SLAM(七)-卡爾曼濾波
- 一、卡爾曼濾波(KF)
- 二、擴展卡爾曼濾波(EKF)
- 三、誤差狀態卡爾曼濾波(ESKF)
參考《概率機器人》、《Principles of GNSS,lnertial and Multisensor lntegrated Navigation Systems
(Second Edition)》
一、卡爾曼濾波(KF)
卡爾曼濾波(KF,kalman filter)是一種線性濾波方法。
狀態方程:噪聲為Rt

觀測方程:
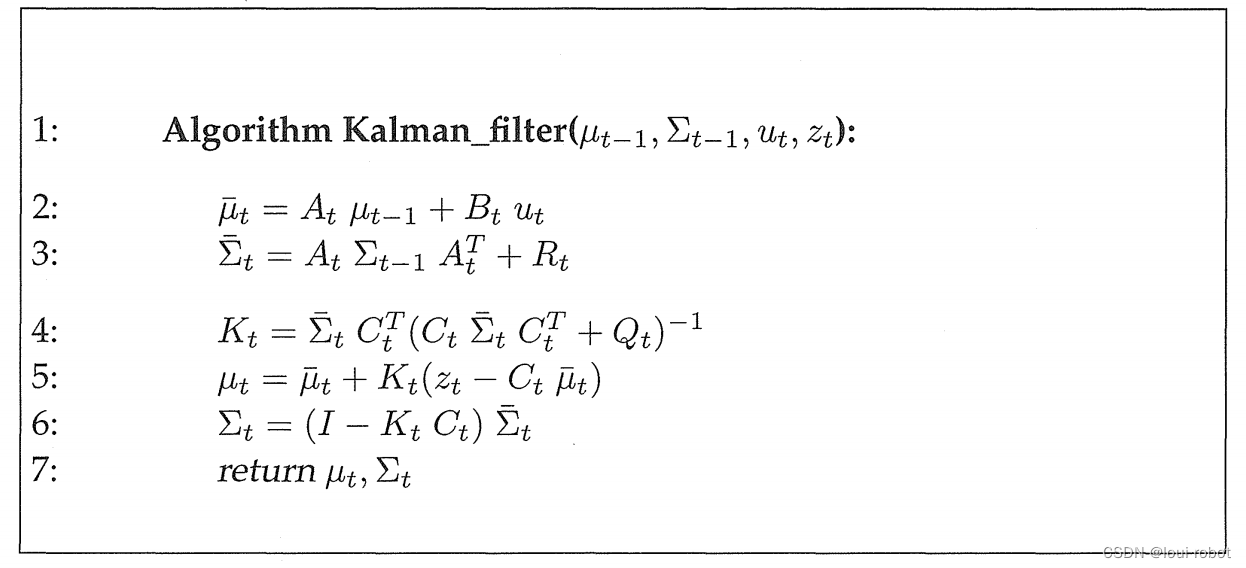
預測更新:
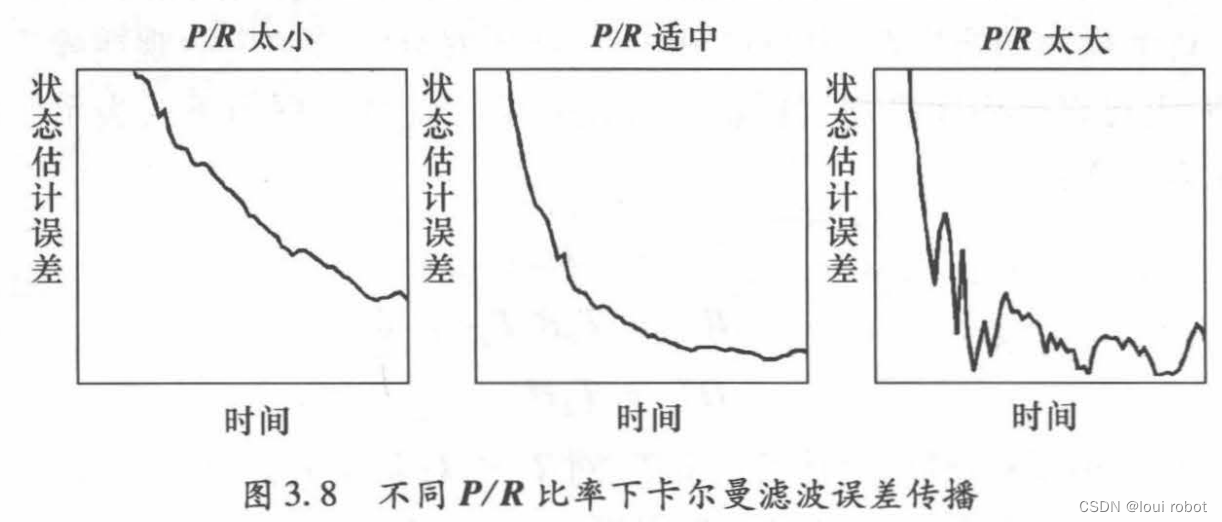
1、如果 P/R小,相應的卡爾曼增益會很小并且狀態估計收斂到真值的速度會更慢 對應到
系統的變化,狀態估計過程會變慢 相反,如果 P/R 太大,卡爾曼增益會非常
大,這將使濾波更側重于最近的觀測值,從而會因為觀測噪聲對狀態估計產生了
太大的影響而導致濾波不穩,或產生估計偏差。有時,通過系統模型狀態估計與
觀測噪聲會形成正反饋,并最終導致濾波器的迅速發散,遠離真值。這里假設觀測是比較準的,預測步方差P過大/觀測噪聲過小,類似于比例因子K比較大,超調量會比較大,容易振蕩;預測步方差P過小/觀測噪聲過大,K較小,收斂速度比較慢
二、擴展卡爾曼濾波(EKF)
《概率機器人》P40
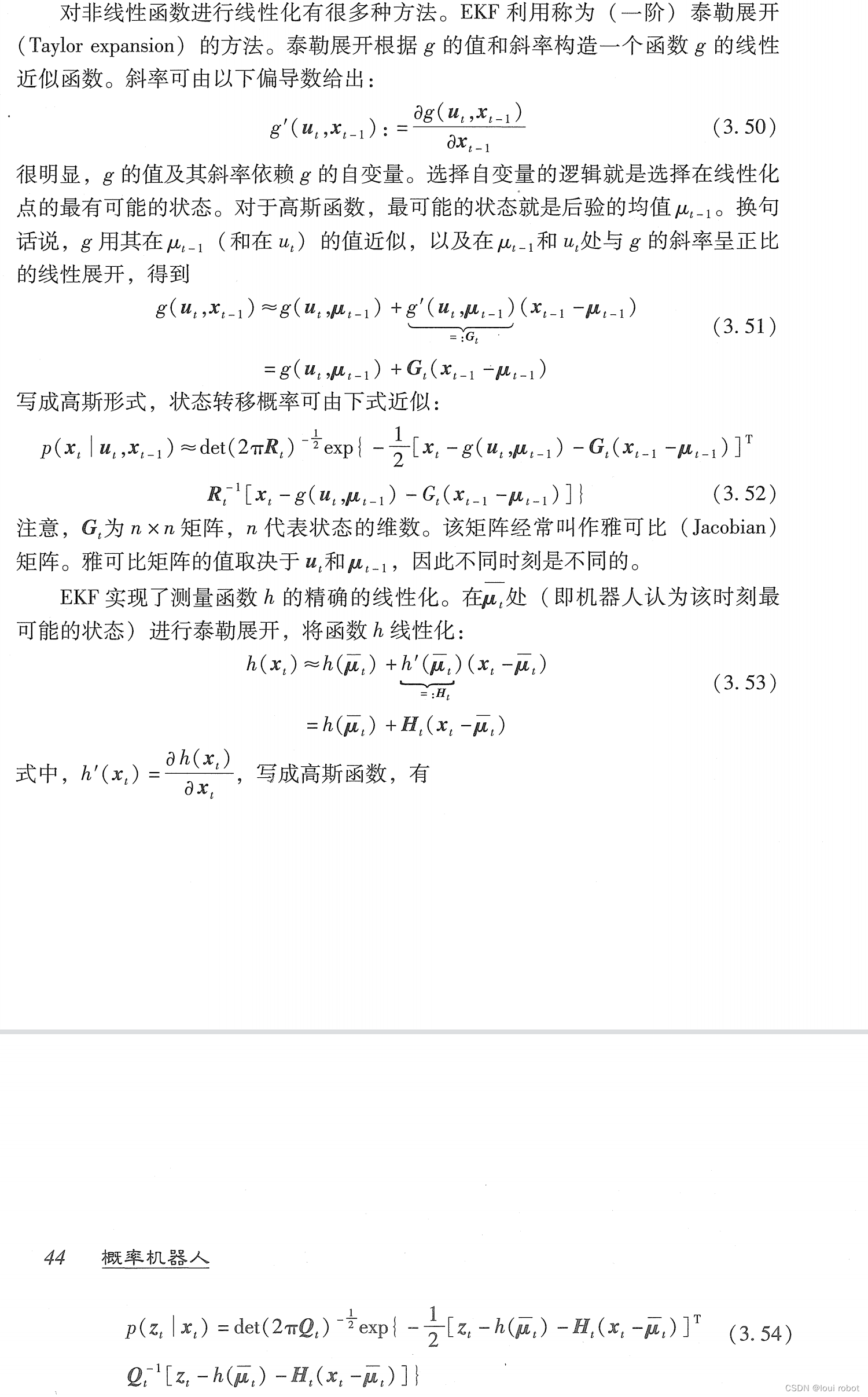
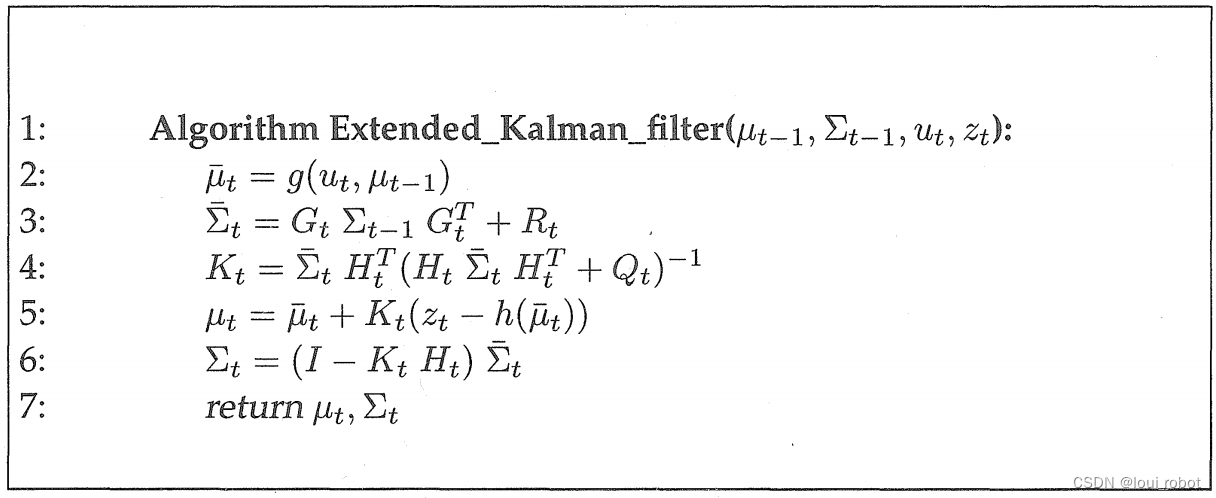
擴展卡爾曼濾波(EKF,extend kalman filter)是一種非線性濾波方法。先將非線性狀態轉移和觀測方程使用一階泰勒展開線性化,然后使用卡爾曼方法預測和更新即可。
非線性方程:

線性化后:
預測:
三、誤差狀態卡爾曼濾波(ESKF)
誤差傳播
1)慣性傳感器誤差,即陀 螺和加速度計的噪聲、零偏、比例因子誤差和交軸耦合等各類誤差。
2)導航初始化誤差,包括位置、速度和姿態等參數的初值誤差。
3)重力誤差,主要是重力模型誤差和位置誤差帶來的重力計算誤差等
4)算法和計算誤差
基于擾動方法推導誤差狀態方程和觀測方程
狀態方程推導
1)首先將有誤差的變量建模為誤差狀態δx=x_true - x,x_true為真值,x為估計值,姿態誤差需要單獨定義,在計算或得到變量 x 的過程中是否引入含有誤差的變量,或者誤差幅度是否可以小到忽略不計。
2)求解誤差狀態δx導數,得到連續狀態的狀態轉移函數,其導數與x_true 和x導數差相等,根據x導數解析解,x_true誤差變量加上擾動δx,x導數不變,再將兩者相減得到誤差狀態轉移方程;姿態根據q_true導數解析解和擾動方差2種不同的求導方式,然后取等號進行求解
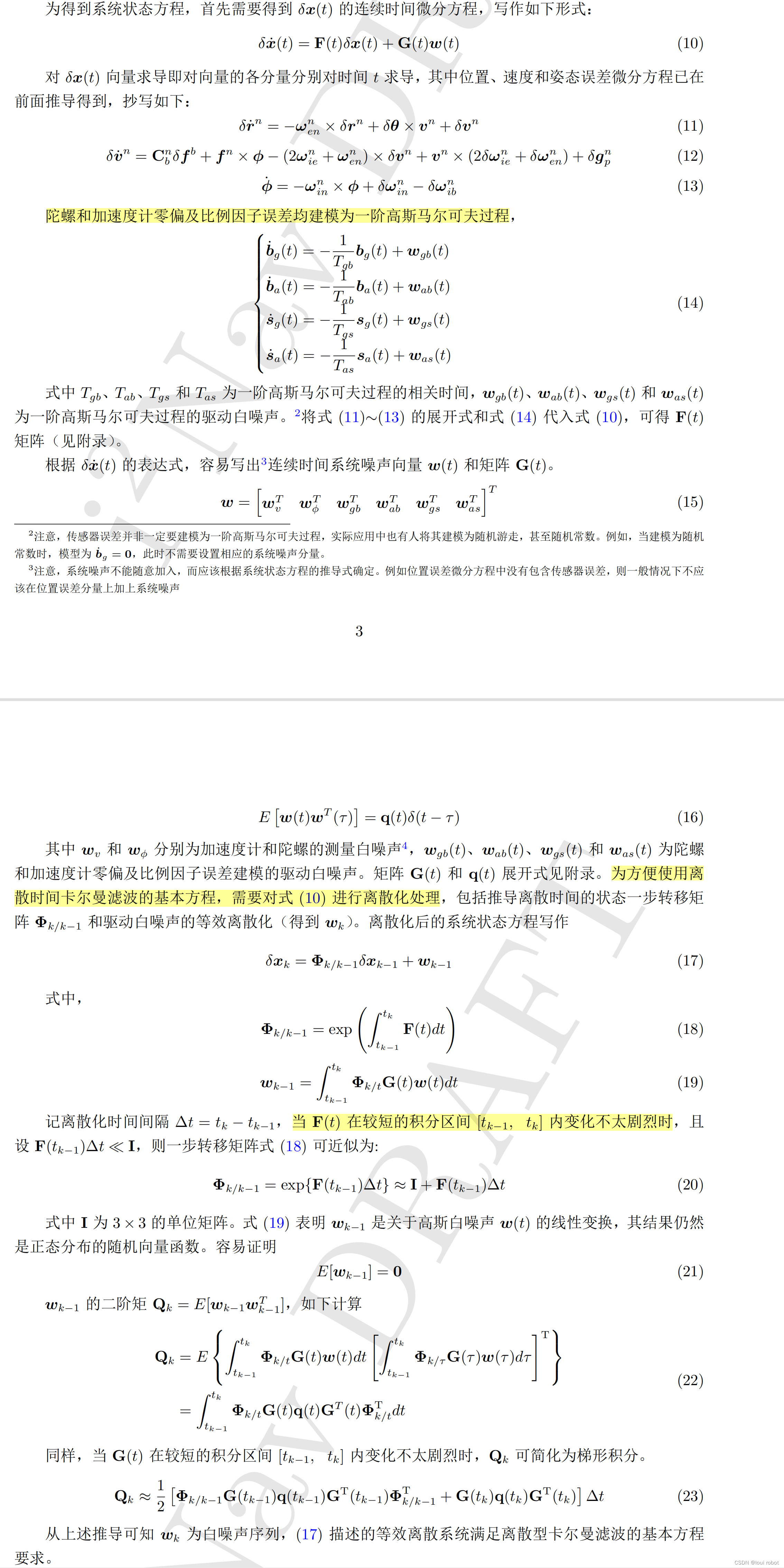
3)離散化:δx導數=(δx_k-δx_k-1)/δt,根據中值法、歐拉法不同方法離散化,如VINS推導;或采用如下圖牛小驥團隊《組合導航》課程方式離散化。注意一般給定的是連續狀態的噪聲,需要轉為離散化誤差狀態噪聲再套卡爾曼公式,噪聲為一段時間的累積
觀測方程:
4)觀測誤差更新方程不需要求導,將觀測減去估計值構建,需要把觀測噪聲轉為誤差觀測狀態噪聲,得到誤差狀態協方差更新方程與狀態協方差不同,噪聲是某個時刻的

5)狀態反饋:使用誤差狀態δx_k更新當前狀態


)



IdeNet信息增強模塊 性能提升必備!](http://pic.xiahunao.cn/[IEEE TIP 2024](cv即插即用模塊分享)IdeNet信息增強模塊 性能提升必備!)



詳解:從零開始掌握(2))

:字節最新表情+動作模仿視頻生成DreamActor-M1)






