3-4按鍵控制LED
/** LED.c**/
#include "stm32f10x.h" // Device headervoid LED_Init(void)
{/*開啟時鐘*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //開啟GPIOA的時鐘/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_2;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); //將PA1和PA2引腳初始化為推挽輸出/*設置GPIO初始化后的默認電平*/GPIO_SetBits(GPIOA, GPIO_Pin_1 | GPIO_Pin_2); //設置PA1和PA2引腳為高電平
}/*** 函 數:LED1開啟* 參 數:無* 返 回 值:無*/
void LED1_ON(void)
{GPIO_ResetBits(GPIOA, GPIO_Pin_1); //設置PA1引腳為低電平
}/*** 函 數:LED1關閉* 參 數:無* 返 回 值:無*/
void LED1_OFF(void)
{GPIO_SetBits(GPIOA, GPIO_Pin_1); //設置PA1引腳為高電平
}void LED1_Turn(void)
{if (GPIO_ReadOutputDataBit(GPIOA, GPIO_Pin_1) == 0) //獲取輸出寄存器的狀態,如果當前引腳輸出低電平{GPIO_SetBits(GPIOA, GPIO_Pin_1); //則設置PA1引腳為高電平}else //否則,即當前引腳輸出高電平{GPIO_ResetBits(GPIOA, GPIO_Pin_1); //則設置PA1引腳為低電平}
}/*** 函 數:LED2開啟* 參 數:無* 返 回 值:無*/
void LED2_ON(void)
{GPIO_ResetBits(GPIOA, GPIO_Pin_2); //設置PA2引腳為低電平
}/*** 函 數:LED2關閉* 參 數:無* 返 回 值:無*/
void LED2_OFF(void)
{GPIO_SetBits(GPIOA, GPIO_Pin_2); //設置PA2引腳為高電平
}/*** 函 數:LED2狀態翻轉* 參 數:無* 返 回 值:無*/
void LED2_Turn(void)
{if (GPIO_ReadOutputDataBit(GPIOA, GPIO_Pin_2) == 0) //獲取輸出寄存器的狀態,如果當前引腳輸出低電平{ GPIO_SetBits(GPIOA, GPIO_Pin_2); //則設置PA2引腳為高電平} else //否則,即當前引腳輸出高電平{ GPIO_ResetBits(GPIOA, GPIO_Pin_2); //則設置PA2引腳為低電平}
}
/**Key.c**/
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "stm32f10x_gpio.h"
#include "stm32f10x_rcc.h"void Key_Init(void)
{/*開啟時鐘*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //開啟GPIOB的時鐘/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_11;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure); //將PB1和PB11引腳初始化為上拉輸入
}/*** 函 數:按鍵獲取鍵碼* 參 數:無* 返 回 值:按下按鍵的鍵碼值,范圍:0~2,返回0代表沒有按鍵按下* 注意事項:此函數是阻塞式操作,當按鍵按住不放時,函數會卡住,直到按鍵松手*/
uint8_t Key_GetNum(void)
{uint8_t KeyNum = 0; //定義變量,默認鍵碼值為0if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0) //讀PB1輸入寄存器的狀態,如果為0,則代表按鍵1按下{Delay_ms(20); //延時消抖while (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0); //等待按鍵松手Delay_ms(20); //延時消抖KeyNum = 1; //置鍵碼為1}if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11) == 0) //讀PB11輸入寄存器的狀態,如果為0,則代表按鍵2按下{Delay_ms(20); //延時消抖while (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11) == 0); //等待按鍵松手Delay_ms(20); //延時消抖KeyNum = 2; //置鍵碼為2}return KeyNum; //返回鍵碼值,如果沒有按鍵按下,所有if都不成立,則鍵碼為默認值0
}/**main.c**/
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "LED.h"
#include "Key.h"
uint8_t KeyNum; //定義用于接收按鍵鍵碼的變量int main(void)
{/*模塊初始化*/LED_Init(); //LED初始化Key_Init(); //按鍵初始化while (1){KeyNum = Key_GetNum(); //獲取按鍵鍵碼if (KeyNum == 1) //按鍵1按下{LED1_Turn(); //LED1翻轉}if (KeyNum == 2) //按鍵2按下{LED2_Turn(); //LED2翻轉}}
}
3-5光敏傳感器控制蜂鳴器
/*buzzer.c*/
#include "stm32f10x.h" // Device headervoid Buzzer_Init(void)
{/*開啟時鐘*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //開啟GPIOB的時鐘/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure); //將PB12引腳初始化為推挽輸出/*設置GPIO初始化后的默認電平*/GPIO_SetBits(GPIOB, GPIO_Pin_12); //設置PB12引腳為高電平
}void Buzzer_ON(void)
{GPIO_ResetBits(GPIOB, GPIO_Pin_12); //設置PB12引腳為低電平
}/*** 函 數:蜂鳴器關閉* 參 數:無* 返 回 值:無*/
void Buzzer_OFF(void)
{GPIO_SetBits(GPIOB, GPIO_Pin_12); //設置PB12引腳為高電平
}void Buzzer_Turn(void)
{if (GPIO_ReadOutputDataBit(GPIOB, GPIO_Pin_12) == 0) //獲取輸出寄存器的狀態,如果當前引腳輸出低電平{GPIO_SetBits(GPIOB, GPIO_Pin_12); //則設置PB12引腳為高電平}else //否則,即當前引腳輸出高電平{GPIO_ResetBits(GPIOB, GPIO_Pin_12); //則設置PB12引腳為低電平}
}
/*lightsensor*/
#include "stm32f10x.h" // Device headervoid LightSensor_Init(void)
{/*開啟時鐘*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //開啟GPIOB的時鐘/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure); //將PB13引腳初始化為上拉輸入
}uint8_t LightSensor_Get(void)
{return GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_13); //返回PB13輸入寄存器的狀態
}
/*main.c*/
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "Buzzer.h"
#include "LightSensor.h"int main(void)
{/*模塊初始化*/Buzzer_Init(); //蜂鳴器初始化LightSensor_Init(); //光敏傳感器初始化while (1){if (LightSensor_Get() == 1) //如果當前光敏輸出1{Buzzer_ON(); //蜂鳴器開啟}else //否則{Buzzer_OFF(); //蜂鳴器關閉}}
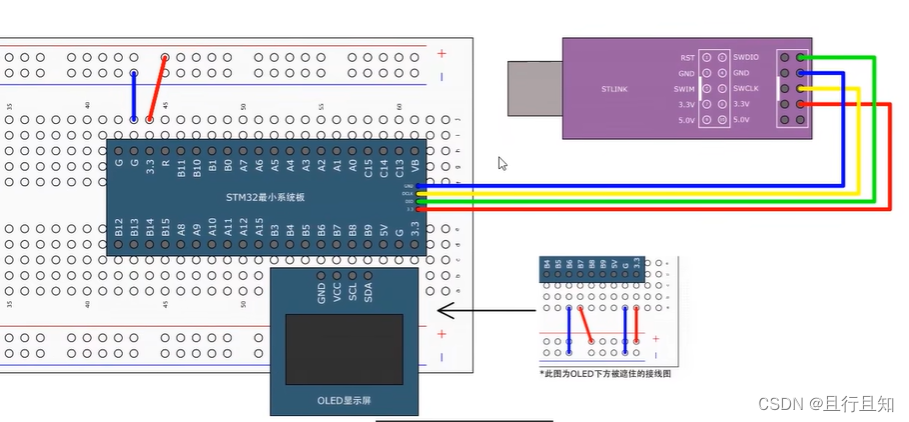
}4-1 OLED調試工具
OLED(Organic Light Emitting Diode):有機發光二極管
OLED顯示屏:性能優異的新型顯示屏,具有功耗低、相應速度快、寬視角、輕薄柔韌等特點
0.96寸OLED模塊:小巧玲瓏、占用接口少、簡單易用,是電子設計中非常常見的顯示屏模塊
供電:3~5.5V,通信協議:I2C/SPI,分辨率:128*64
三種調試方式
OLED的驅動函數
 ?
?
/**OLED.c**/
#include "stm32f10x.h"
#include "OLED_Font.h"/*引腳配置*/
#define OLED_W_SCL(x) GPIO_WriteBit(GPIOB, GPIO_Pin_8, (BitAction)(x))
#define OLED_W_SDA(x) GPIO_WriteBit(GPIOB, GPIO_Pin_9, (BitAction)(x))/*引腳初始化*/
void OLED_I2C_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;GPIO_Init(GPIOB, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;GPIO_Init(GPIOB, &GPIO_InitStructure);OLED_W_SCL(1);OLED_W_SDA(1);
}void OLED_I2C_Start(void)
{OLED_W_SDA(1);OLED_W_SCL(1);OLED_W_SDA(0);OLED_W_SCL(0);
}/*** @brief I2C停止* @param 無* @retval 無*/
void OLED_I2C_Stop(void)
{OLED_W_SDA(0);OLED_W_SCL(1);OLED_W_SDA(1);
}void OLED_I2C_SendByte(uint8_t Byte)
{uint8_t i;for (i = 0; i < 8; i++){OLED_W_SDA(Byte & (0x80 >> i));OLED_W_SCL(1);OLED_W_SCL(0);}OLED_W_SCL(1); //額外的一個時鐘,不處理應答信號OLED_W_SCL(0);
}/*** @brief OLED寫命令* @param Command 要寫入的命令* @retval 無*/
void OLED_WriteCommand(uint8_t Command)
{OLED_I2C_Start();OLED_I2C_SendByte(0x78); //從機地址OLED_I2C_SendByte(0x00); //寫命令OLED_I2C_SendByte(Command); OLED_I2C_Stop();
}void OLED_WriteData(uint8_t Data)
{OLED_I2C_Start();OLED_I2C_SendByte(0x78); //從機地址OLED_I2C_SendByte(0x40); //寫數據OLED_I2C_SendByte(Data);OLED_I2C_Stop();
}
void OLED_SetCursor(uint8_t Y, uint8_t X)
{OLED_WriteCommand(0xB0 | Y); //設置Y位置OLED_WriteCommand(0x10 | ((X & 0xF0) >> 4)); //設置X位置高4位OLED_WriteCommand(0x00 | (X & 0x0F)); //設置X位置低4位
}
void OLED_Clear(void)
{ uint8_t i, j;for (j = 0; j < 8; j++){OLED_SetCursor(j, 0);for(i = 0; i < 128; i++){OLED_WriteData(0x00);}}
}void OLED_ShowChar(uint8_t Line, uint8_t Column, char Char)
{ uint8_t i;OLED_SetCursor((Line - 1) * 2, (Column - 1) * 8); //設置光標位置在上半部分for (i = 0; i < 8; i++){OLED_WriteData(OLED_F8x16[Char - ' '][i]); //顯示上半部分內容}OLED_SetCursor((Line - 1) * 2 + 1, (Column - 1) * 8); //設置光標位置在下半部分for (i = 0; i < 8; i++){OLED_WriteData(OLED_F8x16[Char - ' '][i + 8]); //顯示下半部分內容}
}void OLED_ShowString(uint8_t Line, uint8_t Column, char *String)
{uint8_t i;for (i = 0; String[i] != '\0'; i++){OLED_ShowChar(Line, Column + i, String[i]);}
}/*** @brief OLED次方函數* @retval 返回值等于X的Y次方*/
uint32_t OLED_Pow(uint32_t X, uint32_t Y)
{uint32_t Result = 1;while (Y--){Result *= X;}return Result;
}void OLED_ShowNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{uint8_t i;for (i = 0; i < Length; i++) {OLED_ShowChar(Line, Column + i, Number / OLED_Pow(10, Length - i - 1) % 10 + '0');}
}void OLED_ShowSignedNum(uint8_t Line, uint8_t Column, int32_t Number, uint8_t Length)
{uint8_t i;uint32_t Number1;if (Number >= 0){OLED_ShowChar(Line, Column, '+');Number1 = Number;}else{OLED_ShowChar(Line, Column, '-');Number1 = -Number;}for (i = 0; i < Length; i++) {OLED_ShowChar(Line, Column + i + 1, Number1 / OLED_Pow(10, Length - i - 1) % 10 + '0');}
}void OLED_ShowHexNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{uint8_t i, SingleNumber;for (i = 0; i < Length; i++) {SingleNumber = Number / OLED_Pow(16, Length - i - 1) % 16;if (SingleNumber < 10){OLED_ShowChar(Line, Column + i, SingleNumber + '0');}else{OLED_ShowChar(Line, Column + i, SingleNumber - 10 + 'A');}}
}void OLED_ShowBinNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{uint8_t i;for (i = 0; i < Length; i++) {OLED_ShowChar(Line, Column + i, Number / OLED_Pow(2, Length - i - 1) % 2 + '0');}
}void OLED_Init(void)
{uint32_t i, j;for (i = 0; i < 1000; i++) //上電延時{for (j = 0; j < 1000; j++);}OLED_I2C_Init(); //端口初始化OLED_WriteCommand(0xAE); //關閉顯示OLED_WriteCommand(0xD5); //設置顯示時鐘分頻比/振蕩器頻率OLED_WriteCommand(0x80);OLED_WriteCommand(0xA8); //設置多路復用率OLED_WriteCommand(0x3F);OLED_WriteCommand(0xD3); //設置顯示偏移OLED_WriteCommand(0x00);OLED_WriteCommand(0x40); //設置顯示開始行OLED_WriteCommand(0xA1); //設置左右方向,0xA1正常 0xA0左右反置OLED_WriteCommand(0xC8); //設置上下方向,0xC8正常 0xC0上下反置OLED_WriteCommand(0xDA); //設置COM引腳硬件配置OLED_WriteCommand(0x12);OLED_WriteCommand(0x81); //設置對比度控制OLED_WriteCommand(0xCF);OLED_WriteCommand(0xD9); //設置預充電周期OLED_WriteCommand(0xF1);OLED_WriteCommand(0xDB); //設置VCOMH取消選擇級別OLED_WriteCommand(0x30);OLED_WriteCommand(0xA4); //設置整個顯示打開/關閉OLED_WriteCommand(0xA6); //設置正常/倒轉顯示OLED_WriteCommand(0x8D); //設置充電泵OLED_WriteCommand(0x14);OLED_WriteCommand(0xAF); //開啟顯示OLED_Clear(); //OLED清屏
}
/**main.c**/
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"int main(void)
{/*模塊初始化*/OLED_Init(); //OLED初始化/*OLED顯示*/OLED_ShowChar(1, 1, 'A'); //1行1列顯示字符AOLED_ShowString(1, 3, "HelloWorld!"); //1行3列顯示字符串HelloWorld!OLED_ShowNum(2, 1, 12345, 5); //2行1列顯示十進制數字12345,長度為5OLED_ShowSignedNum(2, 7, -66, 2); //2行7列顯示有符號十進制數字-66,長度為2OLED_ShowHexNum(3, 1, 0xAA55, 4); //3行1列顯示十六進制數字0xA5A5,長度為4OLED_ShowBinNum(4, 1, 0xAA55, 16); //4行1列顯示二進制數字0xA5A5,長度為16//C語言無法直接寫出二進制數字,故需要用十六進制表示while (1){}
}













)




