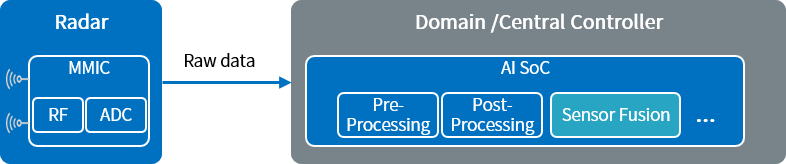
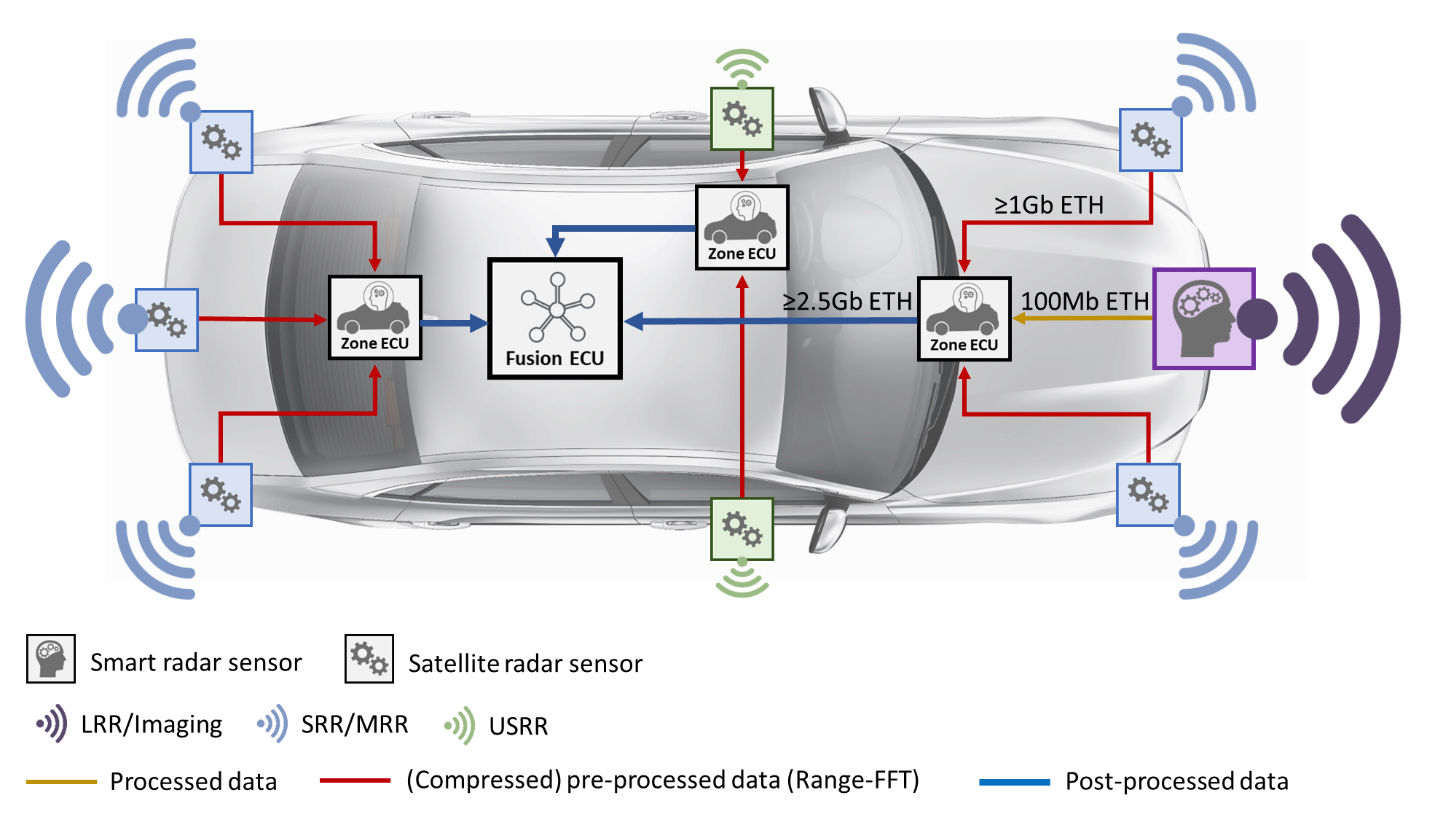
衛星雷達(又稱為分布式雷達)主要講當前雷達的雷達信號處理計算以及雷達目標相關的一些感知算法都遷移到中央域控進行,雷達端基本只負責數據采集,這樣做的影響如下:
-
雷達端成本與功耗降低;
-
雷達端采樣得到的原始數據進入中央域控處理,可以進行RawData級融合算法或者點云級融合算法,得到更多的原始信息;
-
域控端接口成本上升,域控端需要將CAN或者百兆以太網更新為千兆以太網或者Serdes;
-
域控端算力成本上升,域控端需要增加DSP內核,以便對雷達RadarData進行雷達信號處理;
-
對千兆以太網或者Serdes的需求增大;

1、衛星雷達和4D雷達的關系
下表是從4D雷達解決方案套片中摘錄出來,可以看到,分布式衛星雷達,只需要將4D雷達的MMIC拿來用就可以了,但是還有一些差別,三大家也推出了專門的分布式衛星雷達MMIC,這些MMIC中有簡單的DSP,能對RawData進行1DFFT,然后再通過千兆以太網輸出,
NXP
| MMIC or Radar SoC | 說明 |
|---|---|
| TEF82xx(3T4R) | 3T4R的單芯片MMIC,可級聯,需要用Serdes傳輸RawData |
| TEF????(8T8R) | 某8T8R的單芯片MMIC,可級聯,需要用Serdes傳輸RawData |
| SAF86xx(4T4R)輸出1DFFT后數據 | 1Gbps 以太網接口 |
TI
| MMIC or Radar SoC | 說明 |
|---|---|
| AWR2243(3T4R) | 3T4R的單芯片MMIC,可級聯,需要用Serdes傳輸RawData |
| AWR2188(8T8R) | 8T8R的單芯片MMIC,可級聯,需要用Serdes傳輸RawData |
| AWR2544(4T4R)輸出1DFFT后數據 | 1Gbps 以太網接口 |
Infineon
| MMIC or Radar SoC | 說明 |
|---|---|
| CTRX8161(3T4R) | 3T4R的單芯片MMIC,可級聯,需要用Serdes傳輸RawData |
| CTRX8181(4T4R) | 4T4R的單芯片MMIC,不能級聯,需要用Serdes傳輸RawData |
| CTRX8191F(4T4R) | 4T4R的單芯片MMIC,可級聯,需要用Serdes傳輸RawData |
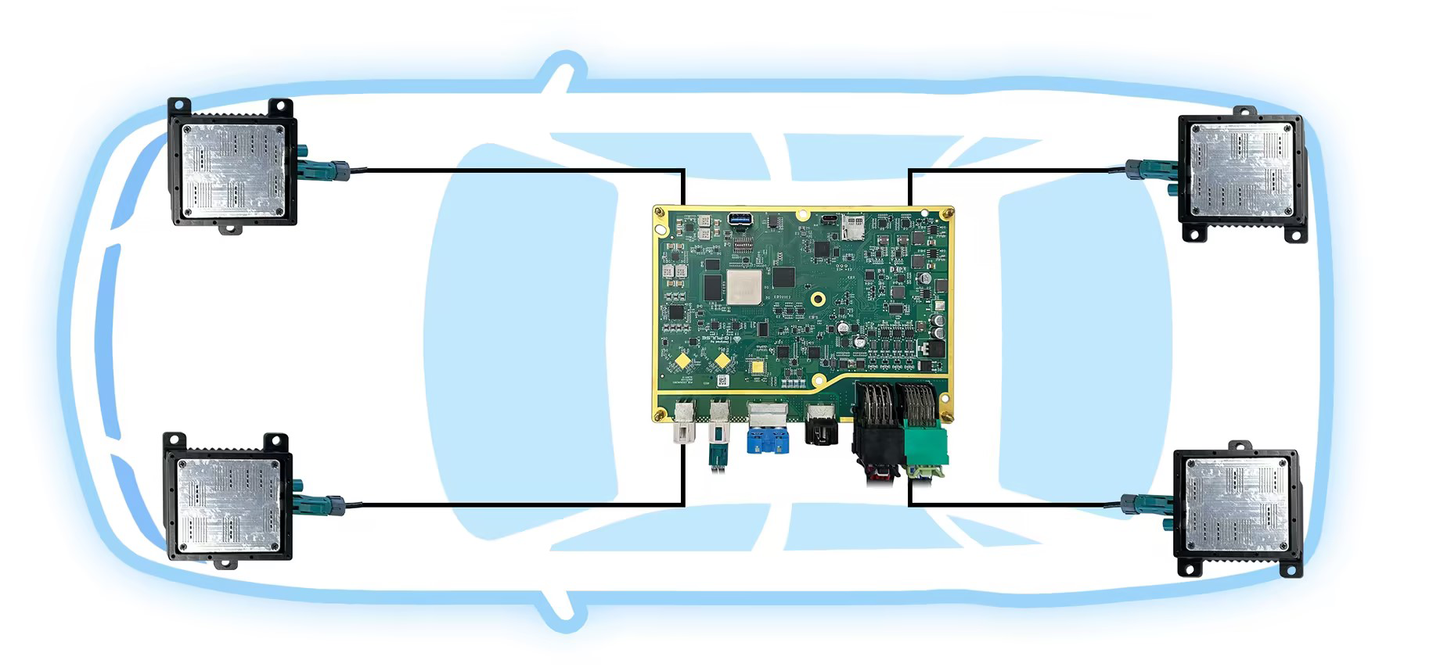
2、衛星雷達方案
NXP
Ref:Evaluating Distributed Radar Architectures? Here Are 4 Reasons You Should
TI
瑞薩
Infineon
Ref:Intron Technology Launches Cost-Effective Centralized 4D Corner Radar Solution that Supports Multiple Intelligent Driving Platforms Including Horizon Journey 6 Series_COMPANY NEWS_英恒
小結
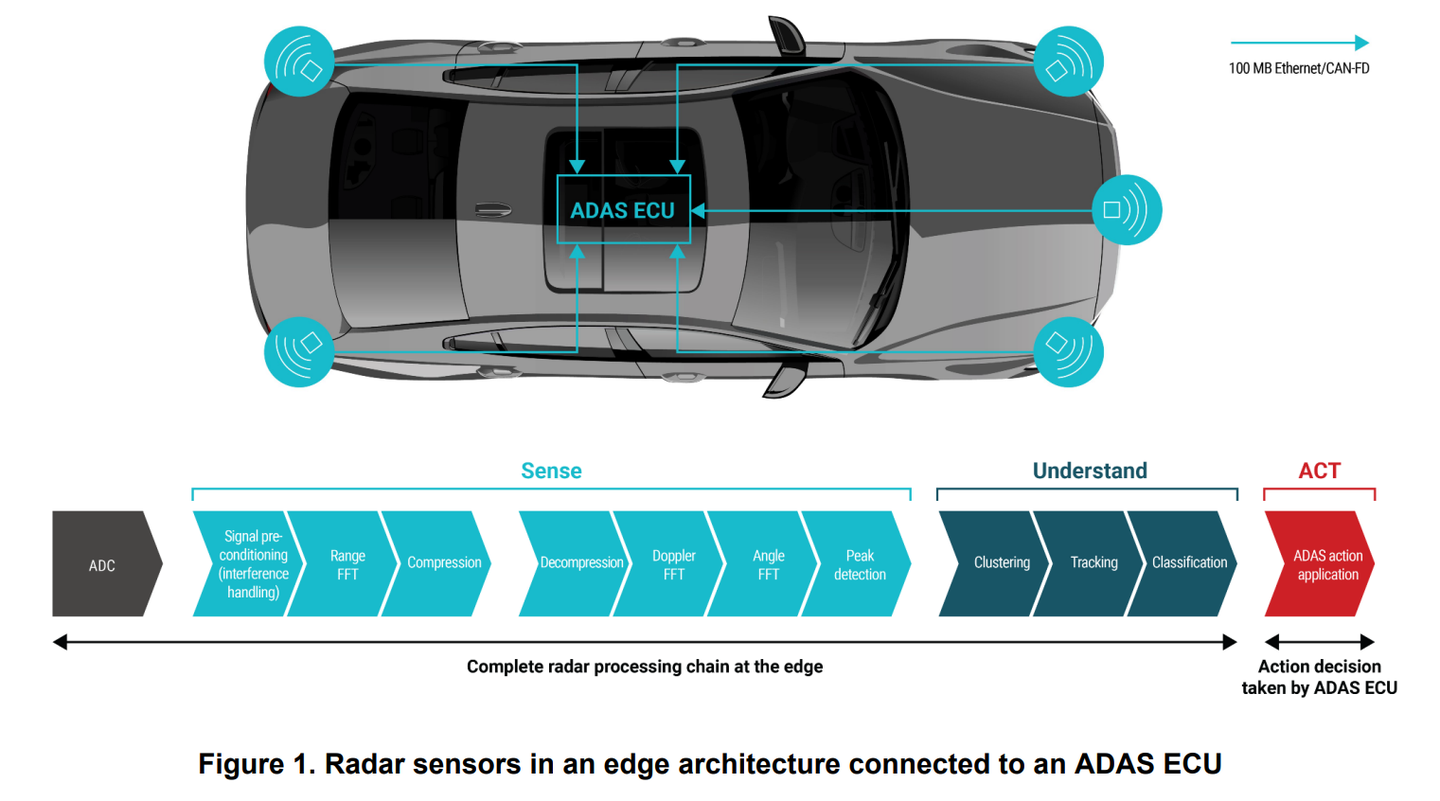
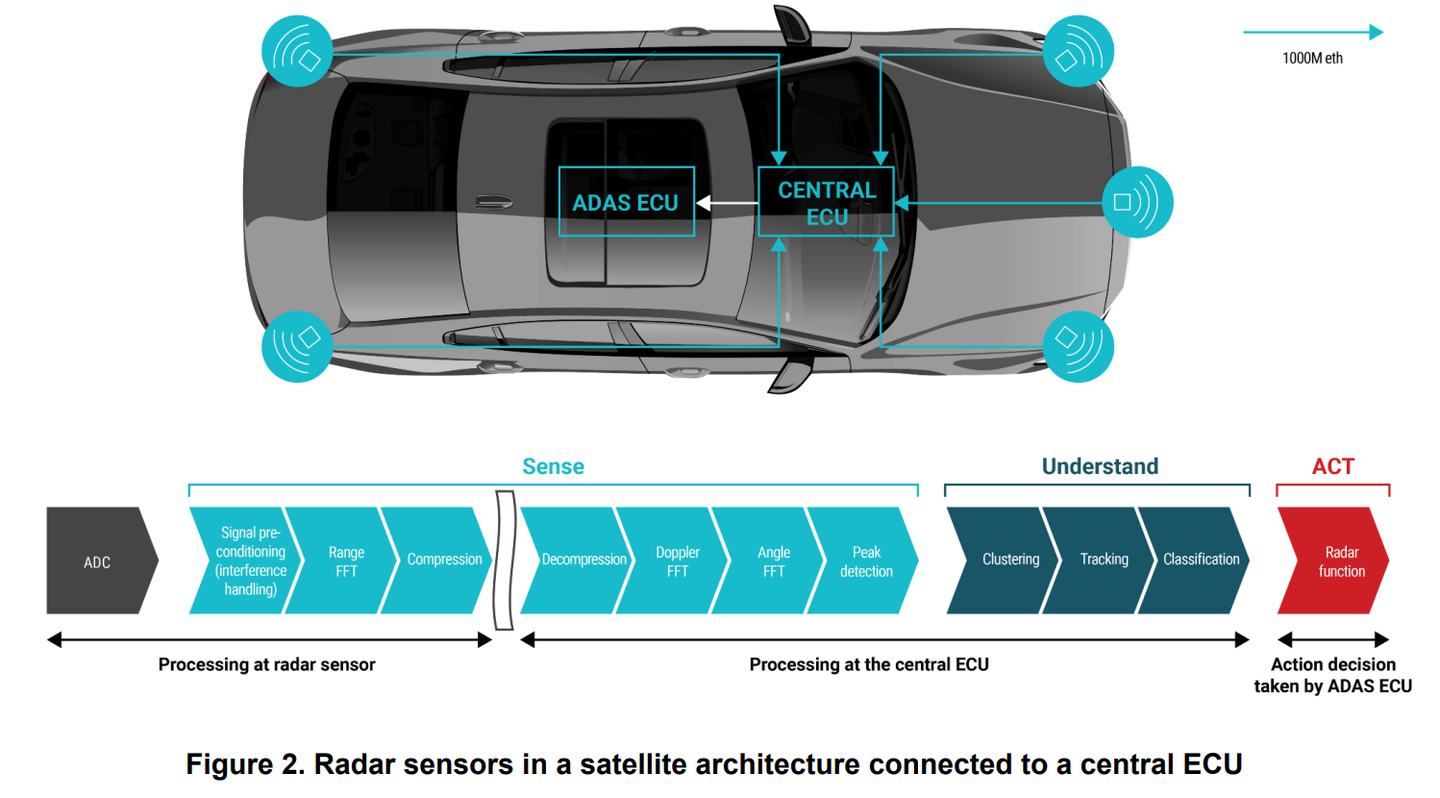
總整體上看,目前MMIC芯片供應商定義的分布式衛星雷達,都是進行了1DFFT并壓縮后通過千兆以太網傳輸到區域控制器進行幾個雷達的后端算法出來,然后在提交給中央域控(或者說ADAS域);
該方式在整車上不會這樣進行,整車會直接在中央域控中進行,至于是采樣Serdes傳輸RawData還是用以太網傳輸1DFFT壓縮數據,這個需要看中央域控配置Serdes還是以太網的成本以及,ADAS SoC的內部算力(是否含有富裕的DSP等)。
3、為什么需要分布式衛星雷達
集中處理能夠實現有效的傳感器融合算法,從而實現更精準的決策。這與人腦基于雙眼輸入而非單眼獨立決策的原理類似。原始設備制造商 (OEM) 可以部署用于提高角度分辨率(分布式孔徑雷達)和最大速度的算法,甚至用于物體分類的機器學習算法。傳感器輸入與這些算法的融合,可以提升感知性能,并生成相對精確的感知地圖。對于汽車制造商而言,這意味著更高的自動駕駛水平。對于駕駛員和乘客而言,則意味著更安全的汽車。
此外,使用衛星雷達傳感器可以實現系統的可擴展性和模塊化。將傳感器放置在車輛周圍更便捷的位置,可以實現許多 ADAS 應用。只需更改傳感器的數量或配置,即可調整覆蓋范圍,從而將單一平臺從成本敏感的低端車型擴展到提供不同自動駕駛級別的差異化高端車型。
衛星架構通過傳感器融合算法和中央ECU更強大的計算能力提升了價值。簡化的衛星傳感器和通過軟件實現的差異化有助于降低系統復雜性,并提供創造價值的新途徑。此外,使用衛星雷達使汽車制造商能夠選擇使用無線軟件更新來提升系統性能并增強安全性。這些多重優勢——性能、可擴展性和簡潔性——都使衛星架構在汽車行業中占據了顯著地位。
例如,該方案將射頻芯片的原始數據直接送入SoC,省去了預處理環節,利用SoC進行統一的時域數據處理。SoC內部的DSP等專用硬件加速單元,可以實現FFT、CFAR、DOA、超分辨率等處理算法,并輸出點云數據。進一步處理后,還可以生成目標類型、運動軌跡等信息,從而更好地應對各種智能駕駛場景,提升主動安全性。
小結:
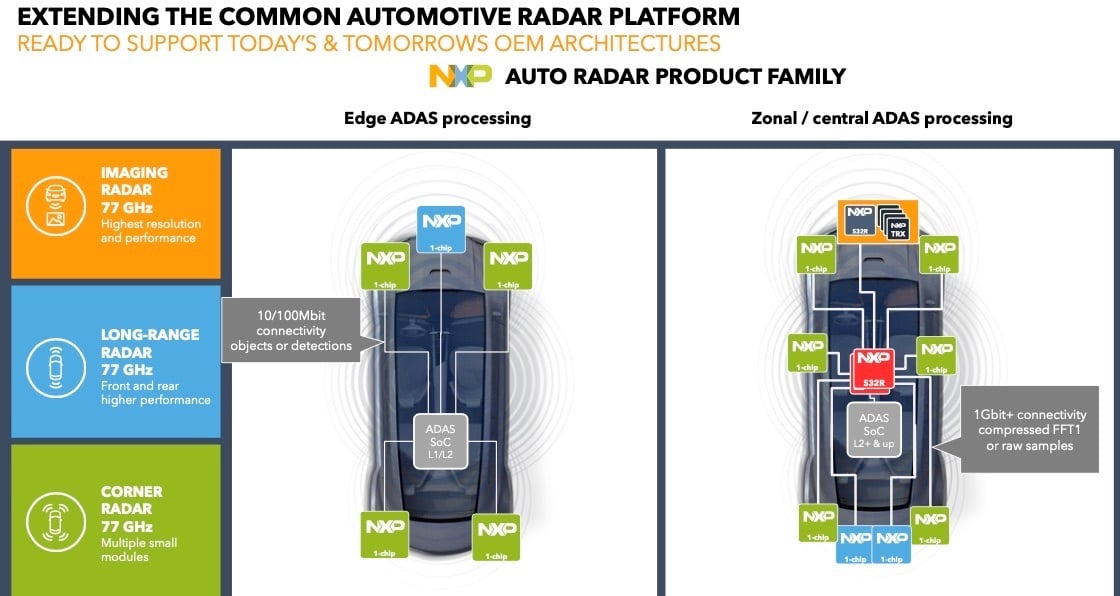
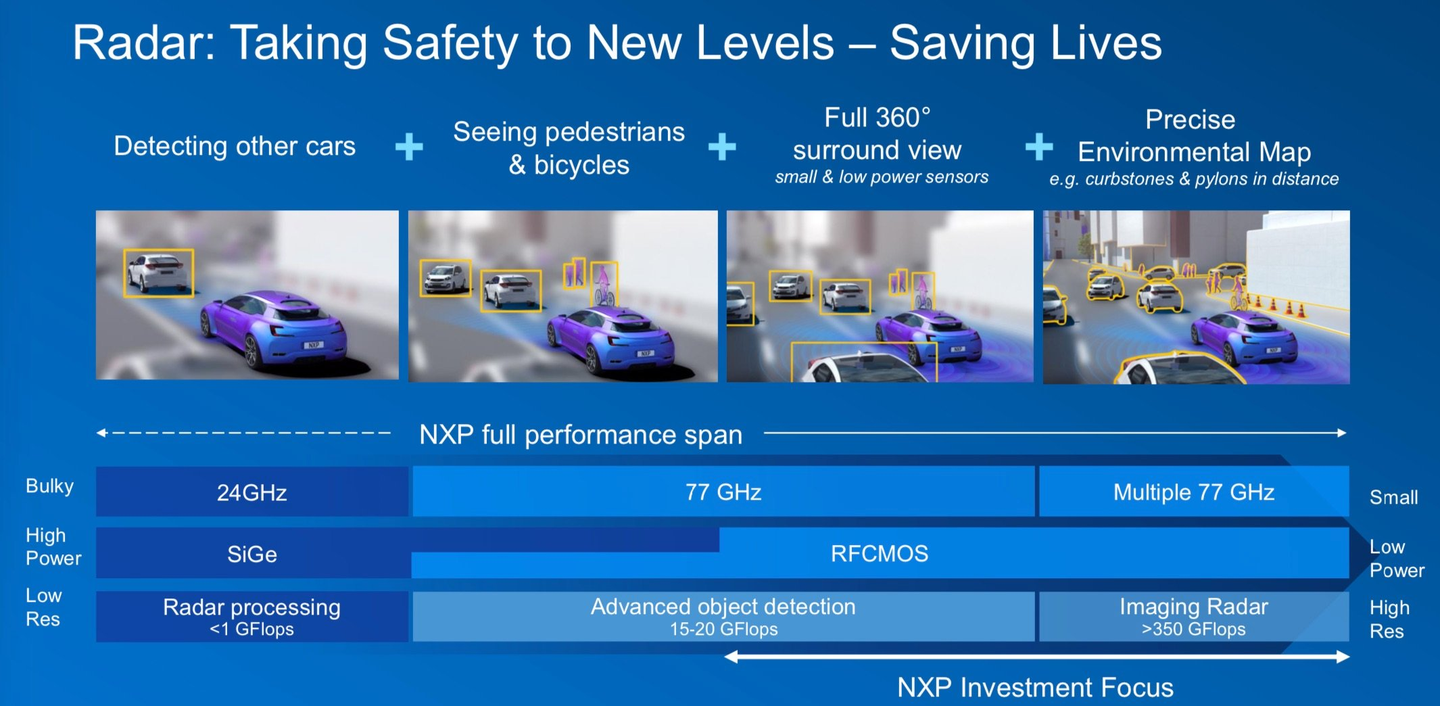
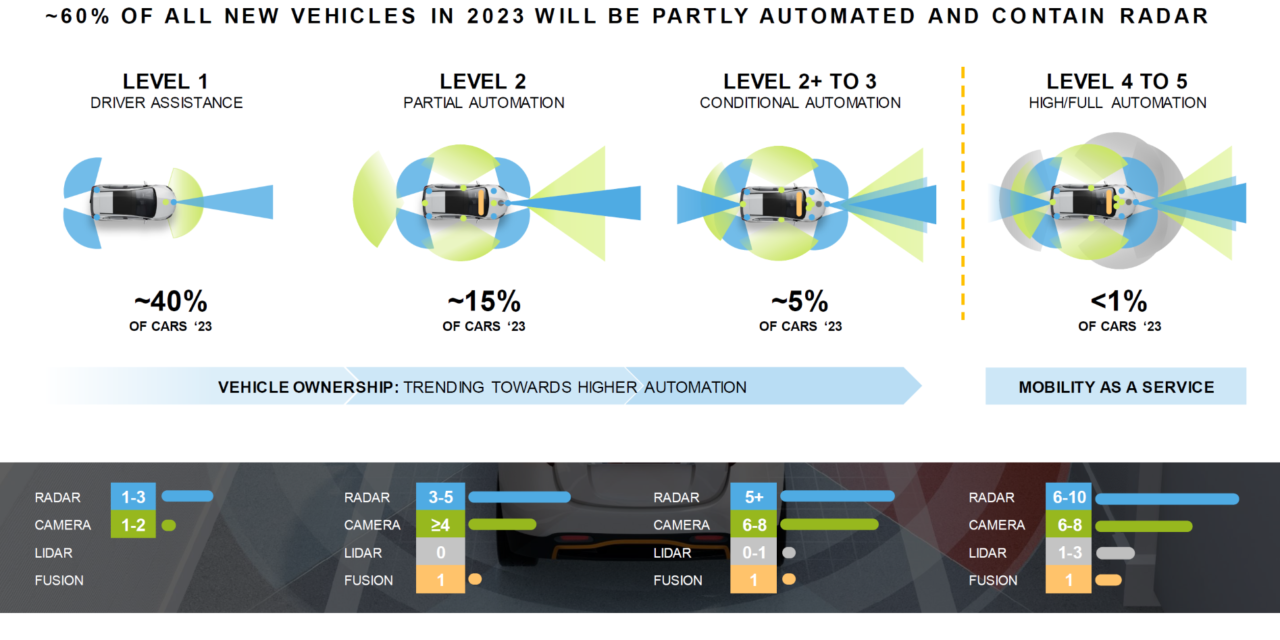
為什么要向分布式衛星或者稱為centralized radar processing反正,圖8和圖9的NXP slides提出了一個更為根本的原因:自動駕駛L3-L5發展的強需求。
-
360°雷達覆蓋和360°camera覆蓋,形成兩大傳感器的異形冗余;
-
雷達數量要增加,實現360°強覆蓋;
-
雷達成本要降低,以抵消雷達數量增強的影響;
-
雷達直接輸出目標參數給中央域控已經不夠,需要雷達輸出更原始的數據和點云數據給中央域控,由中央域控進行處理,形成算法上的覆蓋增強。
以上才是分布式衛星雷達為什么會成為后續主流自動駕駛傳感器配置的一個根本原因。








 React的狀態管理工具--Redux,案例--移動端外賣平臺)
(上))









