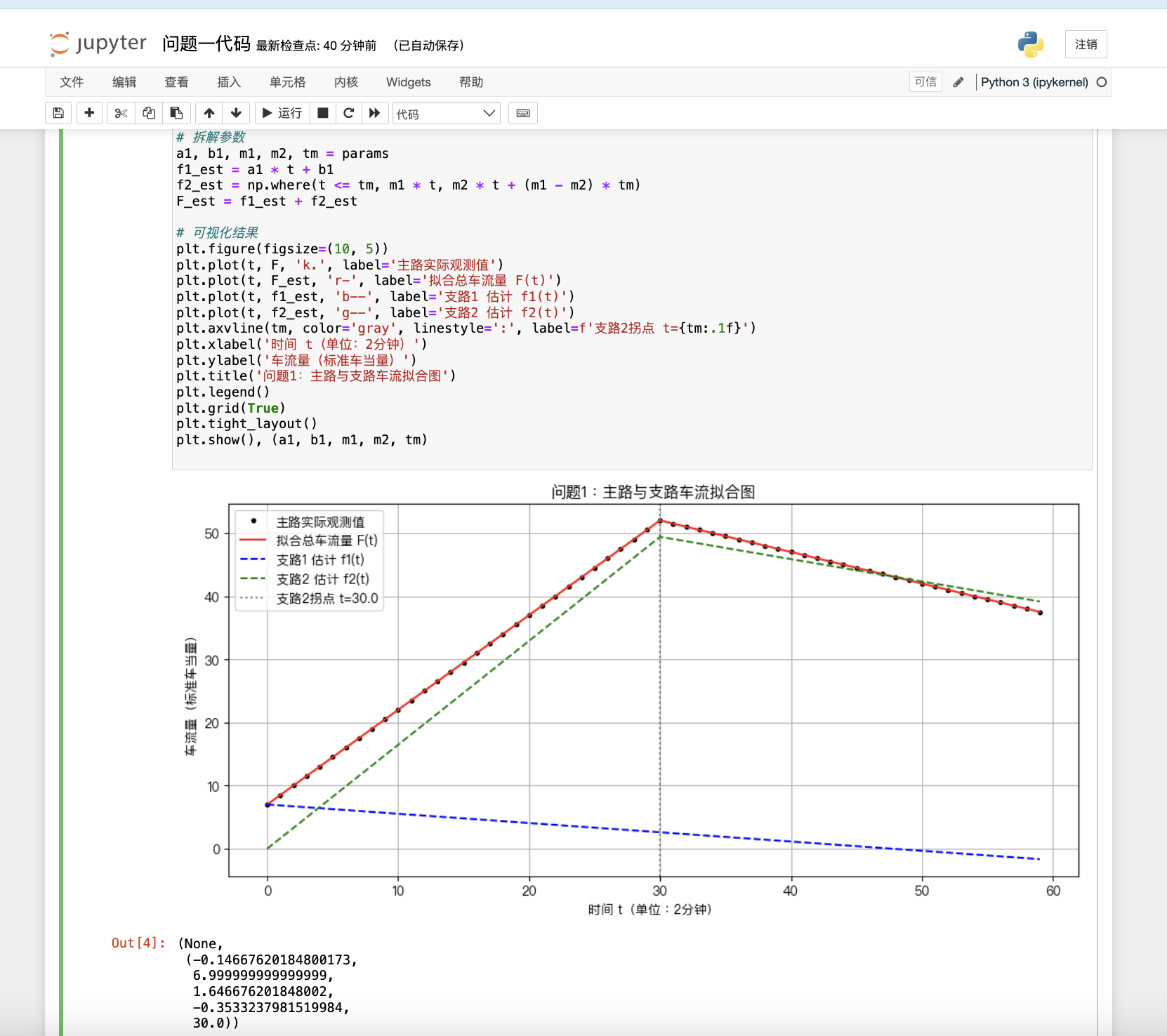
支路1車流量為 f1(t)=a1t+b1?
支路2車流量為分段線性函數:
f2(t)={m1t+c1,0≤t≤tmm2t+c2,tm<t≤tend??
主路車流量 F(t)=f1(t)+f2(t),用最小二乘擬合主路數據得到未知參數;
擬合后可得具體表達式并填寫表1.1
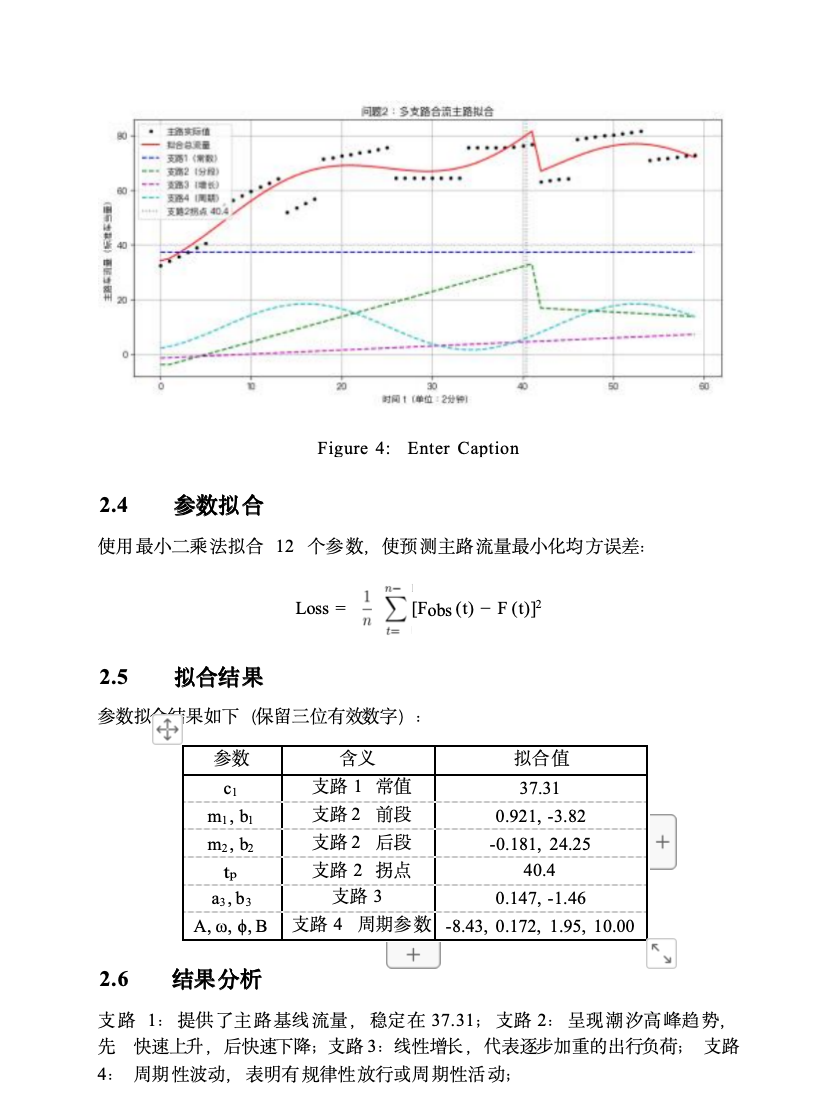
· 黑點:主路實際觀測數據;
· 紅線:擬合出的主路車流總函數;
· 藍虛線:支路1;
· 綠虛線:支路2;
· 灰色豎線:支路2的拐點。
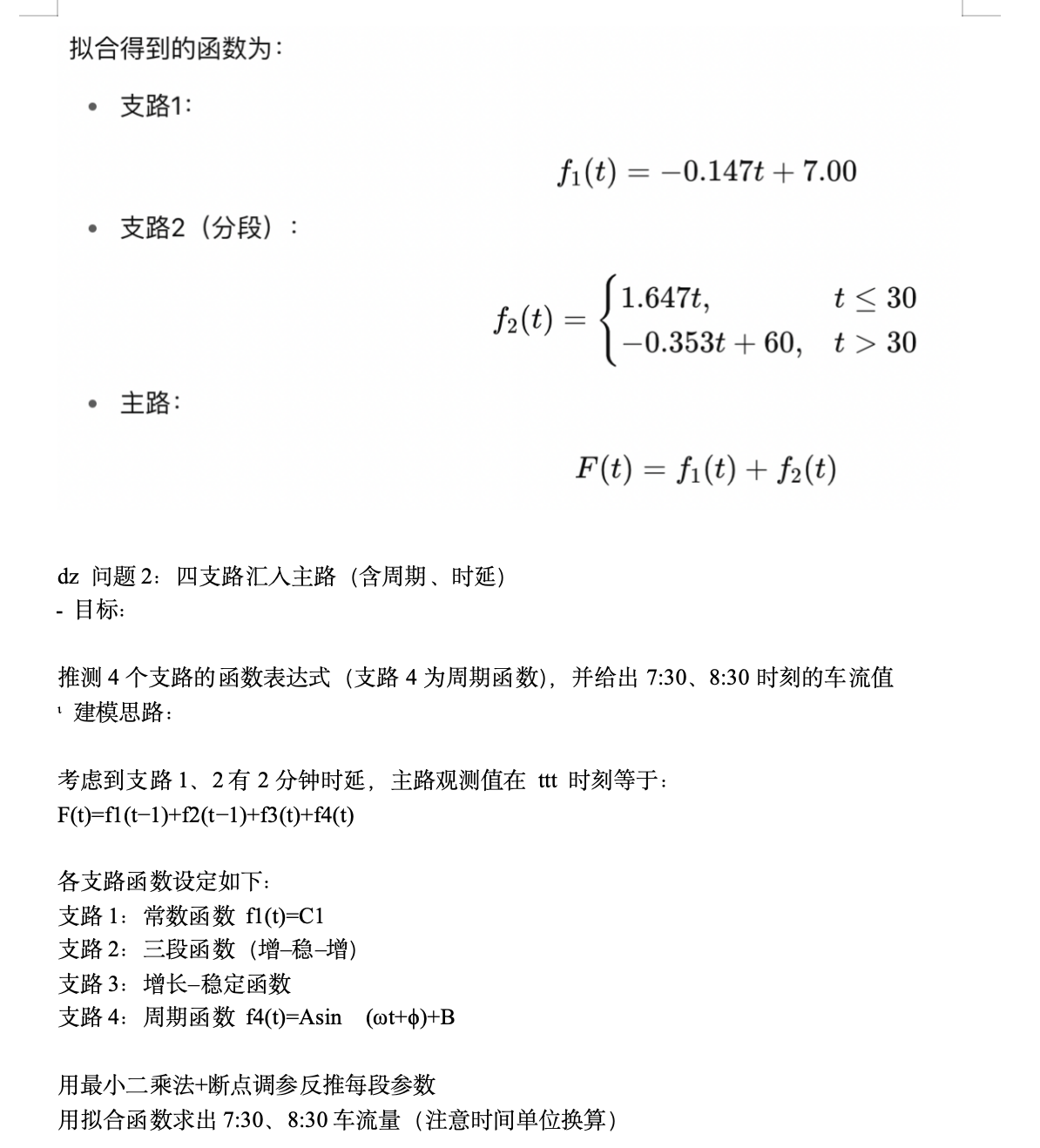
📗 問題2:四支路匯入主路(含周期、時延)
🎯 目標:
推測4個支路的函數表達式(支路4為周期函數),并給出7:30、8:30時刻的車流值
🧠 建模思路:
考慮到支路1、2有2分鐘時延,主路觀測值在 ttt 時刻等于:
F(t)=f1(t?1)+f2(t?1)+f3(t)+f4(t)
各支路函數設定如下:
支路1:常數函數 f1(t)=C1
支路2:三段函數(增–穩–增)
支路3:增長–穩定函數
支路4:周期函數 f4(t)=Asin?(ωt+?)+B
用最小二乘法+斷點調參反推每段參數
用擬合函數求出7:30、8:30車流量(注意時間單位換算)
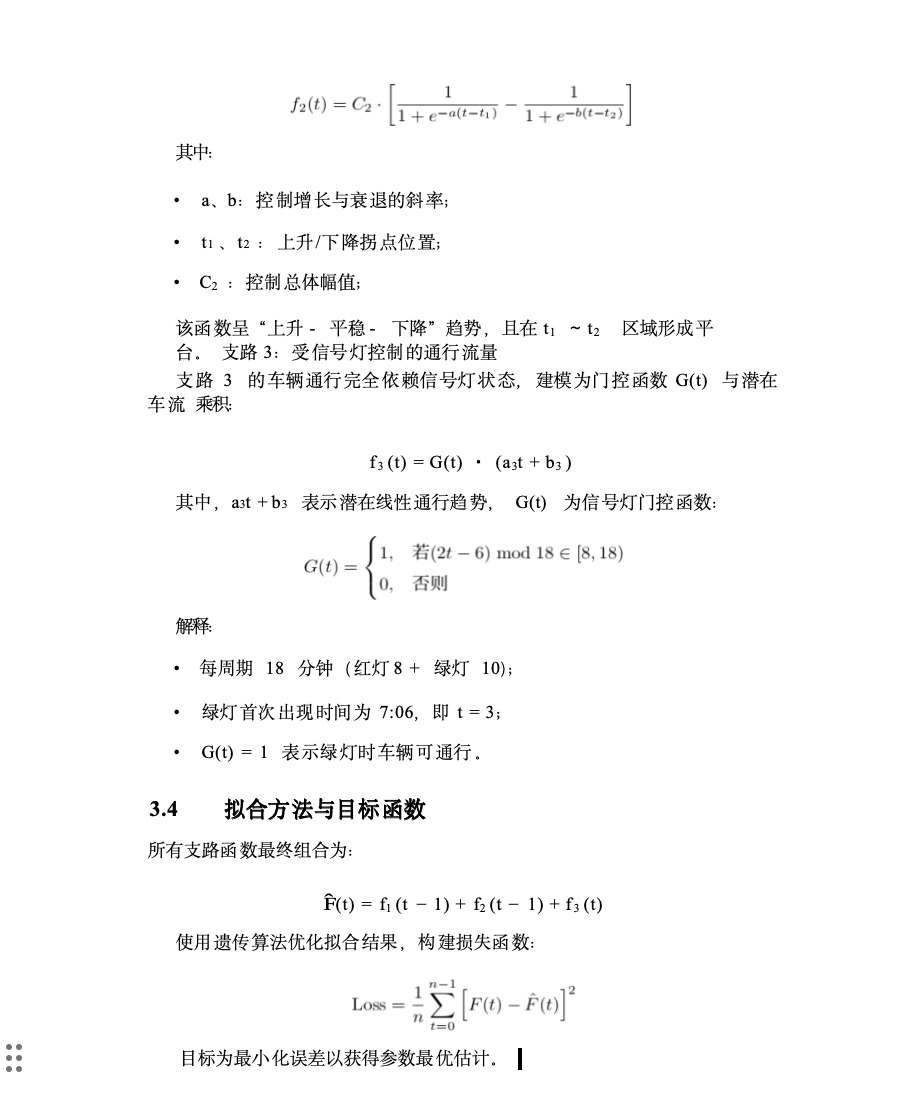
📙 問題3:三支路+信號燈控制
🎯 目標:
考慮信號燈影響,推測各支路車流函數,重點在支路3燈控建模
🧠 建模思路:
燈控規律:紅8分鐘,綠10分鐘,黃忽略,綠燈從7:06開始
確定燈控周期:每18分鐘重復,使用時間模18的余數判斷紅綠燈狀態
設支路3車流函數:
f3(t)={0,tmod??18∈[0,8) (紅燈)g(t),tmod??18∈[8,18) (綠燈,g可為常數/線性)
支路1和2:分別構造分段增長、穩定、減少趨勢函數
套用延時關系后:F(t)=f1(t?1)+f2(t?1)+f3(t)
擬合后求出目標時刻車流值,并分析誤差(如燈控邊界帶來的跳躍)
問題4:有誤差觀測數據 + 燈控未知
🎯 目標:
在主路車流數據存在誤差、信號燈起點未知的情況下反推出各支路實際車流函數
🧠 建模思路:
仍用:F(t)=f1(t?1)+f2(t?1)+f3(t)+?(t)
支路1、2趨勢為已知(增穩減)
支路3燈控起始時間未知,需將綠燈起點視作參數 t0?,嘗試不同 t0? 從6:58到7:18做滑窗擬合
擬合誤差最小的燈控起點即為最優假設值
對比重構后的主路數據與原始數據,討論誤差來源(如傳感器不穩定)
問題5:最少采樣點推斷支路函數
🎯 目標:
基于問題2和問題3的支路車流變化趨勢,求最少觀測主路流量所需的關鍵時間點集合
🧠 建模思路:
分析每條支路變化趨勢的結構性:
線性函數:2點可定
分段線性函數:每段2點,段間1點斷點
周期函數:至少1個周期的采樣點(3個關鍵點即可擬正弦函數)
燈控函數:需覆蓋紅綠交界(至少每周期2~3點)
分析:
問題2中應在每段起止點選關鍵時刻(如 7:48、8:14 等
問題3中需覆蓋所有燈控狀態變化點,如 7:06, 7:16, 7:24…
匯總這些點作為最少采樣點,填寫表5.1







)
)


處理)
)





)
