聲音特性
1、響度:人主觀上感覺聲音的大小(俗稱音量),由“振幅”和人離聲源的距離決定,振幅越大響度越大,人和聲源的距離越小,響度越大;
2、音調:聲音的高低,由“頻率”決定,頻率越高音調越高。(頻率單位Hz,赫茲,人耳聽覺范圍20~20000Hz。20Hz以下稱為次聲波,20000Hz以上稱為超聲波)
3、頻率是每秒經過一給定點的聲波數量,它的測量單位為赫茲,是以海因里希·魯道夫·赫茲的名字命名的。此人設置了一張桌子,演示頻率是如何與每秒的周期相關的。
4、1千赫或1000赫表示每秒經過一給定點的聲波有1000個周期,1兆赫就是每秒鐘有1,000,000個周期,等等。
5、音色:又稱音品,波形決定了聲音的音色。聲音因物體材料的特性而不同,音色本身是一種抽象的東西,但波形是把這個抽象直觀的表現。波形不同,音色則不同。不同的音色,通過波形,完全可以分辨的。
6、樂音:有規則的讓人愉悅的聲音。噪音:從物理學的角度看,由發聲體作無規則振動時發出的聲音;從環境保護角度看,凡是干擾人們正常工作、學習和休息的聲音,以及對人們要聽的聲音起干擾作用的聲音。
7、音調,響度,音色是樂音的三個主要特征,人們就是根據他們來區分聲音。
8、當兩個物體碰撞后振動產生聲音時,若兩者振動頻率比為不可化簡的復雜比,如:201:388,那么我們分辨出來會覺得這個聲音刺耳;相反,若兩者振動頻率比為可化簡的簡單比。
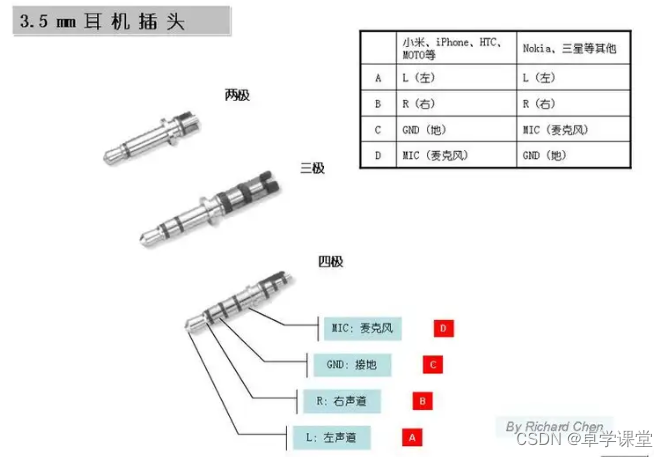
耳機
3.5mm插頭是指直徑為3.5mm的同軸音頻插頭;從端部到根部依次是左聲道、右聲道、地線,其中左聲道常用紅色線皮,右聲道常用白色的;下圖使用的是國際標準;


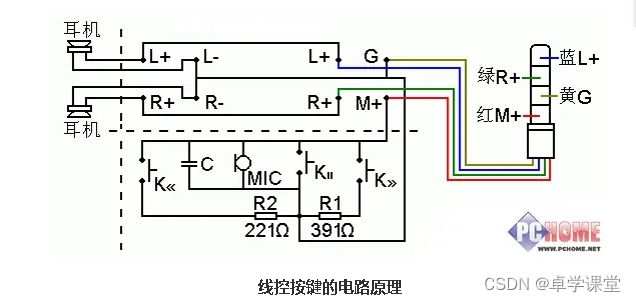
線控類型大致有這幾種,音量滑塊帶麥線控、單鍵帶麥和多鍵帶麥。原理電路圖上不難看出,不同的按鍵下串入了不同的電阻,當按鍵被按下后不同的電阻被接入到了回路當中,麥克風正極接收到的信號也隨之發生改變;手機判斷用戶對線控做了哪些操作都是通過麥克風正極輸入的信號變化來判斷的。
喇叭(揚聲器)
?喇叭(揚聲器)的工作原理
??? 喇叭(揚聲器)的工作原理主要基于電聲換能器件的原理。當交流音頻電流通過揚聲器的線圈(音圈)時,音圈中產生相應的磁場。這個磁場與揚聲器上自帶的永磁體產生的磁場相互作用,產生力使音圈在永磁體的磁場中振動。由于揚聲器的振膜和音圈是連在一起的,振膜也會隨之振動,從而產生與原音頻信號波形相同的聲音。
??? 具體來說,喇叭的底部有一顆磁鐵,其磁場方向固定不可改變。通電的線圈在通電時也能產生磁場,形成“第二顆磁鐵”。由于使用的是交流電,這第二顆磁鐵的磁場方向會隨時間改變。當音圈通電時,其產生的磁場與永磁鐵的磁場相互作用,導致音圈振動。交流信號驅動音圈產生電磁場后,便會在磁體作用下按信號頻率運動,使音圈沿著軸向振動,帶動紙盆使周圍大面積的空氣發生相應的振動,從而將機械能轉換為聲能,發出悅耳的聲音。
日常見到的揚聲器中,95% 都是動圈揚聲器,它一般由驅動,懸掛,支撐等部分構成。

揚聲器主要技術指標
1.功率:最大額定功率是指揚聲器不會引起損壞所能承受的最大功率,最小推薦功率指為產生合適的聲壓所需要的輸入電功率。一般建議提供給喇叭2-3倍的最大額定功率,讓喇叭有足夠的動態,減少失真。
2.頻率響應:頻響曲線反映的是電聲設備在不同頻率上能夠發出多大的聲音。理想中的揚聲器當然是能在人耳聽力范圍,也就是 20 Hz - 20 kHz 上的每個頻率都發出大小一致的聲音
3.標稱阻抗:揚聲器的標稱阻抗用以與功率放大器輸出阻抗相配接的阻抗值,可以為16歐姆、8歐姆、6歐姆、4歐姆。根據音箱的結構,功率放大器的結構,可以靈活的搭配。
4.靈明度:靈明度是喇叭一個非常重要的指標。一般定義為:在揚聲器系統輸入端加上額定功率1W的電信號,在參考1M處產生的聲壓,單位用dB表示。在相同條件下,靈敏度高的揚聲器聽起來聲音較大。靈敏度過高,會導致揚聲器的動態范圍下降;靈敏度過低,則推動需較多功率,要求功率放大器的功率足夠。專業揚聲器的靈敏度一般為98-110dB;高保真揚聲器的在70-98dB 。
5.帶寬(Bandwidth):指揚聲器能夠有效工作的頻率范圍。它表示揚聲器在低頻到高頻的范圍內可以產生正常、清晰的聲音輸出。
6.最大聲壓級(Maximum Sound Pressure Level,Max SPL):它表示揚聲器在最大輸出功率下可以達到的最大聲音強度。它是衡量揚聲器音量輸出能力的參數。
7.失真(Distortion):描述揚聲器在工作過程中產生的非線性畸變或失真情況。失真會導致聲音質量下降,包括諧波失真、交調失真等。
8.指向性(Directivity):表示揚聲器輻射聲能的方向性和范圍。不同類型的揚聲器具有不同的指向性特性,如全向性、單向性、扇形指向性等。
揚聲器的檢測
(1)好壞的判斷
將萬用表置于“Rx1”擋,用紅表筆接音圈(線圈)的一個接線端子,用黑表筆點擊另一個接線端子,若揚聲器能夠發出“咔咔”的聲音,說明揚聲器正常;否則說明揚聲器的音圈或引線開路。
(2)阻抗的估測
揚聲器鐵芯的背面通常有一個直接打印或貼上去的銘牌,該銘牌上一般都標有阻抗的大小,若銘牌脫落導致無法識別它的阻抗時,則需要使用萬用表進行判別。將萬用表置于“Rx1”擋,調零后,測量線圈的電阻,阻值為6.1Ω,將該值乘以1.3 得到的數值為7.93Q,說明被測揚聲器的阻抗為8Q。
(3)極性的判斷
揚聲器必須要按正確的極性連接,否則會因相位失真而影響音質。大部分揚聲器在背面的接線支架上通過標注“+的符號標出兩根引線的正負極性,而有的揚聲器并未標注,為此需要對此類揚聲器的極性進行判別。采用的判別方法主要有電池檢測法和萬用表檢測法兩種
MIC
MIC接口的工作原理
MIC接口將聲音轉化為電信號。當聲音通過麥克風時,麥克風會將其轉化為微弱的電信號。這個過程稱為聲電轉換。然后,這些電信號可以通過線路傳輸到錄音設備或擴音器中,以便進行處理和播放。
駐極體麥克風原理
如圖為歌爾聲學的B4013AM443,ECM駐極體電容傳聲器為將聲音轉換為電信號的單元,轉換后的電信號幅度非常小,經過FET放大之后從正極輸出可使用的聲音信號。

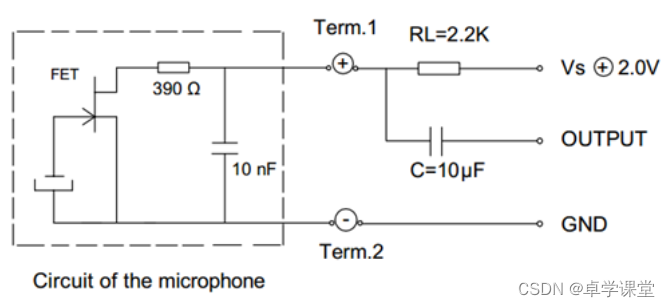
駐極體麥克風單端式電路設計
?如圖,麥克風的偏置電壓2.0V經過一個串聯電阻2.2K接到麥克風的正極,負極直接接GND。2.2K電阻是什么作用:這個電陽給mic里面的FET提供一個直流偏置電壓,讓FET工作在飽和區,完成放大的功能。
由mic的手冊可以知道,MIC消耗的最大電流為500uA,偏置電壓為2V,為了能是FET的輸出有最大的動態范圍,那么Tem1處的電壓最好是偏置電壓的一半,即1V,根據電流為500uA,那么RL=2V/500uA=2K。所以這個電阻最好是2K左右,選取2.2K也差不多吧。
?駐極體麥克風差分式電路設計
如下圖,差分的方式,因為MIC+,MIC-的信號是幅度相同,相位相反的信號,所以,R1和R2必須相等,同上面所說的,考慮到靜態工作點的問題,電流還是500uA,因此R1+R2-2K,所以R1=R2=1K。
有些電路中會看到R1和R2都是2K左右吧,并沒有降低,原因是因為一般MIC的輸出信號也只有200-300mV,動態范圍要求不是很高,所以用2K影響也不大。
值得一提的是,偏置電阻大一些,增益會大些即MIC輸出的音頻的幅度也會大一些。這是由FET放大電路決定。

MIC電路的噪聲問題
可能碰到最多的問題就是MIC電路有噪聲,比如收到wifi干擾等問題,會有滋滋的聲音。噪聲問題可以考慮以下幾個方式處理:
(1)使用差分電路的連接方式,去除共模干擾
(2)在MIC上面并聯焊接10pF-100PF的濾波電容
(3)如果是接線端子引入的,接線端子可用弄成雙絞線的形式
(4)串聯如磁珠濾波
(5)MIC安裝需要到位,并且不能形成諧振腔體?
麥克風的靈敏度高好還是低
?????? 要根據你使用的條件來選擇。如果聲源離麥克風較遠,需用靈敏度高的麥克風;如果聲源離麥克風很近,則用靈敏度低的麥克風。前者能保證拾取聲音信號的靈敏度,后者能有效地降低環境噪音。按照你使用的條件,離麥克風近一點是沒有問題的,所以還是選用靈敏度低一點的好
1 麥克風的分類
1.1、動圈式麥克風(Dynamic Micphone)
原理:基本構造包含線圈、振膜、永久磁鐵三部分。當聲波進入麥克風,振膜受到聲波的壓力而產生振動,與振膜在一起的線圈則開始在磁場中移動,根據法拉第的楞次定律,線圈會產生感應電流。
特性:動圈式麥克風因含有磁鐵和線圈,不夠輕便、靈敏度較低、高低頻響應表現較差;優點是聲音較柔潤,適合用來收錄人聲。
應用:KTV場所。
1.2、電容式麥克風(Condenser?Micphone)
原理:根據電容兩片隔板間距離的改變來產生電壓變化。當聲波進入麥克風,振膜產生振動,使得振動膜和基板之間的距離會隨著振動而改變,于是基板間的電容會變,根據Q=C*V(電容式麥克風中電容極板的電壓會維持一個定值)得到變化的電荷量Q。
特性:靈敏度高,常用于高質量的錄音。
應用:消費電子、錄音室。
1.3、鋁帶式麥克風(Ribbon Micphone)
原理:在磁鐵兩極間放入通常是鋁制的波浪狀金屬箔帶,金屬薄膜受聲音震動時,因電磁感應而產生信號。
1.4、碳精麥克風(Carbon Micphone)
2 兩種常用電容式麥克風的對比
2.1、駐極體電容麥克風(Electret Condenser?Micphone)
原理:駐極體麥克風使用了可保有永久電荷的駐極體物質,不需要再對電容供電。(若駐極體麥克風中內置放大電路,則需要供電)
優點:技術成熟、價格便宜
缺點:體積大,不方便SMT、引線長,造成信號衰減、生產工序多,一致性差、靈敏度不穩定
2.2、微機電麥克風(MEMS Micphone)
原理:微機電麥克風也稱麥克風芯片或硅麥克風,硅麥一般都集成了前置放大器,甚至有些硅麥會集成模擬數字轉換器,直接輸出數字信號,成為數字麥克風。
優點:體積小,可SMT、產品穩定性好
缺點:價格較高
備注:一般情況下,我們把集成了前置放大器或者模擬數字轉換器的麥克風稱為拾音器(pickup)。
3 麥克風的性能參數
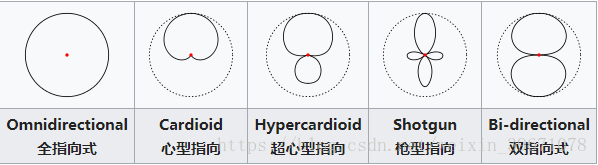
3.1、指向性(Directivity)
指向性描述麥克風對于不同角度聲音的靈敏度,規格上常用如下的polar pattern表示,在每個示意圖中,虛線圓形的上方代表麥克風前方,下方代表麥克風的后方。
3.2、靈敏度級(Sensitivity)
聲壓:指聲波通過某種媒質時,由振動產生的壓強改變量。單位為Pa、μbar。1μbar=0.1Pa。
參考聲壓:P(ref) =?20μPa。
聲壓級(SPL):
例:1Pa聲壓的聲壓級為
靈敏度:指麥克風的開路電壓與作用在其膜片上的聲壓之比。單位為mv/pa、mv/ubar。1mv/ubar = 10mv/pa。

麥克風靈敏度的定義是饋給1pa(94dB)的聲壓時,麥克風輸出端的電壓(dBV)。
所以-30dBV/Pa的麥克風的靈敏度比-42dBV/Pa的麥克要高很多。
MIC靈敏度是指在單位聲壓強度下所產生的信號電強度,用DBV表示。
單位聲壓絕對值為1PA,相對值為94DB(也有用加權的,94DBA),其中基準壓強為2X10-5PA。
現在大多產家是按這個來定義的,所以-40DB的比-30DB的靈敏度高。
MIC靈敏度是固定指標,是指在標準偏置下測出的。產商可改變工藝或者材料來提高。用戶在使用中不可降低,如果用戶偏置不正確,會產生失真和帶寬擠壓,表現為靈敏度降低。
嘯叫問題,應該不是MIC靈敏度問題。因為在HF MODE是半雙工模式,側間會被消除。如果在TEST MODE仍是全雙工所以會正反饋。
消除嘯叫常有,降低聲音強度(SPEAKER輸出),結構調整(MIC和SPEAKER),加MUTE,密封,降噪等方法消除。
參考靈敏度:Mr = 1V/Pa
靈敏度級:
例:1V/Pa靈敏度的靈敏度級為
3.3、信噪比(SNR)
信號與噪聲的比例。

3.4、總諧波失真(THD)
總諧波失真是指輸出信號比輸入信號多出的諧波成分。諧波失真是系統不是完全線性造成的。所有附加諧波電平之和稱為總諧波失真。總諧波失真與頻率有關,一般來說,1khz頻率處的總諧波失真最小,因此不少產品均以該頻率的失真作為它的指標。
公式1:
上式中,符號G表示諧波分量的有效值,它將按要求在表示電流時被I代替,在表示電壓時被U代替,H的值在與限制有關的每一個標準中給出。按照上述定義,THD不包含簡諧波,并且,有一固定的諧波上限。
公式2:
上式中,Q為總有效值,Q1為基波有效值,可代表電壓或電流,按照上述定義,THD包含間諧波和直流分量。
3.5、等效輸入噪聲(EIN)
無外聲場時,僅由傳聲器固有噪聲引起的輸出電壓,可以看作能產生相同有效值輸出電壓的外部聲壓級。
3.6、電源抑制比(PSRR)
電源抑制比(PSRR)是輸入電源變化量(以伏為單位)與轉換器輸出變化量(以伏為單位)的比值,常用分貝表示。
3.7、輸出阻抗(Zout)
)






![告別 Dart 中的 Future.wait([])](http://pic.xiahunao.cn/告別 Dart 中的 Future.wait([]))









)

)