一、用戶主界面CCD參數設置
通過主界面CCD參數設置,學習如何操作計算相機中心與電批中心的偏移量,以及相機標定的功能。
?1、相機中心與電批中心的偏移量計算
1.1、在用戶主界面點擊CCD參數按鈕,進入CCD設置界面。
? ? 主界面

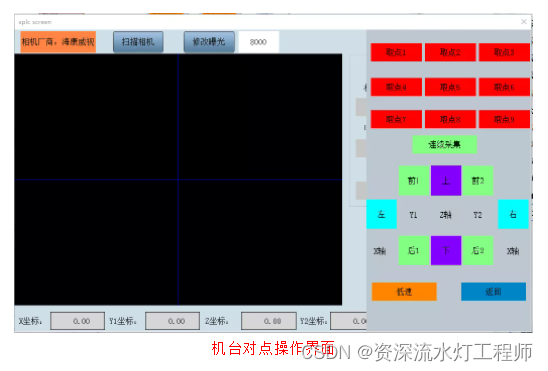
CCD參數設置界面
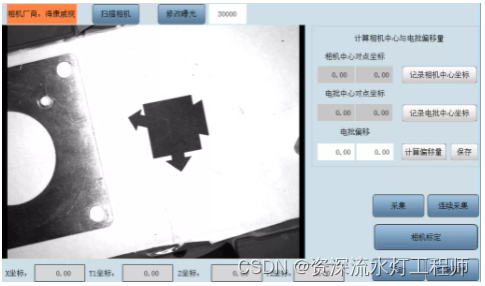
1.2、在CCD參數設置界面頂部區域設置相機相關參數。

如上圖所示,可以知道當前掃描的相機廠商和相機曝光情況。首先點擊【掃描相機】,將重新掃描相機,然后設置完當前相機的曝光參數后,最后點擊【修改曝光】就可將輸入框的數據設置到相機的曝光參數中,至此相機的參數設置完畢。
1.3、計算相機中心和電批中心的偏移量。

1.4、計算相機中心和電批中心的偏移量步驟:
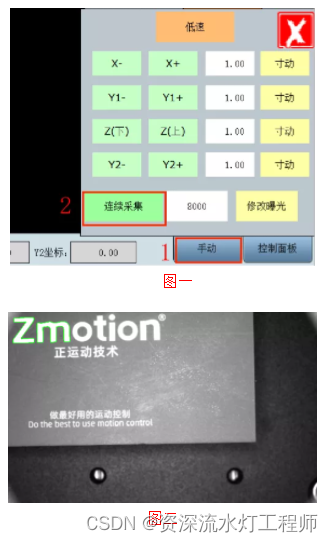
? ? 1.4.1、首先點擊相機【連續采集】模式,然后點擊【手動】按鈕彈出手動調試機臺移動的界面,移動機臺讓相機中心藍色十字線對準機臺上的某點(如上圖i字母所示),最后點擊【記錄相機中心坐標】按鈕,至此相機中心坐標位置記錄完畢。


1.4.2、首先點擊【手動】按鈕彈出手動調試機臺移動的界面,移動機臺使電批中心對準之前相機中心對準的點(如上圖所示的i點),然后點擊【記錄電批中心坐標】按鈕,至此電批中心坐標位置記錄完畢。

1.4.3、點擊【計算偏移量】按鈕,即可完成偏移量的計算。
●注意:在遇到對點不精確時,會使計算出來的偏移量不準確。此時可以返回用戶主界面,點擊【配方管理】按鈕手動修改偏移量即可生效。

2、相機采集與相機標定
2.1、相機采集設置。
2.1.1、點擊【采集】可采集一張照片,點擊【連續采集】將連續采集照片,如果打開連續采集模式圖片的顯示界面會有一個藍色的十字中心線。

2.1.2、點擊【停止采集】可停止連續采集。

2.2、選擇相機標定模式。
? ? 點擊【相機標定】可彈出相機標定方式選擇界面,如下:

? 2.2.1、選擇自動標定模式。(推薦使用自動標定此標定方法操作更便捷)

自動標定步驟:
? ? A.點擊【手動】按鈕并打開相機的【連續采集】模式,手動控制機臺移動,使Mark點/形狀模板在相機視野的左上角區域如圖二所示:(不同機臺系統坐標系方向可能不一樣,這時候可能需要移動Mark點/形狀模板到右上角或者右下角之類的,只要保證自動標定過程中,機臺自動移動九個位置時Mark點/形狀模板始終在相機視野范圍內即可)
?B.點擊【0、顯示ROI】按鈕,彈出ROI選擇矩形框,拖動綠色矩形ROI框將需要進行學習模板的區域框選起來,如圖二所示:

? ? C.點擊【1、創建形狀模板】進入形狀模板創建界面,如圖二所示。

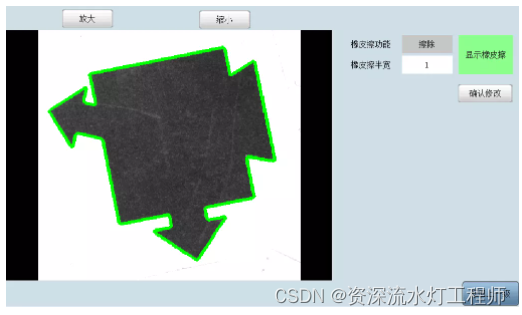
?形狀模板創建步驟:
?A、點擊橡皮擦功能“擦除”或“恢復”后,之后再點擊【顯示橡皮擦】按鈕可以使用鼠標在畫面中對著邊緣輪廓進行擦除或者恢復,下圖中黑色部分為被擦除,綠色部分為正在學習的形狀模板。

B、修改完模板后,點擊【確認修改】按鈕,最后點擊【返回上一級】按鈕,返回自動標定設置界面。
C、根據Mark點/形狀模板在哪個Y軸平臺上面,在相機自動標定界面的標定步驟點擊【2、選擇Y軸:Y1/Y2】按鈕進行切換。如果物體在Y1平臺上面則不需要切換。
D、填寫合適的X/Y軸間距(間距:機臺自動走九個位置進行9次拍照學習形狀模板/mark點時,機臺XY每次拍照移動的間隔),然后點擊【3、開始自動標定】開始標定,等待標定OK窗口彈出,標定OK后,最后點擊【保存標定系數】進行保存。

●自動標定注意事項:首先所選擇的Mark點要輪廓清晰,其次的話是9次拍照都要能拍到Mark點。至此,相機自動標定完成。
?2.2.2、選擇手動標定模式。
? ? 原理:輸入九個mark點圖像坐標和實際坐標的對應點,計算像素坐標系統與實際坐標系統的校準矩陣系數。
? ? 首先在CCD參數設置界面采集一張九點標定板的圖片,之后點擊【相機標定】按鈕,選擇【手動標定】模式。

標定參數設置:
? ?標定類型:
? ? 線性坐標系標定:這是一種兩個坐標系之間的坐標轉換關系的標定,當相機平面與拍照平面垂直且鏡頭無畸變時,可用此方法;
? ? 非線性坐標系標定:這是一種兩個坐標系之間的坐標轉換關系的標定,當相機平面與拍照平面不垂直且鏡頭無畸變時,可用此方法;
? ? 畸變標定:由于透鏡設計的復雜性和工藝水平等因素的影響,實際透鏡成像系統產生所謂的鏡頭畸變,常見的如徑向畸變、切向畸變等,相機標定過程就是確定相機的幾何模型和光學參數,當相機平面與拍照平面不垂直且鏡頭存在畸變時,可用此方法。
? ?對比度:增強圖像邊緣和局部對比度,以當前像素為中心,按照設定的比率和周圍像素進行局部對比度增強運算。
? ?極性:獲取九點標定版圓點的極性,非黑即白。
? ?最小面積:圓點最小像素面積范圍。
? ?最大面積:圓點最大像素面積范圍。
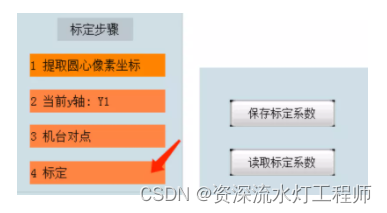
? ? 手動標定步驟:
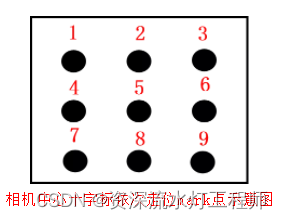
? ? A.點擊標定步驟【1提取圓心像素坐標】按鈕,提取采集的九點標定板圖像上的九個圓心像素坐標。
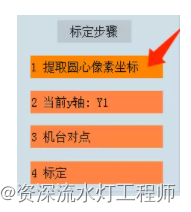
?B.根據九點標定板在哪個Y軸平臺上面,則在相機手動標定界面的標定步驟點擊【2當前Y軸:Y1】按鈕進行切換Y1/Y2軸。如果物體在Y1平臺上面則不需要切換。
?C.點擊【機臺對點】,進入手動調試讓機臺帶動相機中心藍色十字標分別移動到相對應九點標定板的9個mark點,取點的實際坐標。
? 機臺取點操作步驟:
? ? 首先點擊【連續采集】按鈕,操作機臺帶動相機中心讓藍色十字標移動到對準九點標定版的第一個圓心的中心位置。
? ? 之后點擊【取點1】,就會將第一個圓心的實際中心坐標自動寫入相對應的實際坐標table中,并在手動標定界面將世界坐標X,Y的值顯示出來。(需要多次手動操作相機中心依次移動到九個mark點的位置,分別獲取九個mark點坐標)
? ? 取完9個mark點的坐標后,最后點擊【返回】按鈕,返回手動標定界面。
?D.點擊【4標定】開始標定,這時標定完成,最后點擊【保存標定系數】進行保存。至此,相機手動標定完成。
E.相機手動標定操作視頻。
二、視覺糾偏和找孔
上一節主要講述用戶主界面CCD參數設置,學習如何去計算相機中心與電批中心的偏移量,以及相機標定的功能。
? ? 今天,正運動小助手給大家分享一下機器視覺鎖付整體解決方案之視覺糾偏和找孔示教操做設置的步驟。
? 1、視覺糾偏設置
?
? ? 增加視覺糾偏是因為在視覺鎖付過程中樣品容易發生位置偏移,所以正運動技術配合機器視覺技術研發了一套自動糾偏系統,實現了對樣品在進行鎖付時樣品產生位置偏移可實時定位,并且能及時將偏差信號反饋給執行元件,提高了鎖付精度和工作效率。
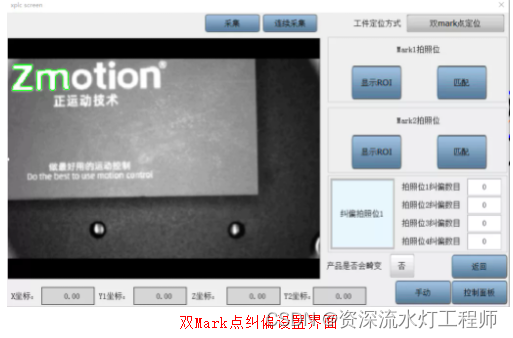
? ? 1.1、在用戶主界面點擊配方管理按鈕,進入配方管理界面,接著點擊MARK點設置,進入視覺糾偏設置界面。

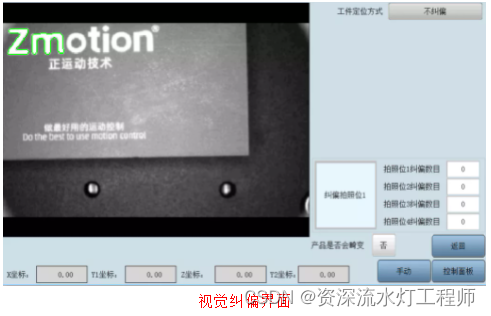
【工件定位方式】:點擊可切換視覺糾偏模式。
? ? 【手動】:點擊可彈出手動操作機臺界面。
? ? 【返回】:點擊可返回到上一級。
? ? 【糾偏拍照位】:當前治具上存在多個不同工件時,可點擊切換當前創建模板的第幾個工件,即糾偏拍照位,這時需要設置多個糾偏拍照位。(例如:當前治具上存在2個不同樣品,需要進行鎖付時,這時需要點擊糾偏拍照位1,創建第一個樣品模板,創建完畢后接著再點擊糾偏拍照位2,創建第二個模板。單個mark點可點擊創建4個不同的工件形狀模板,雙mark點可點擊創建8個不同的工件形狀模板)
? ? 【拍照位糾偏數目】:填寫當前創建的工件模板上有幾個需要進行螺絲鎖付的螺絲孔。
1.2、視覺糾偏模式介紹及設置步驟闡述。
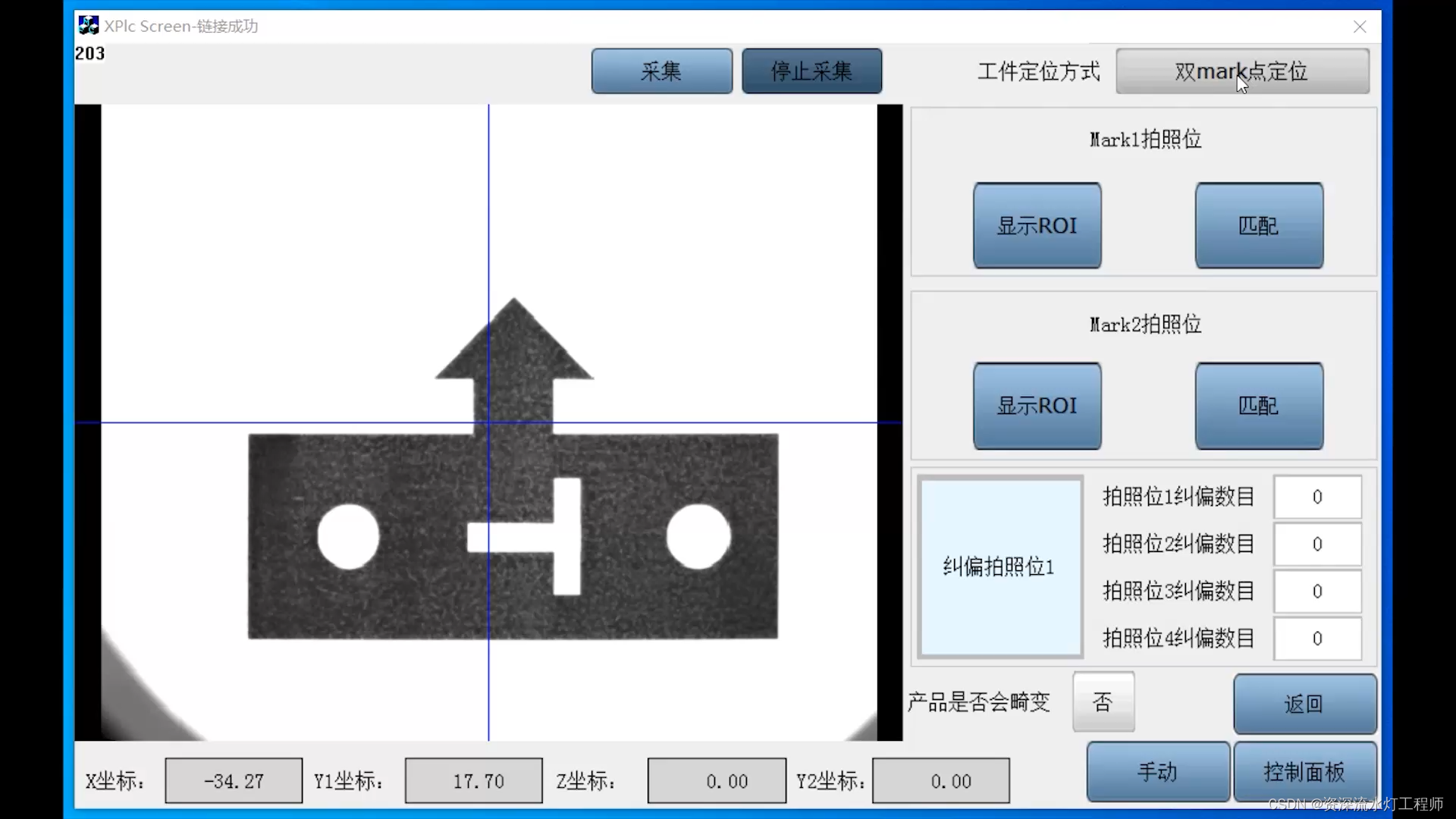
? ? (1)雙Mark點定位糾偏
? ? 定義:如果樣品尺寸較大,拍照視野兼容不下整個工件的所有需要進行鎖付的螺絲孔時,則使用此功能。(需通過移動機臺帶動相機到兩個拍照位進行采圖)
設置步驟:
? ? A.首先點擊【手動】按鈕,移動機臺,使機臺移動到【Mark1拍照位】的位置(要求拍攝該位置下清楚成像的Mark點1),然后點擊【采集】獲取一張照片。
? ? B.點擊Mark1拍照位的【顯示ROI】按鈕,彈出綠色的矩形ROI框,拖動矩形框框選需要創建的形狀模板。

? ? C.點擊Mark1拍照位的【創建模板】,對Mark1創建形狀模板。

D.此時顯示的綠色區域是模板的輪廓,如果需要修改可點擊【顯示橡皮擦】,通過橡皮擦對模板進行修改,修改完后點擊【確認修改】進行保存,然后點擊【返回上一級】。如果不修改直接點擊【返回上一級】即可,至此模板創建糾偏拍照位1的模板創建完成。
? ? E.點擊【手動】按鈕,移動機臺,使機臺運動到【Mark2拍照位】的位置(要求拍攝該位置下清楚成像的Mark點2,即第二個形狀模板),然后點擊【采集】獲取一張照片。接著再進行設置Mark2拍照位的形狀模板,后面操作步驟可參照前面步驟B-C-D。至此雙Mark點定位糾偏設置完畢。
? ? F.視頻演示。
? (2)單Mark點定位糾偏。

設置步驟:
? ? A.先通過【手動】,移動機臺,使機臺運動到【Mark拍照位】的位置(要求拍攝該位置下清楚成像的Mark點),然后點擊【采集】獲取一張照片。
? ? B.點擊【顯示ROI】按鈕,彈出綠色的矩形ROI框,拖動矩形框框選需要創建的形狀模板。
? ? C.點擊【創建模板】,對Mark點創建形狀模板。
?D.此時顯示的綠色區域是模板的輪廓,如果需要修改可點擊【顯示橡皮擦】,通過橡皮擦對模板進行修改,修改完后點擊【確認修改】進行保存,然后點擊【返回上一級】。
? ? E.如果不修改直接點擊【返回上一級】即可,自此單點定位糾偏方式設置完成。
? ? F.視頻演示。
? ? 2、視覺找孔示教操作
視覺找孔示教目的是為了,尋找當前需要進行螺絲鎖付的樣品上需要進行鎖付的螺絲孔。
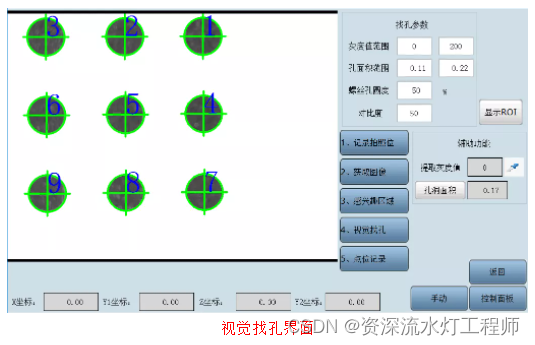
【灰度值范圍】:根據提取出螺絲孔的灰度值,進行設置采集圖像的灰度值上下限,篩選出滿足條件的螺絲孔。
? ? 【孔面積范圍】:根據獲取螺絲孔的孔洞面積,進行孔洞面積范圍上下限設定,篩選出滿足條件的螺絲孔。
? ? 【螺絲孔圓度】:設置螺絲孔的圓度,設置范圍1~100%,設置數值越大,圓度越接近于圓。
? ? 【對比度】:設置圖像的對比度。
? ? 【手動】:點擊可彈出手動操作機臺界面。
? ? 【返回】:點擊可返回到上一級。
? ? 視覺找孔步驟:
? ? 1.點擊【手動】按鈕移動機臺,使機臺移動到合適位置(可以采集到螺絲孔孔洞照片)。然后點擊【1、記錄拍照位】,根據當前拍照位的編號,點擊相應拍照位的【取點】按鈕,對拍照位進行記錄。記錄完后點擊【返回】,返回上一級。(機臺有幾個拍照位,就相應取幾個點)
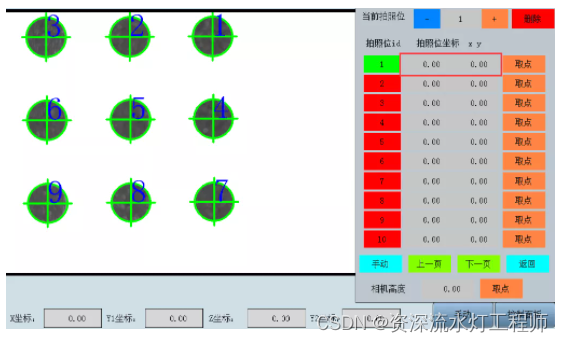
2.然后點擊【2、獲取圖像】,更新一下當前拍照位下的圖像信息。
? ? 3.設置灰度值范圍,首先判斷螺絲孔內灰度值范圍:點擊右側的【灰度值提取器】圖標,設置成提取模式,然后通過鼠標點擊圖片上的位置,將反饋對應像素點的灰度值。接著多取幾個點判斷出螺絲孔內外的灰度值范圍,最后填寫【找孔參數】里面的【灰度值范圍】。

?4.設置孔面積范圍:點擊【顯示ROI】將彈出綠色矩形框,移動到某個螺絲孔框選起來,然后點擊【孔洞面積】按鈕,計算出一個參考面積。最后根據參考面積數值,填寫【找孔參數】里面的【孔面積范圍】,從而實現找對應面積的螺絲孔。

?5.設置螺絲孔圓度和對比度:根據實際找孔情況填寫【找孔參數】里面的【螺絲孔圓度】、【對比度】等參數。【螺絲孔圓度】作為螺絲孔的篩選條件之一,大于該圓度的螺絲孔才能保留。【對比度】是螺絲孔邊界處螺絲孔內外灰度值的差值的絕對值,大于這個差值的才認為是螺絲孔的邊界。
? ? 6.點擊【顯示ROI】按鈕,拖動綠色的矩形ROI框,將所有需要進行鎖付的螺絲孔框選起來,最后點擊【3、感興趣區域】按鈕,至此我們就在該矩形ROI框區域內,進行視覺找孔。
? ? 7.點擊【4、視覺找孔】即可根據找孔參數條件進行視覺找孔。
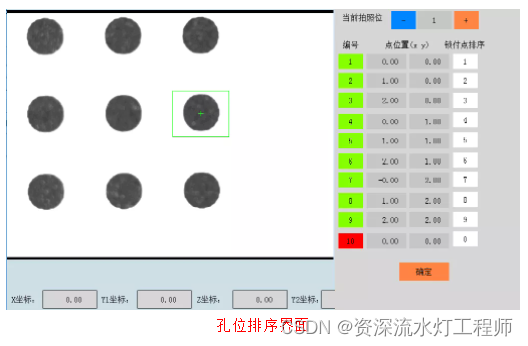
? ? 8.點擊【5、點位記錄】彈出孔位排序界面,在此界面可對螺絲孔洞進行排序和刪除。在鎖付點排序那一列中輸入0-10對孔進行排序,到時候鎖付的時候會先鎖數值小的孔,且如果相關孔的排序數值設置為0時則將不鎖該孔。然后點擊【確定】將孔位位置和排序數據更新到相關的配方文件中。至此,視覺找孔操作完成。
參考文檔:
【機器視覺鎖付整體解決方案】用戶主界面CCD參數設置-正運動技術 (zmotion.com.cn)【機器視覺鎖付整體解決方案】視覺糾偏和找孔示教操作-正運動技術 (zmotion.com.cn)




)











用戶注冊——控制反轉以及Hibernate Validator數據驗證)


