我們來詳細解析無感FOC(無傳感器磁場定向控制)中的高頻方波注入(High-Frequency Square-Wave Injection, HFSWI)?? 的原理。
這是一個用于零低速或極低速范圍內估算轉子位置的核心技術。
核心思想與要解決的問題
在電機靜止或轉速極低時:
?反電動勢(Back-EMF)為0或非常微弱。基于反電動勢觀測器的無感FOC方法會完全失效,因為無法從測量信號中提取有效的轉子位置信息。
電機需要啟動或穩定運行在低速下(例如,從0 RPM啟動,或幾Hz的頻率下運行)。
?高頻方波注入法的核心思想是:?? 主動向電機注入一個高頻的激勵信號(方波),然后通過檢測電機對這個特定激勵的響應,來解調出轉子的位置信息。它不依賴于反電動勢,而是依賴于電機的凸極性(Saliency)?。
基本原理(分步解析)
第1步:前提 - 電機的凸極性
大多數永磁同步電機(PMSM)和IPMSM(內置式永磁同步電機)都存在凸極性。這意味著轉子的物理結構(如磁鋼嵌入鐵芯導致的磁路不對稱)使得電機在直軸(d-axis)?? 和 ?交軸(q-axis)?? 上的電感不同(Ld ≠ Lq)。
這種電感差異是高頻注入法能夠工作的物理基礎。轉子位置的變化會導致這種電感差異在靜止坐標系下表現為阻抗的變化。
第2步:注入高頻電壓方波
在估計的同步旋轉坐標系(d-q軸)或靜止坐標系(α-β軸)上,疊加一個高頻電壓方波信號。
最常見的是在估計的d軸上注入:
V_dh = V_inj * sign(sin(ω_h * t))
其中:
V_inj是注入電壓的幅值(通常很小,例如幾伏)。ω_h是注入的角頻率(通常為幾百Hz到幾kHz)。q軸的注入電壓V_qh = 0。
這個高頻電壓信號會產生一個高頻電流響應。由于頻率很高,這個高頻電流成分遠高于電機正常運行的基礎波電流,因此可以被濾波器分離出來。
第3步:提取高頻響應電流
通過帶通濾波器(BPF)或簡單的低通/高通濾波器,從測量的相電流中分離出高頻響應電流分量 i_dh和 i_qh。
第4步:解調與位置誤差提取(關鍵步驟)
這是整個原理中最精妙的部分。高頻電流響應的幅值包含了轉子位置信息。
?建立關系?:理論分析和數學推導可以證明,在高頻激勵下,電機主要表現為一個感性負載。高頻電流響應的幅值與電感成反比。由于
Ld ≠ Lq,電流響應的大小會隨著轉子角度變化。?誤差信號生成?:通過特定的解調算法(例如,對高頻電流信號進行包絡檢波或與注入信號同步解調),可以提取出一個包含轉子位置誤差的信號。
一個非常經典的方法是使用 ?鎖相環(PLL)?? 結構。解調出的誤差信號 ε可以表示為:
ε ∝ sin(2 * (θ_est - θ_real))
其中:
θ_est是觀測器估算的轉子角度。θ_real是真實的轉子角度。
第5步:閉環校正
將這個誤差信號 ε輸入到一個PI調節器?(作為PLL的環路濾波器)。PI調節器的輸出自動校正估算的轉子電角速度 ω_est。對 ω_est進行積分,就得到了更新的轉子位置估計值 θ_est。
當估算位置 θ_est收斂到真實位置 θ_real時,誤差信號 ε趨于零,系統進入鎖定狀態。
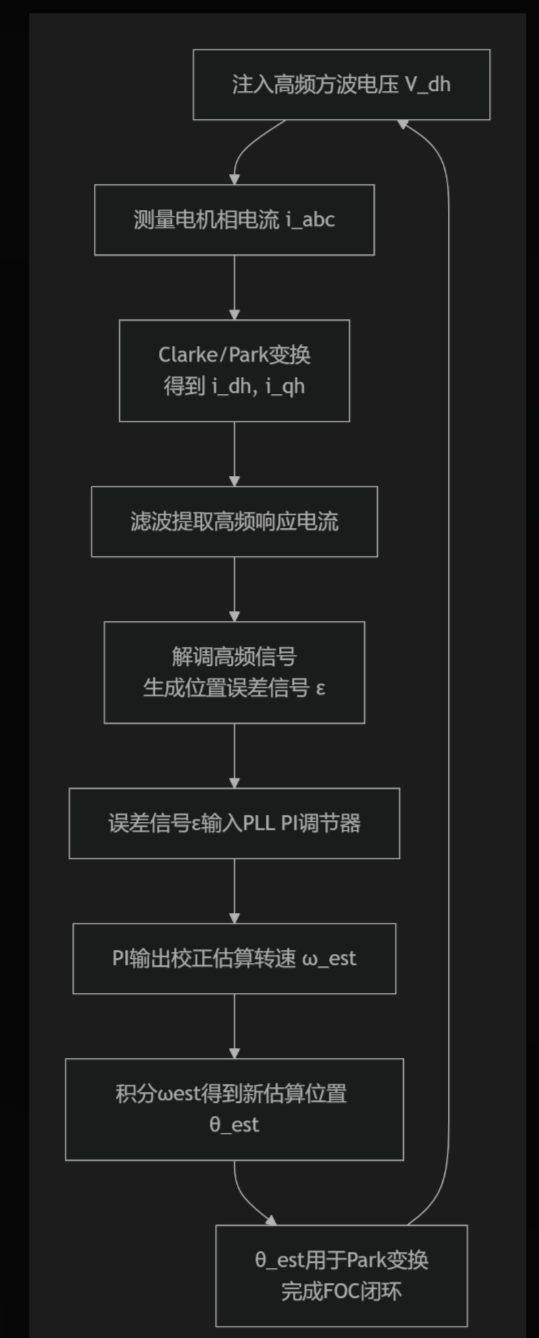
流程總結
整個過程的控制閉環可以簡化為以下流程圖:
優缺點
?優點:??
?可在零速和極低速下穩定運行,這是其最大價值。
不依賴于電機反電動勢,啟動扭矩大,啟動特性好。
對電機參數(如電阻)變化不敏感。
?缺點:??
?會帶來可聞的高頻噪聲?(因為注入的是幾百Hz的方波,正好在人耳敏感范圍內)。這是該技術最主要的缺點。
會產生額外的鐵損和銅損,降低系統效率,可能引起電機發熱。
算法相對復雜,需要額外的信號處理和解調。
依賴于電機的凸極性。對于表面貼式永磁同步電機(SPMSM)這種凸極性不明顯的電機,效果會很差甚至無法工作。
應用場景
主要用于對低速性能要求極高,且對噪聲和效率不是極度敏感的場景:
伺服系統的初始定位和低速控制。
電動汽車的零速啟動和爬行。
家電(如空調壓縮機)的啟動。
無人機螺旋槳的啟動(防止卡死)。
希望這個分步解析能幫助你徹底理解高頻方波注入的原理!



















