由于點云不是常規數據格式,通常將此類數據轉換為規則的 3D 體素網格或圖像集合,然后再用神經網絡進行處理。數據表示轉換使生成的數據過于龐大。
PointNet是第一個直接處理原始點云的方法。只有全連接層和最大池化層,PointNet網絡在推理速度上具有強大的領先優勢,并且可以很容易地在CPU上并行化。
應對點云的無序性有三種方案:
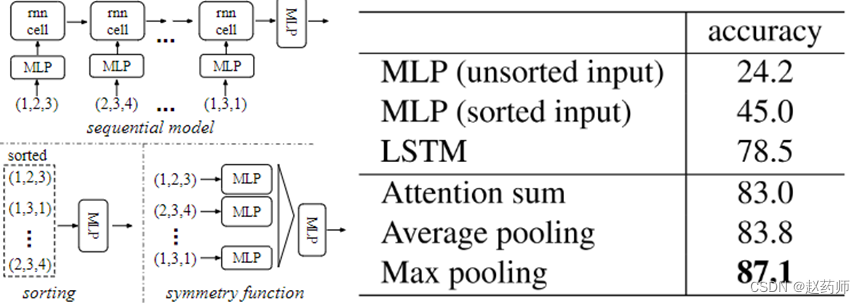
方案1:排序
高維空間的排序,不可穩定。
方案2:假如有N個點,N!種排列訓練一個RNN。
2015年《Order Matters: Sequence to sequence for sets》證明RNN網絡對序列的排序還是有要求的。
方案3:設計對稱函數,因為輸入順序對于對稱函數沒有影響。比如:加法、乘法
PointNet使用的最大池化,是對稱函數。
分類網絡以n個點為輸入,應用輸入和特征變換,然后通過最大池化聚合點特征。輸出是 k 個類的分類分數。

Pointnet網絡的搭建(tensorflow版):
class PointNet(Model):def __init__(self):super(PointNet, self).__init__()self.MLP64 = layers.Conv1D(filters=64, kernel_size=1, strides=1, padding="valid", activation="relu")self.MLP1024 = layers.Conv1D(filters=1024, kernel_size=1, strides=1, padding="valid", activation="relu")self.Dense10 = layers.Dense(10, activation="softmax")def call(self, inputs, training=None, mask=None):x = self.MLP64(inputs)#(Batch,1,1000,64)print(x.shape)x = self.MLP1024(x)#(Batch,1,1000,1024)print(x.shape)x = tf.reduce_max(x, axis=1)#(Batch,1,1024)print(x.shape)x = layers.Flatten()(x)x = self.Dense10(x)#(Batch,10)print(x.shape)return xmodel = PointNet()
input_shape = (1, 1000, 3)
model.build(input_shape)
model.summary()這是我看pointnet論文后復現的分類網絡,由于以前總是對圖像進行2D卷積,這里對輸入的理解還不深刻。采用了(B,H,W,C)的輸入結構,因為是每個點有3個特征,所以將其處理為(B,1,W,C)的結構。但后期發現其比較復雜,所以改進了一下,使用(B,Len,C)的輸入結構。
在深度學習中,處理點云數據(Point Cloud Data)或3D形狀數據與傳統的2D圖像數據有所不同。
原始輸入結構: (B, H, W, C)
- B:代表批次大小(Batch Size),即一次輸入到網絡中的樣本數量。
- H?和?W:在2D圖像中,它們分別代表圖像的高度(Height)和寬度(Width)。但在處理點云數據時,由于點云本質上是一組無序的點集合,所以這里的 H 和 W 可能并不是直觀意義上的“高度”和“寬度”。在某些情況下,它們可能被用來表示某種形式的網格化點云,但這并不是PointNet的初衷。
- C:代表通道數(Channels),對于RGB圖像來說,C=3(紅、綠、藍)。但在點云數據中,每個點可能有多個特征,比如三維坐標(x, y, z)以及其他屬性(如顏色、密度等)。
轉換為 (B, 1, W, C)
- 將 H 設置為 1 可能是為了嘗試將點云數據強制適配到更常見的4D張量結構(即 (B, H, W, C)),但這并不是處理點云數據的最佳方式。因為點云數據中的點是無序的,并且沒有固定的網格結構。
改進后的輸入結構: (B, Len, C)
- B:仍然代表批次大小。
- Len:代表每個樣本中點的數量(Length of points)。這是處理點云數據的更自然的方式,因為它直接反映了點云數據的特點——即一組無序的點集合。
- C:仍然代表每個點的特征通道數。
使用 (B, Len, C) 的輸入結構可以更直接地處理點云數據,并且符合PointNet的設計初衷。
def Point_MLP(inputs, num_filters, use_bn=True, activation='relu'):x = layers.Conv1D(num_filters, kernel_size=1, activation=activation, padding='valid')(inputs)if use_bn:x = tf.keras.layers.BatchNormalization()(x)x = tf.keras.layers.Activation(activation)(x)return xdef Model_Point(point_num, feature_num, mode):inputs = layers.Input(shape=(point_num, feature_num))x64 = Point_MLP(inputs, 64) #(B,N,64)x512 = Point_MLP(x64, 512)x1024 = Point_MLP(x512, 1024) #(B,N,1024)gloable = tf.reduce_max(x1024, axis=1) #(None, 1024)if mode == "clc":x = layers.Flatten()(gloable)x = layers.Dense(10, activation="softmax")(x)model = Model(inputs=inputs, outputs=x)if mode == "seg":global_feature_tiled = tf.tile(tf.expand_dims(gloable, 1), [1, tf.shape(x512)[1], 1])concatenated_features = tf.concat([x512, global_feature_tiled], axis=2)#concatenated_features 的形狀是 (batch_size, num_points, local_feature_dim + global_feature_dim)model = Model(inputs=inputs, outputs=concatenated_features)return modelPointNet = Model_Point(10000, 3, mode="clc")
PointNet.summary()




 葉子游戲新聞)





)

 Object Pascal 學習筆記---第14章泛型第1節(泛型鍵值對))

)
:文件管理部分)


