文章目錄
- 一·、HC-SR04模塊介紹
- 二、創建工程
- 1.選擇芯片
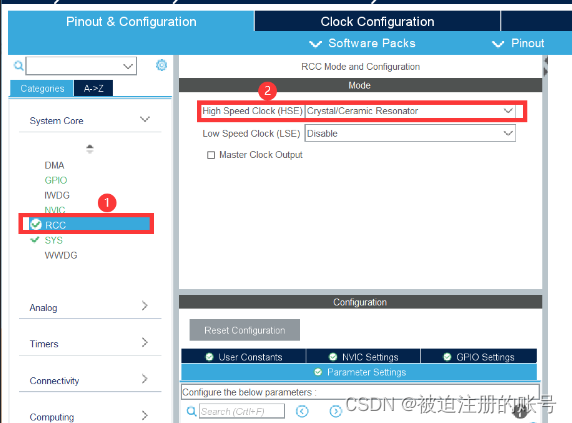
- 2.配置RCC、SY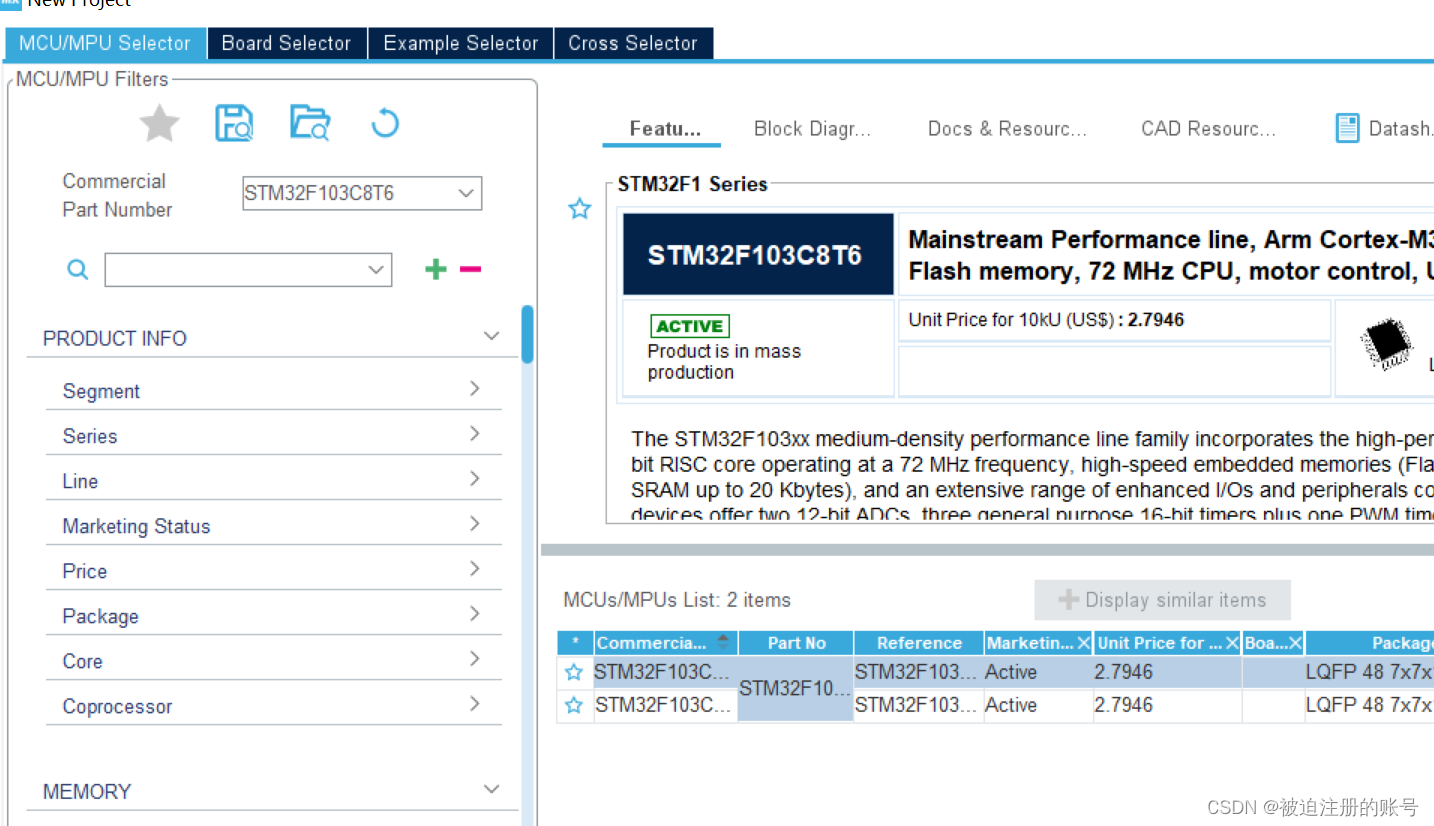
- 3.配置串口1
- 4.配置定時器
- 5.配置GPIO
- 三、Keil代碼
- 1.勾選Use MicroLIB
- 2.創建SR04.c和SR04.h文件
- 3.其他代碼
- 四、效果
- 五、參考資料:
一·、HC-SR04模塊介紹
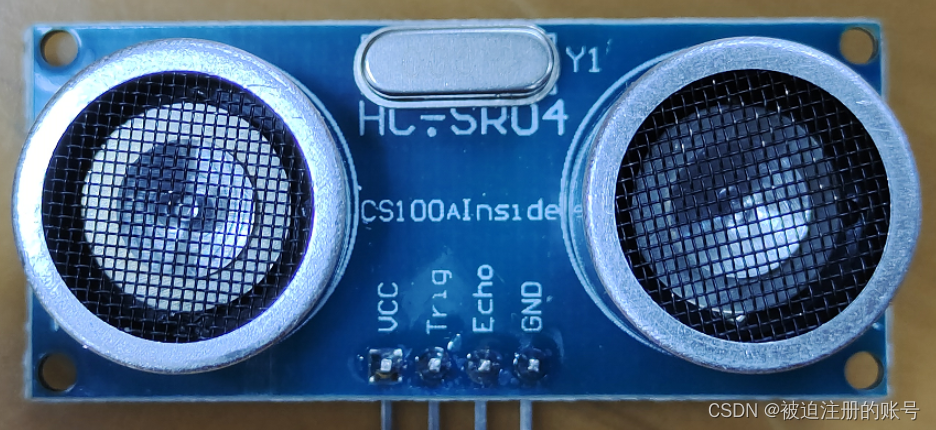
? 超聲波是振動頻率高于20kHz的機械波。它具有頻率高、波長短、繞射現象小、方向性好、能夠成為射線而定向傳播等特點。HC-SRO4是一款尺寸完全兼容老版本,增加UART和IIC功能的開放式超聲波測距模塊,默認條件下,軟件與硬件完全兼容老版本HC-SRO4;可以通過電阻設置成UART或IIC模式。2CM盲區,4.5M典型最遠測距,2.2mA作電流。采用升級解調芯片RCWL-9206,帶UART與IIC功能MCU:使其外圍更加簡潔,工作電壓更寬(3-5.5V),接口功能更多。
- 模塊參數:
①專業解調測距芯片RCWL-9206
②支持GPIO,UART與IIC三種模式接口
③2.2mA工作電流
④2cm最小盲區
⑤2cm-450cm的超寬測量范圍
⑥工作溫度:-10°C-70°c
⑦3V-5.5V寬電壓供電

注:0~40℃聲速誤差7%左右,實際應用時需要考慮溫度影響
-
實驗步驟
1.配置GPIO引腳結構體(Trig,Echo)
2.配置定時器結構體
3.配置定時器中斷結構體
4.開啟時鐘(定時器、GPIO)
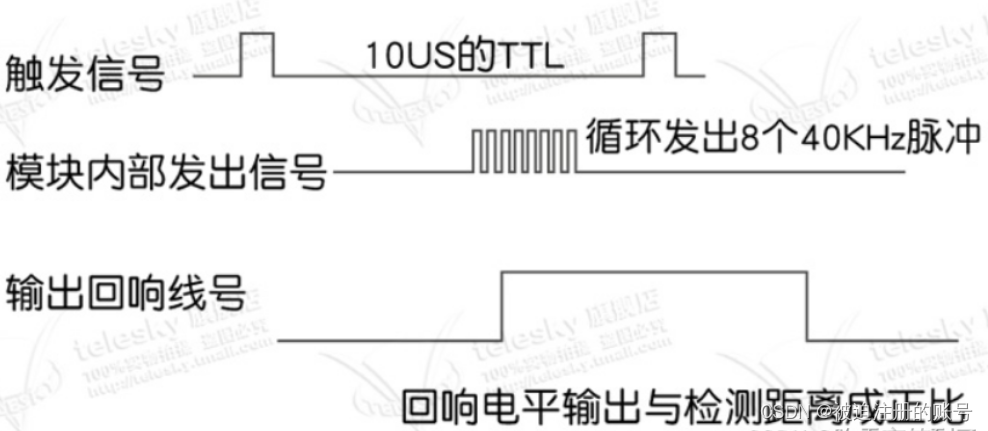
5.Trig引腳輸出高電平(10us以上),然后關閉
6.等待Echo引腳輸出高電平開始,定時器打開->開啟計數器計數
7.等待Echo引腳輸出高電平結束,定時器關閉->停止計數器計數
二、創建工程
1.選擇芯片
打開STM32CubuMax,新建一個項目,選擇芯片
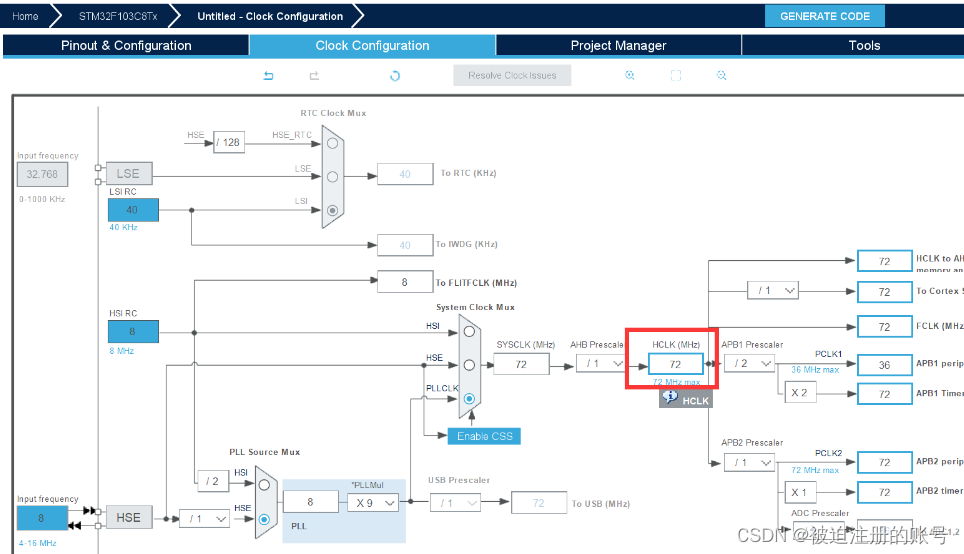
2.配置RCC、SY
S、時鐘樹
rcc
sys

時鐘樹
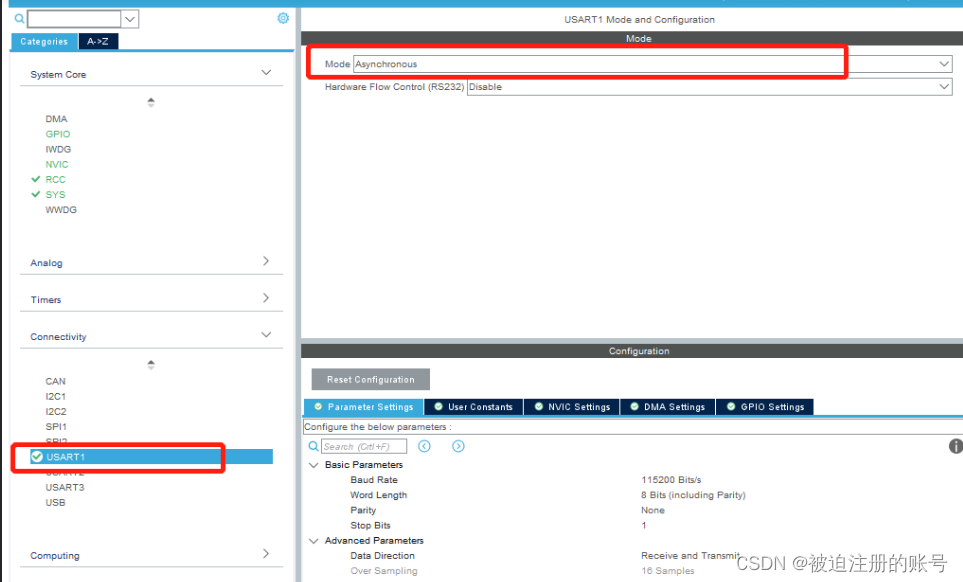
3.配置串口1
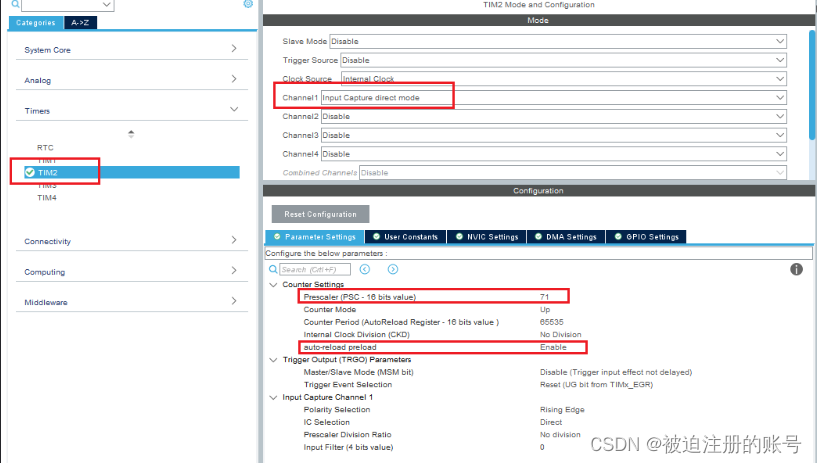
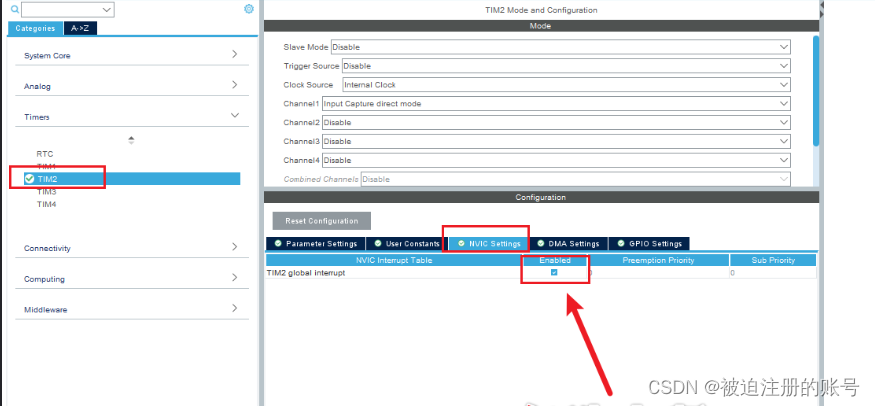
4.配置定時器
5.配置GPIO
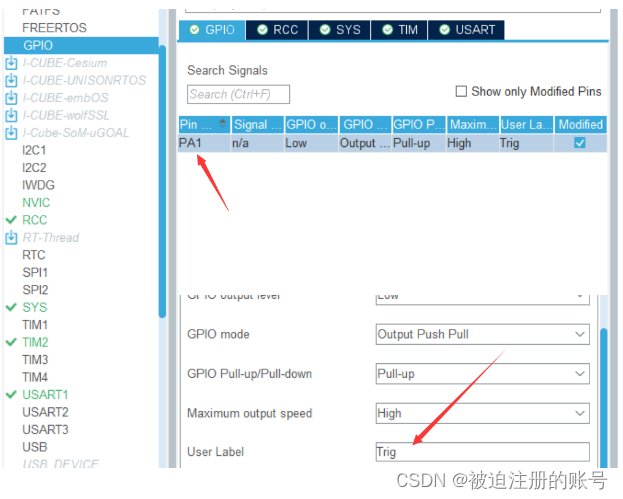
完成后生成keil工程
三、Keil代碼
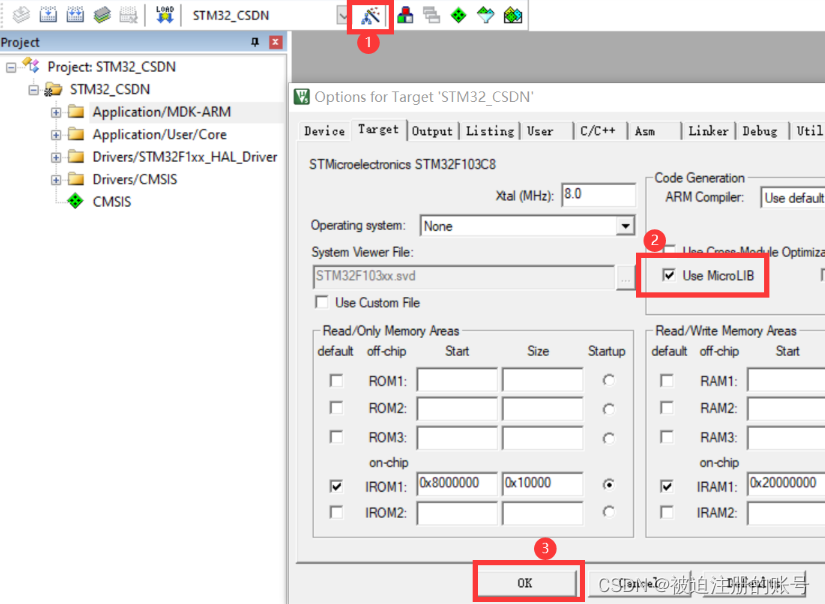
1.勾選Use MicroLIB
2.創建SR04.c和SR04.h文件
SR04.c
#include "SR04.h"float distant; //測量距離
uint32_t measure_Buf[3] = {0}; //存放定時器計數值的數組
uint8_t measure_Cnt = 0; //狀態標志位
uint32_t high_time; //超聲波模塊返回的高電平時間//===============================================讀取距離
void SR04_GetData(void)
{
switch (measure_Cnt){case 0:TRIG_H;delay_us(30);TRIG_L;measure_Cnt++;__HAL_TIM_SET_CAPTUREPOLARITY(&htim2, TIM_CHANNEL_1, TIM_INPUTCHANNELPOLARITY_RISING);HAL_TIM_IC_Start_IT(&htim2, TIM_CHANNEL_1); //啟動輸入捕獲 或者: __HAL_TIM_ENABLE(&htim5); break;case 3:high_time = measure_Buf[1]- measure_Buf[0]; //高電平時間printf("\r\n----高電平時間-%d-us----\r\n",high_time); distant=(high_time*0.034)/2; //單位cmprintf("\r\n-檢測距離為-%.2f-cm-\r\n",distant); measure_Cnt = 0; //清空標志位TIM2->CNT=0; //清空計時器計數break;}
}//===============================================us延時函數void delay_us(uint32_t us)//主頻72M
{uint32_t delay = (HAL_RCC_GetHCLKFreq() / 4000000 * us);while (delay--){;}
}//===============================================中斷回調函數
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)//
{if(TIM2 == htim->Instance)// 判斷觸發的中斷的定時器為TIM2{switch(measure_Cnt){case 1:measure_Buf[0] = HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_1);//獲取當前的捕獲值.__HAL_TIM_SET_CAPTUREPOLARITY(&htim2,TIM_CHANNEL_1,TIM_ICPOLARITY_FALLING); //設置為下降沿捕獲measure_Cnt++; break; case 2:measure_Buf[1] = HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_1);//獲取當前的捕獲值.HAL_TIM_IC_Stop_IT(&htim2,TIM_CHANNEL_1); //停止捕獲 或者: __HAL_TIM_DISABLE(&htim5);measure_Cnt++; }}}
SR04.h
#ifndef __SR04_H
#define __SR04_H
#include "main.h"
#include "tim.h"
#include "stdio.h"#define TRIG_H HAL_GPIO_WritePin(Trig_GPIO_Port,Trig_Pin,GPIO_PIN_SET)
#define TRIG_L HAL_GPIO_WritePin(Trig_GPIO_Port,Trig_Pin,GPIO_PIN_RESET)void delay_us(uint32_t us);
void SR04_GetData(void);#endif
添加進工程
3.其他代碼
usrat.c中添加
/* USER CODE BEGIN 0 */
#include "stdio.h"
/* USER CODE END 0 *//* USER CODE BEGIN 1 */
/*********************************************************
*
*重定義 fputc 函數
*
*********************************************************/
int fputc(int ch,FILE *f)
{HAL_UART_Transmit (&huart1 ,(uint8_t *)&ch,1,HAL_MAX_DELAY );return ch;
}
/* USER CODE END 1 */
main函數
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** <h2><center>© Copyright (c) 2022 STMicroelectronics.* All rights reserved.</center></h2>** This software component is licensed by ST under BSD 3-Clause license,* the "License"; You may not use this file except in compliance with the* License. You may obtain a copy of the License at:* opensource.org/licenses/BSD-3-Clause********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "SR04.h"
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *//* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_TIM2_Init();MX_USART1_UART_Init();/* USER CODE BEGIN 2 *//* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){SR04_GetData( );HAL_Delay(300);/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}
}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT *//************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
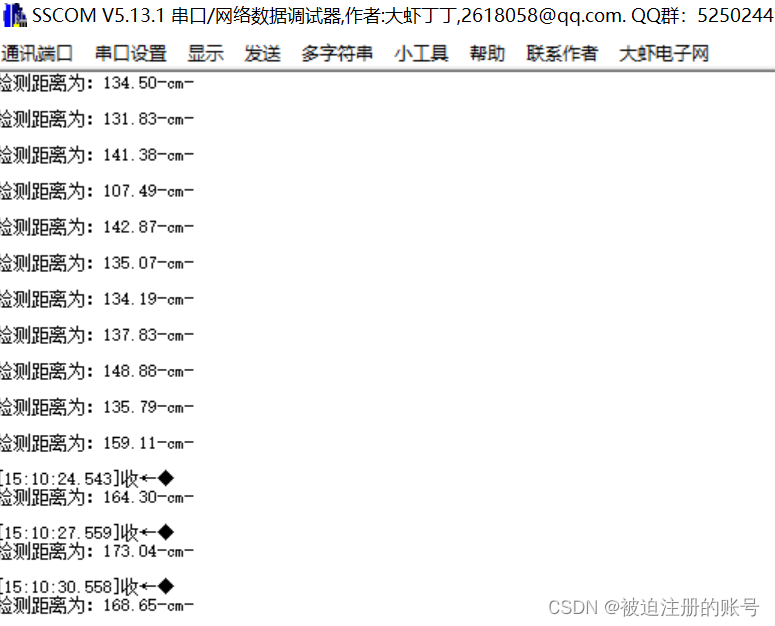
四、效果
HC-SR04模塊接線
VCC接5V
GND接地
TRIG接A1
ECHO接A0
五、參考資料:
[1]https://blog.csdn.net/qq_52215423/article/details/131034232?ops_request_misc=&request_id=&biz_id=102&utm_term=stm32%E8%B6%85%E5%A3%B0%E6%B3%A2%E6%B5%8B%E8%B7%9D&utm_medium=distribute.pc_search_result.none-task-blog-2allsobaiduweb~default-1-131034232.142
[2]https://blog.csdn.net/lwb450921/article/details/123670786?spm=1001.2014.3001.5502
[3]https://blog.csdn.net/weixin_72921448/article/details/127586521?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522171721873616800186519673%2522%252C%2522scm%2522%253A%252220140713.130102334…%2522%257D&request_id=171721873616800186519673&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2alltop_click~default-4-127586521-null-null.142






![[激光原理與應用-94]:電控 - 低噪聲運放的原理](http://pic.xiahunao.cn/[激光原理與應用-94]:電控 - 低噪聲運放的原理)








)



