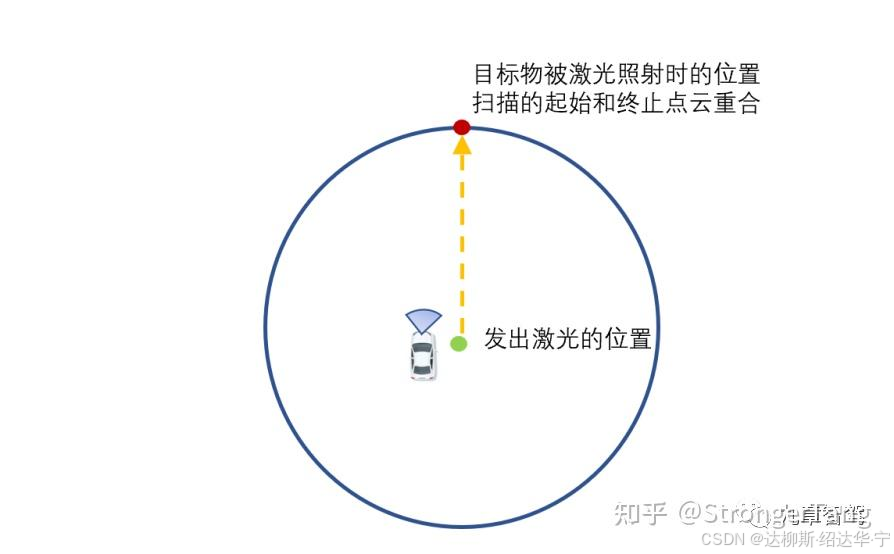
當激光雷達(LiDAR)在運動中采集點云時,每個點的時間戳不同,而車輛在移動,導致點云在不同時間點的坐標與實際情況不符,這種現象稱為運動畸變(Motion Distortion)。為了得到無畸變的點云,需要進行運動畸變補償。
LIO-SAM(IMU + LiDAR):https://github.com/TixiaoShan/LIO-SAM
https://ieeexplore.ieee.org/document/9341176
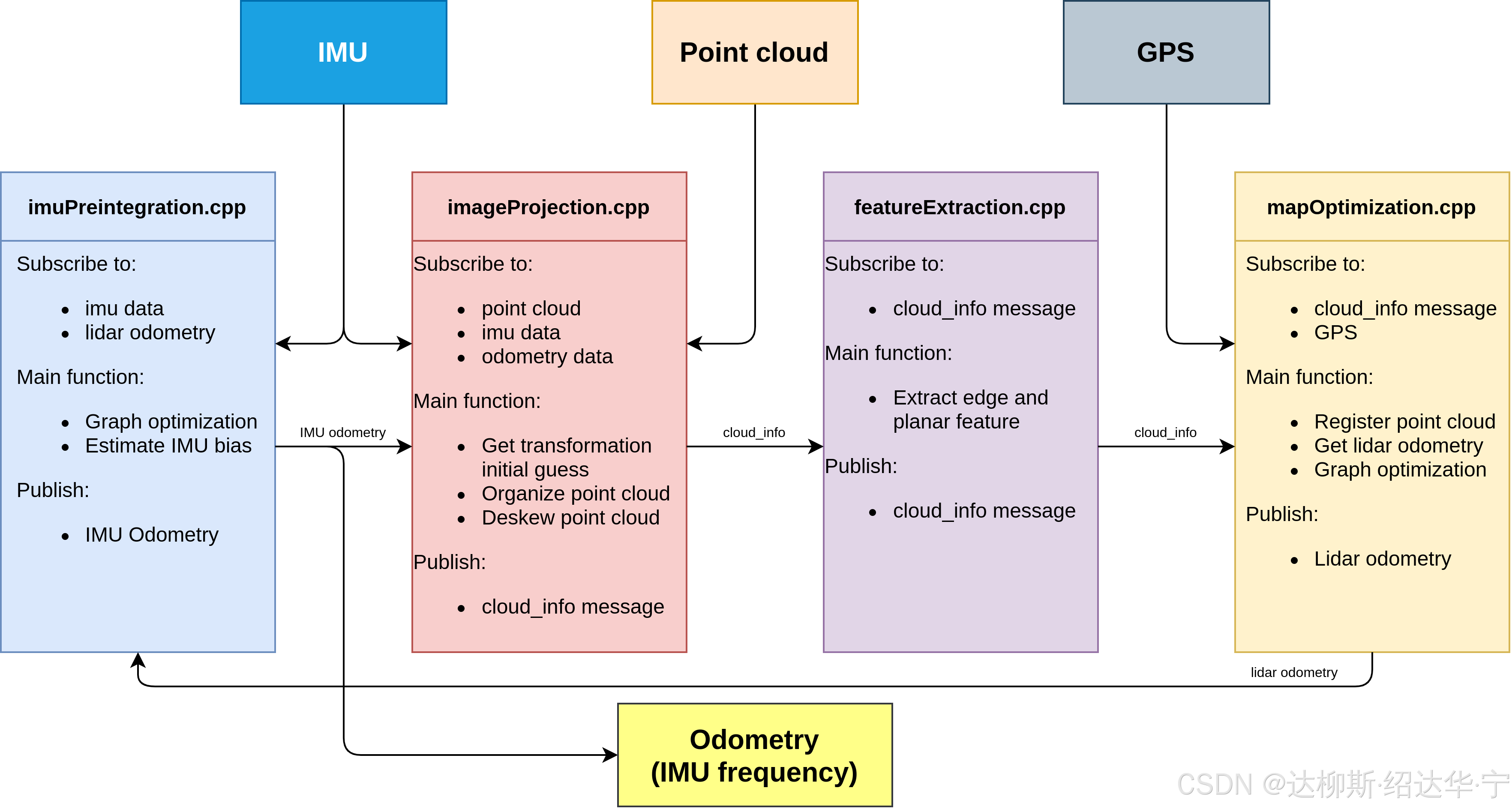
LIO-SAM 是一個基于因子圖優化的激光雷達-慣性導航里程計(LiDAR-Inertial Odometry, LIO)的開源 SLAM 框架。它結合了激光雷達點云與IMU 數據,通過優化算法(GTSAM)進行高精度定位和建圖,特別適用于動態環境和運動畸變補償。
LIO-SAM 主要用于:
-
點云去畸變補償(消除 LiDAR 在運動中的扭曲)
-
實時激光 SLAM(局部里程計 + 全局地圖優化)
-
自動駕駛、無人機、機器人導航等場景
研究背景
LOAM是目前為止激光里程計(LO)領域最經典最廣泛使用的方法。但是它存在一個問題,就是它直接存儲全局體素地圖而不是局部地圖,從而很難執行回環檢測以修正漂移,或者組合GPS(提供絕對位置)等測量進行位姿修正。并且體素地圖的使用效率會隨時間降低。為了克服該問題,作者只獨立地存儲每個關鍵幀的特征,而不是在位姿估計完成后就將特征加入到全局地圖中。
另一方面,IMU和LiDAR的聯合位姿估計已經被廣泛研究,大致分為兩類。第一類是松耦合的方法,例如LOAM和LeGO-LOAM中使用IMU去除LiDAR點云的運動畸變,以及[8]-[12]使用EKF整合LiDAR和IMU的測量。第二類是緊耦合的方法,例如R-LINS[15],使用誤差狀態卡爾曼濾波器迭代地修正機器人的位姿估計,再比如LIOM [16]聯合優化LiDAR和IMU測量。但是LIOM一次性處理所有測量,因此不能實時運行。而本文也屬于緊耦合的激光-慣性里程計方法,只是采用了因子圖優化而不是濾波的方法。
LOAM 主要基于 激光點云特征匹配 來估計位姿,每一幀都會根據上一幀的位姿進行增量更新。但這種方法會導致:
-
短期誤差累積:每一幀匹配的誤差會逐步積累,導致位姿逐步偏移。
-
長時間運行后誤差顯著:如果機器人或無人車長時間運行,沒有全局優化,就可能出現位置漂移,使得建圖產生錯位。
回環檢測:當機器人/無人車回到某個 曾經到達的地方,通過匹配當前點云和歷史點云,可以發現 當前估計的位姿和真實位姿的偏差。
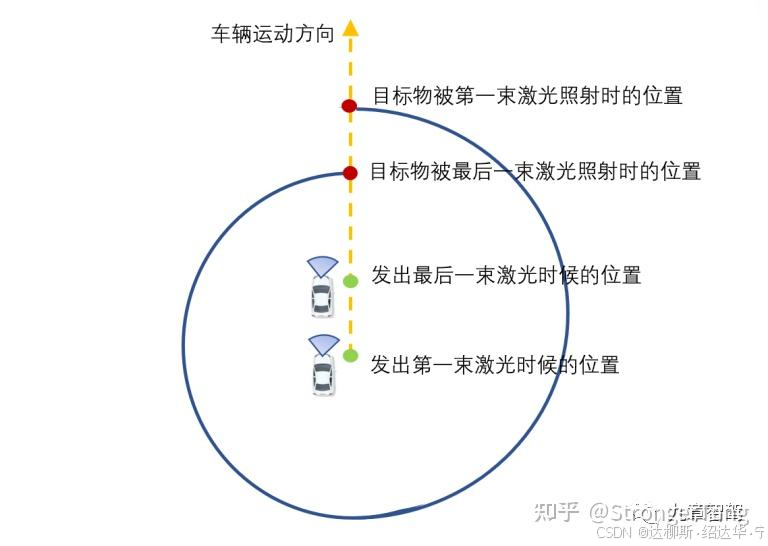
1. LIO-SAM 運動畸變補償原理
LiDAR 由于逐點掃描,每個點的采集時間不同,因此在車輛運動時,同一幀點云可能包含不同時間的位置信息,導致點云扭曲(Motion Distortion)。
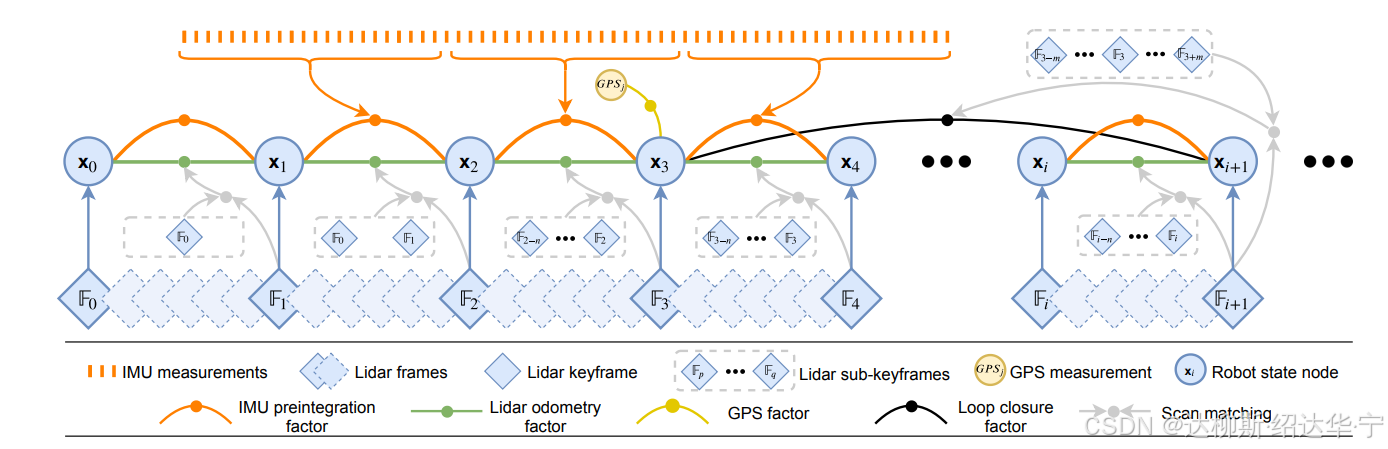
圖2展示了LIO-SAM的因子圖。圖中主要包含四種因子。第一種是IMU預積分因子(橙色),由兩個相鄰關鍵幀之間的IMU測量積分得到。第二種是激光里程計因子(綠色),由每個關鍵幀和之前n個關鍵幀之間的幀圖匹配結果得到。第三種是GPS因子(黃色),由每個關鍵幀的GPS測量得到。第四種是回環因子(黑色),由每個關鍵幀和候選回環關鍵幀的時序相鄰的2m+1個關鍵幀之間的幀圖匹配得到。
因子圖是什么?
因子圖是一種概率圖模型,它用于優化機器人在不同時間步的位姿(Position & Orientation),使其符合傳感器觀測數據的約束。在LIO-SAM中,因子圖的優化由 iSAM2(增量平滑和映射)算法完成。
因子圖的本質:
變量(節點):表示待優化的機器人關鍵幀位姿(位置、方向)。
約束(因子):連接不同變量的觀測數據,提供優化條件。
IMU預積分因子(橙色)
數據來源:IMU傳感器(慣性測量單元)。
作用:利用IMU數據,估計兩個相鄰關鍵幀之間的位移和旋轉。
原理:
由于IMU可以高頻率提供加速度和角速度信息,因此可以通過 數值積分 來推算位姿變化。
但單獨使用IMU會導致 漂移(drift),因此需要與其他傳感器(如Lidar)進行融合校正。
激光里程計因子(綠色)
數據來源:激光雷達點云的匹配結果(幀間匹配)。
作用:通過點云匹配計算關鍵幀之間的位姿變換,提高里程計的精度。
原理:
LIO-SAM在每個關鍵幀與前 n 個關鍵幀之間進行點云匹配,計算相對位姿變化。
這個因子提供了 短時間尺度的幾何約束,用于修正IMU的漂移。
GPS因子(黃色)
數據來源:GPS 傳感器。
作用:提供全局定位信息,防止長期漂移。
原理:
GPS測量的是絕對坐標(經緯度或UTM坐標),可以為因子圖提供全球位置信息。
由于GPS可能存在噪聲(如城市環境中的多路徑效應),LIO-SAM并不直接采用GPS的數值,而是將其作為軟約束,用于優化位姿。
回環因子(黑色)
數據來源:基于激光雷達點云的回環檢測(Loop Closure)。
作用:當機器人經過曾經到達過的地方,檢測并校正累積漂移,提高長期建圖精度。
原理:
通過 掃描匹配(Scan Matching),檢測當前關鍵幀是否與歷史關鍵幀匹配。
如果匹配成功,則添加一個回環因子,提供全局幾何約束,用于修正誤差。
LIO-SAM使用了 2m+1 個關鍵幀 進行匹配,以確保匹配穩定性。
因子圖優化(iSAM2)
LIO-SAM使用 iSAM2(增量平滑和映射)算法進行因子圖優化。
iSAM2的特點:
通過增量更新的方式,避免每次重新計算整個因子圖,提高計算效率。
只在新增關鍵幀時進行局部優化,保證了實時性。
結合 IMU、Lidar、GPS、回環檢測 的多傳感器信息,提高位姿估計的精度和魯棒性。
2.? 核心思路及步驟
LIO-SAM 通過IMU 預積分(IMU Pre-integration),將 IMU 計算出的運動軌跡與 LiDAR 點云的時間戳對齊,從而補償 LiDAR 運動導致的畸變。核心思路如下:
步驟 1:獲取 LiDAR 和 IMU 數據
-
LiDAR 點云幀(Scan):包含多個點,每個點有自己的時間戳。
-
IMU 數據(慣性測量):
-
加速度計(Acceleration)
-
陀螺儀(Gyroscope)
-
角速度 & 線速度
-
-
時間同步:確保 IMU 與 LiDAR 的時間戳對齊(通常用硬件同步,或軟件插值處理)。
步驟 2:IMU 預積分(Pre-integration)
IMU 在兩個時刻之間的測量值(加速度 & 角速度)可以計算增量運動軌跡,即:
-
旋轉增量
-
位置增量
-
速度增量
LIO-SAM 通過 IMU 預積分,在 LiDAR 點云的采集時間范圍內,估計出每個時間點的位姿 ,用于運動畸變補償。
步驟 3:將點云變換到統一坐標系
-
設
是 LiDAR 采集的某個點
-
設
是該點采集時刻的世界坐標系位姿
-
目標是將所有點轉換到相同時間(通常是當前幀起始時間
):

其中:
-
是補償后的世界坐標
-
是 LiDAR 采集時的局部坐標
-
是掃描開始時刻的位姿
-
-
步驟 4:因子圖優化(Factor Graph Optimization)
LIO-SAM 采用 GTSAM(Factor Graph) 進行位姿優化:
-
通過 IMU 計算短時間位姿變換(高頻)
-
通過 LiDAR 進行回環檢測(低頻)
-
結合 GPS,優化全局地圖
(藍橋杯常考點)—圖論)

)

——大模型解碼常見參數解析)











>)
)
樣式詳解)
)