KITTI數據集中真值與標定參數
0. 前言
為了再研KITTI數據集及方便下載文件,特地買了梯子,心疼人民幣QWQ~555
1. KITTI-home
Welcome to the KITTI Vision Benchmark Suite!
我們利用我們的自動駕駛平臺開發新穎的具有挑戰性的真實世界計算機視覺基準。我們感興趣的任務是:立體、光流、視覺里程計、3D目標檢測和3D跟蹤。為此,我們配備了一輛標準旅行車,配有兩臺高分辨率彩色和灰度攝像機。精確的地面實況由Velodyne激光掃描儀和全球定位系統提供。我們的數據集是通過在Karlsruhe卡爾斯魯厄, 在農村地區和高速公路上。每張圖片最多可以看到15輛汽車和30名行人。**除了以原始格式提供所有數據外,我們還為每個任務提取基準。(之前一直沒明白原始數據與各任務數據間關系)**對于我們的每個基準,我們還提供了一個評估指標和這個評估網站。初步實驗表明,在既定基準上排名靠前的方法,例如Middlebury米德爾伯里 . 當從實驗室轉移到現實世界時,表現低于平均水平。我們的目標是減少這種偏見,并通過向社區提供具有新困難的現實世界基準來補充現有基準。

2. KITTI-setup
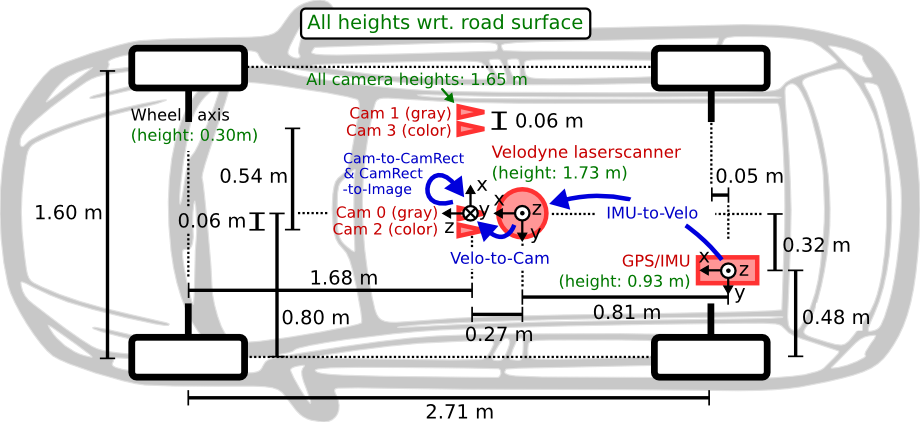
Sensor Setup 傳感器設置
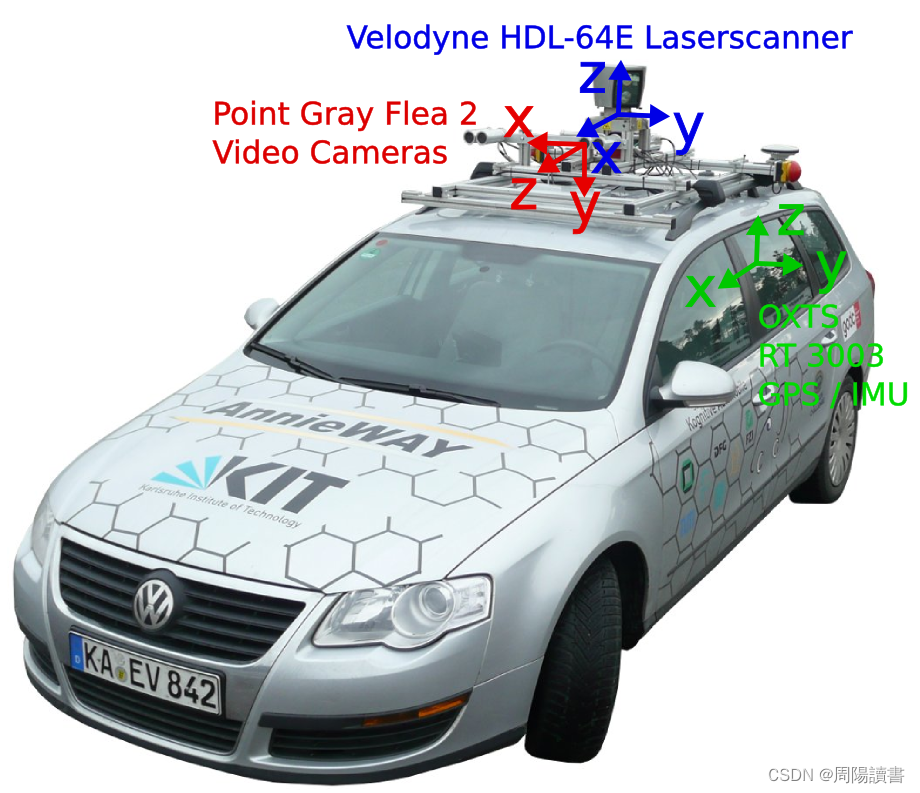
本頁提供了關于我們用來記錄此數據集的記錄平臺和傳感器設置的其他信息。我們的記錄平臺是大眾帕薩特B6,它已被修改為踏板(加速和制動)和方向盤的執行器。數據記錄使用配備RAID系統、運行UbuntuLinux和實時數據庫的八核i7計算機。我們使用以下傳感器:
1 Inertial Navigation System (GPS/IMU): OXTS RT 3003
1慣性導航系統(GPS/IMU):OXTS RT 3003
1 Laserscanner: Velodyne HDL-64E
1激光掃描儀:Velodyne HDL-64E
2 Grayscale cameras, 1.4 Megapixels: Point Grey Flea 2 (FL2-14S3M-C)
2個灰度相機,1.4兆像素:點灰跳蚤2(FL2-14S3M-C)
2 Color cameras, 1.4 Megapixels: Point Grey Flea 2 (FL2-14S3C-C)
2個彩色相機,1.4兆像素:點灰跳蚤2(FL2-14S3C-C)
4 Varifocal lenses, 4-8 mm: Edmund Optics NT59-917
4個變焦鏡頭,4-8毫米:愛特蒙特光學NT59-917
激光掃描儀以每秒10幀的速度旋轉,每個周期捕獲大約100k個點。激光掃描儀的垂直解析度為64。攝像機與接地平面大致水平安裝。攝像機圖像使用libdc的格式7模式裁剪為1382 x 512像素的大小。經過校正,圖像變得稍微小一點。攝像機由激光掃描儀以每秒10幀的速度觸發(當面向前方時),快門時間動態調整(最大快門時間:2毫秒)。我們關于車輛的傳感器設置如下圖所示。請注意,校準文件和開發套件中提供了有關校準參數的更多信息(參見原始數據部分)。
3.KITTI-stereo
Stereo Evaluation
-
Stereo2012 這是我們最初的立體聲評估,稱為“KITTI立體聲”或“KITTI立體聲2012”,發表在我們準備好自動駕駛了嗎?KITTI視覺基準套件(CVPR 2012)。
它由194個訓練場景和195個靜態環境測試場景組成,由立體攝像機拍攝。 -
Stereo2015 這是我們新的立體評估稱為"KITTI立體聲2015",它來自于場景流數據集發表在自動駕駛汽車對象場景流(CVPR 2015)。
它由200個訓練和200個測試場景組成,其



的工具軟件)






--定點數的舍入模式(2)向最臨近值取整nearest)


)





