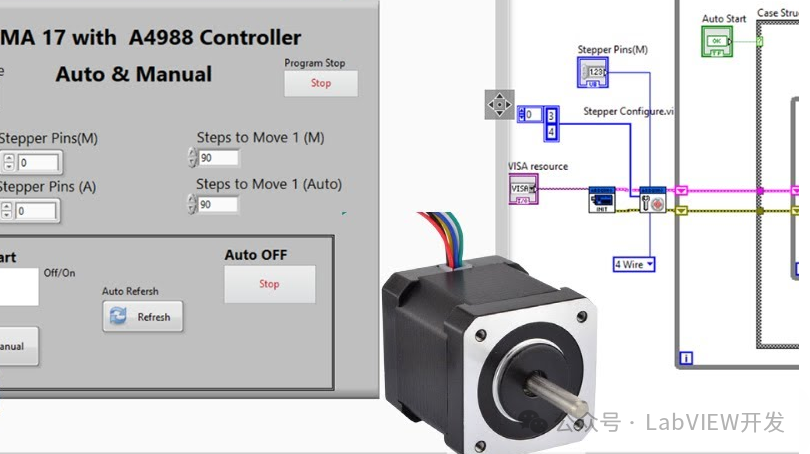
本文介紹了在LabVIEW環境中通過串口控制步進電機的方法,涵蓋了基本的串口通信原理、硬件連接步驟、LabVIEW編程實現以及注意事項。通過這些方法,用戶可以實現對步進電機的精確控制,適用于各種自動化和運動控制應用場景。
步進電機與串口通信簡介
步進電機是一種將電脈沖信號轉換成角位移的執行機構,廣泛應用于自動化控制領域。通過串口(Serial Port)進行控制是一種常見的方法,串口通信是一種逐位傳輸的異步通信方式,具有簡單、成本低等優點。
硬件連接
-
步進電機驅動器:
-
選擇合適的步進電機驅動器,該驅動器應具備串口通信功能。
-
-
串口線:
-
使用串口線(如RS-232或USB轉串口)將計算機與步進電機驅動器連接。
-
-
電源:
-
為步進電機和驅動器提供適當的電源。
-
LabVIEW編程實現
1. 初始化串口
-
打開LabVIEW,創建新VI。
-
添加VISA配置VI:
-
打開LabVIEW的“儀器I/O”選項卡,選擇“VISA Configure Serial Port” VI。
-
設置串口號、波特率、數據位、停止位、奇偶校驗等參數。
-
2. 發送命令
-
創建發送數據框架:
-
在“儀器I/O”選項卡中,選擇“VISA Write” VI。
-
將需要發送的步進電機控制指令(如啟動、停止、轉速設置等)轉化為字符串,通過“VISA Write”發送。
-
-
數據格式:
-
確保步進電機驅動器所需的命令格式正確,包括命令前綴、參數和結束符等。
-
3. 接收反饋
-
添加讀取數據框架:
-
在“儀器I/O”選項卡中,選擇“VISA Read” VI。
-
讀取步進電機驅動器的反饋信息,確認命令是否正確執行。
-
-
解析反饋數據:
-
將讀取到的字符串進行解析,獲取有效信息。
-
4. 關閉串口
-
添加關閉串口框架:
-
在“儀器I/O”選項卡中,選擇“VISA Close” VI。
-
在程序結束時,關閉串口,釋放資源。
-
注意事項
-
參數匹配:
-
確保LabVIEW中的串口參數與步進電機驅動器要求的通信參數一致。
-
-
錯誤處理:
-
在LabVIEW程序中添加錯誤處理框架,確保在通信異常時能及時發現并處理。
-
-
電源和接線:
-
確保電源和接線正確,以防止硬件損壞或通信故障。
-
-
命令格式:
-
嚴格按照驅動器手冊中的命令格式發送控制指令,避免因格式錯誤導致通信失敗。
-
通過以上方法,您可以在LabVIEW中實現對步進電機的精確控制,適用于各種自動化和運動控制應用場景。


:和def __init__(self):的區別)

)


)



)
)

---PTA實驗C++)

main函數執行之前和之后的動作)


