第1章 引言
無人駕駛技術作為21世紀交通運輸領域最具革命性的技術創新之一,正在深刻地改變著人類的出行方式和生活模式。進入2025年,隨著人工智能、5G通信、高精度傳感器等關鍵技術的快速發展與成熟,無人駕駛技術已從實驗室的概念驗證階段逐步邁向大規模商業化應用的關鍵轉折點。根據中國報告大廳最新發布的數據顯示,2024年中國無人駕駛汽車市場規模達到575.3億元,整體呈現逐年上升的趨勢,反映出全球無人駕駛汽車行業市場規模在未來幾年內將持續擴大。這一增長態勢不僅體現了技術進步帶來的產業機遇,更反映了社會對智能化交通解決方案日益增長的迫切需求。
當前無人駕駛技術的發展正處于一個重要的歷史節點,各種技術路線和解決方案在激烈競爭中不斷演進和完善。多家研究機構預測,2025年中國汽車自動駕駛普及將會提速,搭載NOA(自動導航輔助駕駛)方案的乘用車銷量將達到500萬輛。與此同時,傳統的模塊化架構正面臨著端到端深度學習方案的挑戰,激光雷達與純視覺方案之間的技術路線之爭日趨激烈,而車路協同與單車智能的融合發展也為整個行業帶來了新的發展機遇。在這樣的背景下,對當前無人駕駛技術現狀進行全面、系統的梳理和分析,不僅有助于理解技術發展的內在規律和趨勢,更能為未來的技術創新和產業發展提供重要的參考依據。
本文將從感知系統、決策規劃算法、控制執行系統、通信與網絡技術、兩輪車智能技術、測試與驗證技術、產業應用現狀以及未來發展趨勢等多個維度,對2025年8月無人駕駛技術的現有技術進行深入的研究和綜述,旨在為相關領域的研究人員、工程技術人員以及產業決策者提供有價值的技術參考和發展指引。
第2章 感知系統技術現狀
感知系統作為無人駕駛汽車的"眼睛"和"耳朵",其技術水平直接決定了自動駕駛系統的安全性和可靠性。在自動駕駛技術中,感知模塊負責獲取自動駕駛車輛周圍環境信息,是自動駕駛車輛的"眼睛",下游模塊通過感知得到的環境信息來進行下一步決策。當前的感知系統主要依賴于多種傳感器的融合,包括激光雷達(LiDAR)、毫米波雷達、攝像頭、超聲波傳感器等,每種傳感器都有其獨特的優勢和局限性,如何有效地融合這些傳感器數據,實現互補優勢,成為感知系統技術發展的核心挑戰。
激光雷達技術在無人駕駛感知系統中占據著舉足輕重的地位。車載激光雷達(LiDAR)因其具有可準確獲取目標的三維信息、分辨率高、抗干擾能力強、探測范圍廣、近全天候工作等優點,在智能駕駛環境感知系統中占據了重要地位。激光雷達的工作原理基于光的飛行時間測量(Time of Flight, ToF),通過發射激光脈沖并測量其往返時間來計算目標物體的距離。其距離測量公式可以表示為:
$$d = \frac{c \cdot t}{2}$$
其中,d表示目標距離,c為光速,t為激光脈沖的往返時間。激光雷達能夠生成高精度的三維點云數據,為環境建模和障礙物檢測提供了可靠的基礎數據。然而,激光雷達技術也面臨著成本高、體積大、在惡劣天氣條件下性能下降等挑戰。近年來,固態激光雷達技術的發展為解決這些問題提供了新的思路,通過采用微機電系統(MEMS)技術和光相控陣技術,大幅降低了激光雷達的成本和體積。
與激光雷達相比,基于攝像頭的視覺感知系統具有成本低、信息豐富、技術成熟等優勢。隨著大模型等AI技術的不斷發展,數據驅動的端到端方案逐漸成為行業新寵,激光雷達這一曾被視為高階智能駕駛系統必備組件的技術正面臨挑戰。現代計算機視覺技術,特別是基于深度學習的目標檢測和語義分割算法,使得攝像頭能夠實現對道路環境的精確理解和分析。多攝像頭系統通過不同視角的圖像融合,可以實現360度全方位的環境感知,同時利用立體視覺技術可以獲得一定精度的深度信息。深度估計的數學模型可以通過視差原理表示:
$$Z = \frac{f \cdot B}{d}$$
其中,Z為目標深度,f為攝像頭焦距,B為雙攝像頭基線距離,d為視差。
毫米波雷達作為感知系統的重要組成部分,具有全天候工作、穿透能力強、成本相對較低等優點。目前,超聲波雷達、毫米波雷達和多攝像頭系統已經在高端汽車上應用,隨著智能駕駛發展勢如破竹,環境感知技術將快速發展,進一步發揮協同作用。毫米波雷達工作在24GHz、77GHz等頻段,通過多普勒效應可以直接測量目標的速度信息,這是其相對于其他傳感器的獨特優勢。毫米波雷達的測速公式為:
$$v = \frac{\lambda \cdot f_d}{2}$$
其中,v為目標速度,為雷達波長,
為多普勒頻移。
傳感器融合技術是提高感知系統性能的關鍵技術。通過多傳感器數據融合,可以充分發揮各種傳感器的優勢,克服單一傳感器的局限性,提高系統的魯棒性和可靠性。當前主流的融合方法包括數據級融合、特征級融合和決策級融合。數據級融合直接對原始傳感器數據進行融合,能夠保留最多的信息但計算復雜度較高;特征級融合對提取的特征進行融合,在保證信息完整性的同時降低了計算復雜度;決策級融合對各傳感器的決策結果進行融合,計算復雜度最低但可能丟失一些重要信息。
| 傳感器類型 | 主要優勢 | 主要局限 | 典型應用場景 | 成本水平 |
|---|---|---|---|---|
| 激光雷達 | 高精度3D信息,全天候,遠距離 | 成本高,體積大,雨雪影響 | 高級別自動駕駛 | 高 |
| 攝像頭 | 成本低,信息豐富,色彩紋理 | 光照敏感,惡劣天氣影響大 | 輔助駕駛,交通標識識別 | 低 |
| 毫米波雷達 | 全天候,速度測量,穿透性強 | 分辨率低,近距離盲區 | 自適應巡航,防撞預警 | 中 |
| 超聲波雷達 | 成本低,近距離精確 | 距離短,速度慢 | 泊車輔助,低速障礙檢測 | 低 |
第3章 決策規劃算法發展現狀
決策規劃系統是無人駕駛汽車的"大腦",負責根據感知系統提供的環境信息,制定安全、高效、舒適的行駛策略。自動駕駛汽車的決策規劃是至關重要的,它包括多傳感器信息的融合、根據駕駛需求進行任務決策、避開障礙物的約束條件、選擇多條安全路徑和最優路徑等步驟。最終,自動駕駛汽車會選擇一條最優路徑作為車輛的行駛軌跡。當前的決策規劃算法主要可以分為基于規則的方法、基于搜索的方法、基于優化的方法以及基于深度學習的方法等幾大類,每種方法都有其適用的場景和技術特點。
基于規則的決策方法是早期自動駕駛系統中廣泛采用的技術路線,通過預先定義的規則和邏輯來處理各種駕駛場景。這種方法的優勢在于邏輯清晰、可解釋性強、在特定場景下表現穩定,但面對復雜多變的真實道路環境時,往往難以覆蓋所有可能的情況。隨著道路場景復雜度的增加,基于規則的方法需要定義的規則數量呈指數級增長,系統的維護和升級變得極為困難。因此,現代無人駕駛系統更多地采用基于規則與其他方法相結合的混合架構。
基于搜索的路徑規劃算法在無人駕駛系統中占據重要地位。模塊化和端到端自動駕駛系統原理顯示了當前主流的技術架構。經典的搜索算法包括A算法、RRT(Rapidly-exploring Random Tree)算法、D算法等。A*算法通過啟發式函數指導搜索方向,能夠快速找到從起點到終點的最優路徑,其代價函數可以表示為:
$$f(n) = g(n) + h(n)$$
其中,表示從起點到當前節點的實際代價,
為啟發式函數估計的從當前節點到終點的代價。RRT算法通過隨機采樣的方式逐步擴展搜索樹,特別適用于高維空間中的路徑規劃問題。這些算法在靜態環境中表現優異,但在動態環境中需要與實時重規劃技術相結合。
基于優化的規劃方法通過建立數學優化模型來求解最優的行駛軌跡。典型的優化方法包括二次規劃(QP)、非線性規劃(NLP)、模型預測控制(MPC)等。模型預測控制是當前最為成功的優化方法之一,它通過預測未來一段時間內的系統狀態,優化控制序列以實現既定目標。MPC的優化問題可以表述為:

subject to:
其中,和
分別表示第k時刻的狀態和控制輸入,Q、R、P為權重矩陣,
和
分別為狀態和控制約束集合。
近年來,基于深度學習的決策規劃方法展現出巨大的潛力。深度學習在自動駕駛中的關鍵技術之一是目標檢測。這涉及使用神經網絡來識別和分類車輛環境中的對象,例如行人、其他車輛和交通標志。物體檢測對于自動駕駛汽車做出有關如何安全行駛道路和避免碰撞的明智決策至關重要。近年來興起的深度卷積神經網絡與深度強化學習,能通過大量學習實現更智能的決策。端到端的學習方法直接從傳感器數據學習到控制指令的映射,避免了復雜的中間表示和手工特征設計。強化學習方法通過與環境的交互學習最優策略,特別適合處理復雜的多智能體交互場景。
基于強化學習的自動駕駛汽車路徑規劃方法研究綜述和自動駕駛中基于深度學習的預測和規劃融合方法綜述顯示了學界對這一領域的關注度。深度強化學習結合了深度學習的特征學習能力和強化學習的決策優化能力,在復雜的駕駛場景中展現出優異的性能。然而,基于深度學習的方法也面臨著可解釋性差、訓練數據需求量大、泛化能力有限等挑戰。
當前決策規劃系統的一個重要發展趨勢是預測與規劃的融合。傳統的模塊化架構將預測和規劃分別處理,這種方式在信息傳遞過程中可能產生誤差累積。而融合的預測-規劃框架能夠實現更緊密的耦合,提高系統的整體性能。這種融合方法通常采用聯合優化的策略,同時考慮其他交通參與者的未來行為預測和自車的規劃決策,從而實現更安全、更智能的駕駛行為。
第4章 控制執行系統技術分析
控制執行系統是無人駕駛汽車將高層決策規劃轉化為具體車輛動作的關鍵環節,直接影響著車輛的行駛安全性、舒適性和燃油經濟性。現代無人駕駛車輛的控制系統通常采用分層控制架構,包括運動規劃層、軌跡跟蹤層和底層執行器控制層。運動規劃層負責生成期望的運動軌跡,軌跡跟蹤層確保車輛準確跟蹤規劃軌跡,而底層執行器控制層則直接控制轉向、加速和制動等執行機構。這種分層設計既保證了系統的模塊化和可維護性,又實現了不同時間尺度上的精確控制。
軌跡跟蹤控制是控制系統的核心技術之一,其目標是使車輛的實際運動軌跡盡可能準確地跟蹤規劃系統生成的參考軌跡。經典的軌跡跟蹤方法包括純跟蹤算法(Pure Pursuit)、前視距離控制算法和Stanley算法等。純跟蹤算法通過在車輛前方選取一個目標點,計算使車輛到達該目標點所需的轉向角,其數學模型可以表示為:
$$\delta = \arctan\left(\frac{2L\sin\alpha}{l_d}\right)$$
其中,為前輪轉向角,L為車輛軸距,
為車輛航向與目標點連線的夾角,
為前視距離。Stanley算法則通過最小化車輛到參考路徑的橫向誤差和航向誤差來計算控制輸入,具有更好的穩定性和跟蹤精度。
模型預測控制(MPC)在車輛控制中的應用越來越廣泛,特別是在需要考慮多個約束條件的復雜控制場景中。MPC通過建立車輛動力學模型,預測未來一段時間內的車輛狀態,并在滿足各種約束條件的前提下,優化控制序列以實現既定的控制目標。車輛的簡化動力學模型可以表示為:
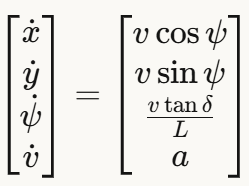
其中,(x,y)為車輛位置,為航向角,v為速度,
為前輪轉向角,a為加速度,L為軸距。
自適應控制技術在應對模型不確定性和外界干擾方面發揮重要作用。由于車輛參數的變化、路面條件的改變以及外界風力等因素的影響,固定參數的控制器往往難以在所有工況下都保持良好的性能。自適應控制通過在線估計和調整控制參數,能夠有效提高控制系統的魯棒性。滑模控制因其對參數變化和外界干擾的強魯棒性,也在車輛控制中得到了廣泛應用。
線控技術(Drive-by-Wire)是實現精確控制的硬件基礎。傳統的機械或液壓控制系統被電子控制系統所取代,包括線控轉向(Steer-by-Wire)、線控制動(Brake-by-Wire)、線控油門(Throttle-by-Wire)等。線控系統不僅提供了更高的控制精度和響應速度,還為冗余設計和故障診斷提供了可能。現代線控系統通常采用多重冗余設計,確保在單點故障情況下系統仍能安全運行。
控制系統的安全性設計是無人駕駛技術的重中之重。ISO 26262功能安全標準為車輛控制系統的設計和驗證提供了詳細的指導原則。故障樹分析(FTA)、故障模式與影響分析(FMEA)、危險分析與風險評估(HARA)等方法被廣泛用于識別和評估潛在的安全風險。控制系統必須具備快速故障檢測和安全降級的能力,在檢測到故障時能夠及時將車輛切換到安全狀態。
| 控制方法 | 主要優勢 | 適用場景 | 計算復雜度 | 參數調節難度 |
|---|---|---|---|---|
| 純跟蹤算法 | 簡單直觀,計算量小 | 低速、簡單軌跡 | 低 | 容易 |
| Stanley算法 | 穩定性好,跟蹤精度高 | 中高速直行和緩轉 | 低 | 中等 |
| 模型預測控制 | 處理約束能力強,預測性好 | 復雜場景,多目標優化 | 高 | 困難 |
| 自適應控制 | 魯棒性強,適應性好 | 參數變化大的環境 | 中等 | 困難 |
| 滑模控制 | 抗干擾能力強 | 惡劣工況,不確定環境 | 中等 | 中等 |
第5章 通信與網絡技術
車聯網通信技術作為實現車路協同和智能交通系統的關鍵基礎設施,正在成為推動無人駕駛技術發展的重要驅動力。V2X(Vehicle-to-Everything)是一種車與車、車與人、車與交通設施之間的信息交換技術,通過傳感器、攝像頭和無線連接,使車輛能夠與駕駛員、其他車輛、行人和交通信號燈等道路基礎設施共享位置、速度、加速度等實時信息。旨在通過實時通信來提高交通效率和安全性。V2X技術的發展為無人駕駛汽車提供了超越單車感知能力的協同感知和決策能力,顯著擴展了自動駕駛系統的感知范圍和預測能力。
C-V2X(Cellular Vehicle-to-Everything)技術作為基于蜂窩網絡的車聯網通信標準,正逐步成為行業主流選擇。蜂窩車聯網(C-V2X)技術發展、應用及展望顯示了該技術的重要地位。C-V2X基于3GPP制定的通信標準,支持車輛與其他車輛(V2V)、車輛與基礎設施(V2I)、車輛與行人(V2P)、車輛與網絡(V2N)等多種通信模式。相比基于802.11p的DSRC技術,C-V2X具有更好的通信可靠性、更大的通信范圍和更高的頻譜效率。美格智能以SoC芯片開發、軟硬件一體化研發的技術實力,融合5G、AI等前沿科技,推出了5G R16車規級C-V2X模組MA922和MA925系列,能夠在T-BOX、TCU、OBU車載單元以及RSU等路側設備上實現車聯網系統的部署和落地,體現了產業界對C-V2X技術的重視和投入。
5G網絡技術為V2X通信提供了強大的網絡基礎設施支撐。汽車網絡對服務質量(QoS)的要求體現在延遲、數據傳輸速率、可靠性和通信距離等方面。近年來,諸如車聯網(V2X)等新興汽車網絡應用和用例已經取得了一些成就,它們無疑對上述QoS提出了更加嚴格的要求。5G網絡的超低時延(uRLLC)、增強移動寬帶(eMBB)、大規模機器通信(mMTC)三大應用場景完美契合了V2X通信的需求。5G網絡能夠提供毫秒級的端到端時延,支持高可靠性的實時通信,這對于自動駕駛的安全關鍵應用至關重要。網絡切片技術使得不同優先級的V2X業務能夠獲得差異化的服務質量保證。
邊緣計算(MEC)技術的引入進一步增強了車聯網系統的實時處理能力。通過將計算能力下沉到網絡邊緣,邊緣計算能夠顯著降低通信時延,提高數據處理效率。在車聯網場景中,邊緣計算節點可以部署在基站、路側單元(RSU)或區域數據中心,為車輛提供實時的交通信息處理、協同感知、協同決策等服務。這種分布式計算架構不僅減輕了中心化云計算的負擔,還提高了系統的可擴展性和容錯能力。
車聯網通信協議棧的設計需要考慮到多層次的技術要求。物理層需要選擇合適的調制解調技術和多址接入方式,以保證在高速移動和密集部署環境下的通信質量;數據鏈路層需要設計高效的介質訪問控制(MAC)協議,以處理車輛高速移動導致的快速拓撲變化;網絡層需要支持多跳路由和移動性管理;傳輸層需要提供可靠的數據傳輸保證;應用層則需要定義標準化的消息格式和交互協議。
工業和信息化部、公安部、自然資源部、住房和城鄉建設部、交通運輸部關于開展智能網聯汽車"車路云一體化"應用試點工作的通知體現了政府對車路協同技術發展的重視和支持。車路云一體化架構將車輛智能、路側智能和云端智能有機結合,形成了協同感知、協同決策、協同控制的智能交通系統。在這個架構中,路側設備通過各種傳感器收集道路交通信息,云端平臺負責大數據分析和全局優化,車輛則作為移動的感知和執行單元,三者通過高速可靠的通信網絡實現信息共享和協同工作。
通信安全和隱私保護是車聯網技術面臨的重大挑戰。車聯網系統涉及大量的個人隱私信息和安全關鍵數據,必須建立完善的安全防護機制。密碼學技術、身份認證、訪問控制、入侵檢測等安全技術在車聯網中得到了廣泛應用。區塊鏈技術因其去中心化、不可篡改的特性,在車聯網數據共享和信任建立方面展現出巨大潛力。
第6章 兩輪車智能技術發展現狀
兩輪車智能技術作為無人駕駛技術的重要分支,正在經歷前所未有的發展機遇。兩輪電動車的未來:智能化、高續航、自動駕駛和兩輪電動車上演"智能"大戰顯示了行業對這一領域的關注度不斷提升。與四輪汽車相比,兩輪車在實現自動駕駛方面面臨著獨特的技術挑戰,包括車輛穩定性控制、有限的傳感器安裝空間、電池續航限制以及復雜的交通環境適應等問題。然而,兩輪車也具有體積小、成本低、靈活性高等獨特優勢,為智能化技術的應用提供了新的可能性。
兩輪車自平衡技術是實現自動駕駛的基礎技術之一。雅迪相關技術人員介紹,目前雅迪已掌握電動兩輪車無人駕駛的核心技術,在研發團隊的合力下,無人駕駛研發即將進入2.0版本。傳統兩輪車依靠騎行者的平衡能力維持穩定,而智能兩輪車必須通過技術手段實現自主平衡。常用的自平衡技術包括陀螺儀穩定系統、反作用輪技術、動態平衡算法等。九號電動T自平衡探索版能夠主動識別障礙物,自動規劃行進路線;主動制動,規避障礙物,體現了自平衡技術在實際產品中的應用。
自平衡控制系統的數學模型通常基于倒立擺原理。兩輪車的動力學方程可以簡化表示為:
$$J\ddot{\theta} = mgl\sin\theta + \tau$$
其中,J為轉動慣量,為傾斜角,m為質量,g為重力加速度,l為重心高度,
為控制力矩。通過PID控制器或更先進的控制算法,系統能夠實時調整電機輸出,維持車輛穩定。
兩輪車的環境感知系統需要在有限的空間和功耗約束下實現有效的環境建模。兩輪電動車在自動駕駛方面面臨技術難度,由于平臺小,可安裝設備和攜帶能量有限,傳感器和運算系統的耗電量可能受限,這限制了自動駕駛技術的應用。因此,兩輪車智能系統更多采用輕量化的傳感器配置,如小型攝像頭、毫米波雷達、慣性測量單元(IMU)等。通過優化的算法設計,在保證感知精度的同時降低計算復雜度和功耗。
路徑規劃算法在兩輪車應用中需要考慮車輛的運動約束和穩定性要求。兩輪車的轉彎半徑相對較小,具有更好的機動性,但同時也面臨側向穩定性的挑戰。路徑規劃算法需要在保證安全的前提下,充分利用兩輪車的機動優勢。考慮到兩輪車經常行駛在混合交通環境中,路徑規劃還需要處理與行人、自行車、汽車等多種交通參與者的交互問題。
智能兩輪車的人機交互系統設計也具有獨特性。中國電動兩輪車市場在國家政策、需求、物聯網技術等因素共同助力下,正逐步進入智能化時代,電動兩輪車消費者年輕化趨勢較為明顯,用戶需求提升,對產品的智能化要求也隨之提高。與汽車的全封閉環境不同,兩輪車騎行者直接暴露在外界環境中,這要求人機交互系統既要考慮安全性,又要保證在各種天氣條件下的可用性。語音識別、手勢控制、智能頭盔等技術為兩輪車提供了新的交互方式。
兩輪車智能網聯技術的發展也值得關注。通過5G、V2X等通信技術,智能兩輪車可以與交通基礎設施、其他車輛以及云端服務進行實時通信,獲取實時交通信息、天氣信息、路況信息等,為騎行者提供更安全、更高效的出行服務。智能導航、防盜定位、遠程診斷、OTA升級等功能的實現,都離不開網聯技術的支撐。
共享兩輪車的智能化運營也是一個重要的應用方向。通過GPS定位、物聯網技術、大數據分析等手段,實現車輛的智能調度、故障預測、用戶行為分析等功能。人工智能算法被用于優化車輛投放、預測需求熱點、提高運營效率。這些技術不僅提高了共享兩輪車的服務質量,也為城市交通管理提供了有價值的數據支撐。
| 技術領域 | 主要挑戰 | 解決方案 | 技術成熟度 | 應用前景 |
|---|---|---|---|---|
| 自平衡控制 | 動態穩定性,抗干擾能力 | 多傳感器融合,先進控制算法 | 較高 | 廣闊 |
| 環境感知 | 功耗限制,空間約束 | 輕量化傳感器,優化算法 | 中等 | 良好 |
| 路徑規劃 | 混合交通環境,動態避障 | 多層次規劃,行為預測 | 中等 | 良好 |
| 人機交互 | 開放環境,安全性 | 多模態交互,智能設備 | 較高 | 廣闊 |
| 網聯技術 | 通信穩定性,數據安全 | 5G/V2X,加密保護 | 中等 | 良好 |
第7章 測試與驗證技術體系
無人駕駛技術的安全性和可靠性直接關系到公眾的生命財產安全,因此建立完善的測試與驗證體系是無人駕駛技術走向實用化的關鍵環節。自動駕駛汽車(AVs)逐步進入實際道路測試和示范階段,AVs與人類頻繁互動,其駕駛性能要求已從功能層面的"安全穩定駕駛"轉向互動層面的"像人一樣駕駛"。當前的測試驗證體系主要包括仿真測試、封閉場地測試、開放道路測試以及虛實結合的測試方法,每種測試方法都有其特定的作用和價值,需要綜合運用才能全面驗證自動駕駛系統的性能。
仿真測試作為無人駕駛技術驗證的重要手段,具有成本低、效率高、可重復性強、安全性好等優勢。現代仿真平臺能夠構建高度逼真的虛擬環境,包括精確的車輛動力學模型、真實的傳感器模型、復雜的交通場景以及多變的天氣條件。主流的仿真平臺如CARLA、AirSim、SUMO、PreScan等,為自動駕駛算法的開發和測試提供了強大的支撐。仿真測試可以覆蓋大量的邊界場景和異常情況,這些場景在現實中難以復現或過于危險。通過Monte Carlo方法和統計學原理,仿真測試能夠評估自動駕駛系統在各種概率分布下的性能表現。
仿真測試的有效性很大程度上取決于仿真模型的保真度。車輛動力學仿真需要準確建模車輛的質量分布、懸架特性、輪胎特性等物理參數;傳感器仿真需要考慮傳感器的噪聲特性、測量誤差、環境干擾等因素;交通流仿真需要建立符合實際的交通參與者行為模型。隨著數字孿生技術的發展,仿真環境的真實性不斷提升,為算法驗證提供了更可靠的基礎。
封閉場地測試是連接仿真測試和開放道路測試的重要橋梁。封閉測試場能夠在可控環境下驗證自動駕駛系統的功能和性能,同時保證測試過程的安全性。國內外建立了眾多自動駕駛測試基地,如中國的國家智能網聯汽車(上海)試點示范區、美國的密歇根MCity測試中心等。這些測試場地通常配備了各種標準化的測試場景,包括城市道路、高速公路、停車場、交叉路口等,能夠系統性地驗證自動駕駛系統在不同環境下的表現。
開放道路測試是驗證自動駕駛技術實用性的最終環節。由于涉及公共安全,開放道路測試需要嚴格的安全保障和法律規范。世界各國都制定了相應的法律法規來規范自動駕駛車輛的道路測試,包括測試牌照申請、安全員配置、數據記錄要求、事故責任認定等。中國的《智能網聯汽車道路測試管理規范(試行)》為自動駕駛車輛的道路測試提供了法律框架。開放道路測試能夠驗證自動駕駛系統在真實復雜環境下的表現,發現仿真測試和封閉場地測試難以暴露的問題。
虛實結合的測試方法(Hardware-in-the-Loop,HIL)正成為測試驗證的重要發展方向。通過將真實的硬件系統與仿真環境相結合,HIL測試能夠在保證安全性的同時驗證實際硬件的性能。X-in-the-Loop測試方法包括模型在環(MiL)、軟件在環(SiL)、硬件在環(HIL)、車輛在環(ViL)等不同層次,形成了完整的測試驗證鏈條。這種分層測試方法能夠在系統開發的不同階段提供相應的驗證手段,提高開發效率,降低開發成本。
測試評價指標體系的建立對于客觀評估自動駕駛系統性能具有重要意義。傳統的安全性指標如事故率、傷亡率等需要大量的測試數據才能獲得統計意義,而自動駕駛系統的測試往往無法達到這樣的數據規模。因此,需要建立新的評價指標體系,包括功能性指標(如目標檢測準確率、路徑規劃成功率)、性能指標(如響應時間、計算效率)、舒適性指標(如加速度變化、轉向平順性)等。近年來,基于場景的測試方法受到廣泛關注,通過定義標準化的測試場景,可以更好地比較不同系統的性能。
數據驅動的測試方法也是當前的重要發展趨勢。通過收集和分析大量的實際駕駛數據,可以識別出關鍵的測試場景和邊界情況。機器學習技術被用于從海量數據中自動提取測試用例,提高測試的覆蓋率和有效性。同時,持續學習和在線測試的概念也在興起,通過在系統運行過程中持續收集數據和反饋,實現系統性能的持續優化和驗證。
第8章 產業應用現狀與發展趨勢
無人駕駛技術正在從實驗室走向產業化應用,各個細分領域都展現出不同的發展態勢和商業化前景。Vision Mamba,全球年度AI論文高引TOP 3,也被認為是Transformer最強挑戰者——Mamba架構在視覺領域的"飛躍式"進展顯示了學術界對前沿技術的持續探索。在商業化進程中,不同應用場景的技術成熟度、市場接受度、監管環境等因素都影響著產業發展的速度和方向。從技術路線來看,端到端學習方法和模塊化方法并存發展,各有適用的場景和優勢;從應用領域來看,物流配送、公共交通、乘用車等不同領域的發展節奏存在顯著差異。
乘用車自動駕駛市場是最具潛力但也最具挑戰性的應用領域。當前主流車企和科技公司都在積極布局L2+和L3級別的自動駕駛功能。理想汽車、小米汽車、華為和賽力斯等企業對發展自動駕駛業務的態度非常積極,紛紛推出智駕時間表。高速公路場景由于環境相對簡單、車輛行為較為規范,成為率先實現商業化的場景。城市NOA(Navigation on Autopilot)技術正在快速發展,多家企業推出了城市自動駕駛輔助功能。然而,L4級別的完全自動駕駛在乘用車領域仍面臨技術、法規、成本等多重挑戰。
商用車自動駕駛在特定場景下展現出更好的商業化前景。由于運營路線相對固定、商業模式清晰、對成本敏感度較低,商用車成為自動駕駛技術快速落地的重要領域。港口、礦山、園區等封閉或半封閉環境下的無人駕駛應用已經開始規模化部署。民航局近日發布了《機場無人駕駛設備應用路線圖(2021-2025年)》,體現了在特定行業領域推進無人駕駛技術應用的政策支持。物流配送車輛的無人化也在加速推進,特別是最后一公里配送場景,低速無人配送車已在多個城市開始商業化運營。
公共交通領域的自動駕駛應用具有重要的社會意義和示范效應。自動駕駛公交車、地鐵等公共交通工具的應用不僅能夠提高運輸效率,還能減少人力成本,改善服務質量。多個城市已經開展了自動駕駛公交的試運行,積累了寶貴的運營經驗。然而,公共交通的自動駕駛應用也面臨著乘客接受度、緊急情況處理、復雜路況適應等挑戰。
出行服務市場是無人駕駛技術商業化的重要戰場。Robotaxi作為共享出行的新形態,受到了資本和產業界的廣泛關注。多家公司在不同城市開展了Robotaxi的試運營服務,探索商業化運營模式。雖然目前大多數Robotaxi服務仍處于試點階段,但隨著技術成熟度的提升和成本的下降,預計未來幾年將迎來快速發展期。運營模式、盈利模式、用戶體驗等問題需要在實踐中逐步完善。
產業生態的構建對于無人駕駛技術的發展至關重要。完整的產業生態包括芯片供應商、傳感器制造商、算法開發商、整車制造商、運營服務商、基礎設施建設商等多個環節。每個環節的技術進步和成本優化都會影響整個產業的發展速度。供應鏈的穩定性和多樣性也是產業健康發展的重要因素。標準化工作在產業生態構建中發揮著重要作用,通過制定技術標準、安全標準、測試標準等,為產業發展提供規范和指引。
技術發展趨勢方面,端到端學習方法正在獲得越來越多的關注。相比傳統的模塊化架構,端到端方法能夠避免誤差累積,實現更好的整體優化效果。大模型技術在自動駕駛中的應用也是重要趨勢,通過預訓練模型的方式,可以更好地利用海量數據,提高系統的泛化能力。多模態融合、時序建模、場景理解等技術方向都是當前研究的熱點。
成本控制是影響無人駕駛技術產業化的關鍵因素。傳感器成本,特別是激光雷達的成本,一直是制約技術普及的重要因素。隨著固態激光雷達技術的發展和規模化生產,成本有望顯著下降。計算平臺的成本優化也是重要方向,通過芯片技術進步和算法優化,在保證性能的同時降低成本。商業模式創新也是降低總體成本的有效途徑,如通過服務化、租賃等方式分攤硬件成本。
| 應用領域 | 技術成熟度 | 商業化進展 | 主要挑戰 | 發展前景 |
|---|---|---|---|---|
| 乘用車(高速) | 較高 | 規模化部署 | 復雜場景適應 | 良好 |
| 乘用車(城市) | 中等 | 試點運營 | 技術復雜性高 | 中期看好 |
| 商用車(封閉場景) | 高 | 商業化運營 | 成本優化 | 優秀 |
| 公共交通 | 中等 | 示范運營 | 乘客接受度 | 穩步發展 |
| 出行服務 | 中等 | 試點服務 | 商業模式 | 長期看好 |
結論
通過對2025年8月無人駕駛技術現有技術的全面研究和深入分析,可以清晰地看到無人駕駛技術正處于從技術驗證向產業化應用轉變的關鍵階段。在感知系統方面,多傳感器融合技術日趨成熟,激光雷達與攝像頭融合的技術路線在保證安全性的同時逐步優化成本結構。決策規劃算法從傳統的模塊化架構向端到端學習方法演進,深度學習和強化學習技術的應用使得系統能夠更好地處理復雜的交通場景。控制執行系統在線控技術和先進控制算法的支撐下,實現了更加精確和可靠的車輛控制。
通信與網絡技術的發展為車路協同提供了強大的技術基礎,5G網絡和V2X技術的結合使得協同感知和協同決策成為可能,顯著擴展了單車智能的能力邊界。兩輪車智能技術作為細分領域展現出獨特的發展特點,在自平衡控制、環境感知、人機交互等方面都有針對性的技術創新。測試與驗證體系的不斷完善為技術的安全可靠應用提供了保障,仿真測試、封閉場地測試、開放道路測試相結合的多層次驗證方法已經建立。
產業應用方面,不同領域呈現出差異化的發展態勢。封閉或半封閉場景下的商用車自動駕駛已經開始規模化商業部署,乘用車高速公路自動駕駛功能快速普及,城市場景的自動駕駛正在從試點向規模化應用過渡。技術發展的總體趨勢是向著更高的智能化水平、更低的系統成本、更好的用戶體驗方向演進。
未來無人駕駛技術的發展將呈現幾個重要特點:首先是技術融合度進一步提升,單車智能與車路協同深度結合,形成更加完善的智能交通生態系統;其次是應用場景不斷擴展,從特定場景逐步向全場景覆蓋發展;第三是產業生態日趨完善,標準化體系建立,供應鏈穩定性增強;第四是安全保障體系更加完備,從技術安全、功能安全向系統安全演進。
當前無人駕駛技術仍面臨一些挑戰需要持續攻克,包括極端天氣和復雜場景下的可靠性提升、長尾場景的處理能力增強、系統成本的進一步優化、相關法規標準的完善等。但總體而言,無人駕駛技術已經展現出巨大的發展潛力和廣闊的應用前景,預計在未來幾年內將在更多領域實現規模化商業應用,為人類交通出行帶來革命性的變化。
參考文獻
[1] 艾媒咨詢. 2024-2025年中國無人駕駛汽車市場行業研究報告. 艾媒咨詢|2024-2025年中國無人駕駛汽車市場行業研究報告(附下載)-艾媒網-全球領先的新經濟行業數據分析報告發布平臺
[2] 中國報告大廳. 2025年無人駕駛汽車行業現狀分析:無人駕駛汽車市場規模達到575.3億元. 2025年無人駕駛汽車行業現狀分析:無人駕駛汽車市場規模達到575.3億元_報告大廳
[3] 中國民用航空局. 機場無人駕駛設備應用路線圖(2021-2025年). 解讀 |《機場無人駕駛設備應用路線圖(2021-2025年)》
[4] 中商情報網. 2025年中國自動駕駛行業市場前景預測研究報告(簡版). 2025年中國自動駕駛行業市場前景預測研究報告(簡版)-中商情報網
[5] 萬維易源. 2025年科技浪潮:AI與自動駕駛技術的未來展望. 2025年科技浪潮:AI與自動駕駛技術的未來展望-易源AI資訊 | 萬維易源
[6] 中國財富網. AI大模型助力 自動駕駛滲透率將加速提升. AI大模型助力 自動駕駛滲透率將加速提升_中國財富網
[7] 格隆匯. 2025年中國無人駕駛汽車技術行業市場規模與企業營收數據分析報告. 2025年中國無人駕駛汽車技術行業市場規模與企業營收數據分析報告
[8] 三個皮匠報告文庫. 2025年自動/智能/無人駕駛報告合集. 2025年自動駕駛/智能駕駛/無人駕駛報告合集(共50套打包)-一鍵下載-三個皮匠報告文庫
[9] 研精畢智調研報告網. 2025年全球無人駕駛行業概述及產業鏈結構調研報告. 2025年全球無人駕駛行業概述及產業鏈結構調研報告-研精畢智調研報告網
[10] 格隆匯. 中國無人駕駛汽車行業分析、投資前景、未來趨勢報告2025-2031年. 中國無人駕駛汽車行業分析、投資前景、未來趨勢報告2025-2031年
[11] Apollo開放平臺. Apollo激光雷達感知介紹. https://developer.apollo.auto/Apollo-Homepage-Document/Apollo_Doc_CN_6_0/上機使用教程/上機實踐Apollo激光雷達感知能力/Apollo激光雷達感知介紹
[12] OFweek激光網. 詳解自動駕駛最火傳感器——激光雷達. https://laser.ofweek.com/2023-03/ART-240002-8110-30590651.html
[13] 證券時報. 智能駕駛走向十字路口 純視覺路線"異軍突起",激光雷達未到"拋棄"時. 智能駕駛走向十字路口 純視覺路線“異軍突起”,激光雷達未到“拋棄”時
[14] 智能汽車資源網. 詳解激光雷達與攝像頭的自動駕駛感知路線之爭. 詳解激光雷達與攝像頭的自動駕駛感知路線之爭 - 智能汽車資源網
[15] 知乎. 自動駕駛汽車傳感器技術解析——激光雷達. https://zhuanlan.zhihu.com/p/77038145
[16] ams-osram. Automotive & Mobility - Exterior Sensing for ADAS. https://ams-osram.com/applications/automotive-mobility/exterior-sensing-for-adas-ad
[17] 凱基特. 自動駕駛技術的關鍵選擇,激光雷達還是視覺傳感器? 自動駕駛技術的關鍵選擇,激光雷達還是視覺傳感器?(深入探討兩種傳感器在自動駕駛領域的應用與未來趨勢) - 凱基特
[18] CSDN. 激光雷達與純視覺方案,哪個才是自動駕駛最優選? 激光雷達與純視覺方案,哪個才是自動駕駛最優選?-CSDN博客
[19] EETOP. 揭秘自動駕駛(攝像頭、雷達、激光雷達)3大傳感器系統. 揭秘自動駕駛(攝像頭、雷達、激光雷達)3大傳感器系統 - 傳感器/Mems - -EETOP-創芯網
[20] OFweek新能源汽車網. 兩輪電動車的未來:智能化、高續航、自動駕駛. https://nev.ofweek.com/2023-03/ART-71008-8420-30591228.html
[21] 36氪. 兩輪電動車上演"智能"大戰. 兩輪電動車上演“智能”大戰-36氪
[22] 無錫市政府. 電動自行車也能"自動行走". 電動自行車也能“自動行走”
[23] 搜狐. 九號自動駕駛兩輪電動車亮相:自動規劃路線 自己保持平衡. 九號自動駕駛兩輪電動車亮相:自動規劃路線 自己保持平衡_驍龍_主動_智能
[24] 文小白. 兩個輪子的新能源車與自動駕駛:未來已至. 兩個輪子的新能源車與自動駕駛:未來已至
[25] 汽車之家. 獨家 | 兩輪電動車要做自動駕駛,你敢騎么? 獨家 | 兩輪電動車要做自動駕駛,你敢騎么?
[26] 騰訊新聞. 獨家|兩輪電動車要做自動駕駛,你敢騎么? 獨家|兩輪電動車要做自動駕駛,你敢騎么?_騰訊新聞
[27] CSDN. 無人駕駛技術對兩輪電動車的購買產生影響么? 無人駕駛技術對兩輪電動車的購買產生影響么?_無人駕駛電動車買不到怎么辦-CSDN博客
[28] 維霖通(上海)通信技術有限公司. 維霖通電動兩輪車智能化方案. 維霖通電動兩輪車智能化方案 - 解決方案 - 維霖通(上海)通信技術有限公司
[29] 知乎. 飄哥翻譯:綜述自動駕駛中的深度學習(五)基于深度學習的路徑規劃和行為決策. https://zhuanlan.zhihu.com/p/88933995
[30] 研智. 人工智能在自動駕駛在決策與規劃中的應用體現在哪里?深度學習. 人工智能在自動駕駛在決策與規劃中的應用體現在哪里?深度學習-www.ytzr.com
[31] 清華大學五道口金融學院. 研究報告. https://www.pbcsf.tsinghua.edu.cn/__local/5/27/DE/D5DA8541C99C4AFD23BF42C00D5_EFF30E25_1E2F09.pdf
[32] 汽車測試網. 機器學習在汽車自動駕駛路徑規劃中的應用與挑戰. 機器學習在汽車自動駕駛路徑規劃中的應用與挑戰_智能網聯汽車_汽車測試百科_汽車測試網
[33] 電子工程專輯. 兩萬字詳解自動駕駛路徑規劃的常用算法. https://www.eet-china.com/mp/a199911.html
[34] 汽車工程. 基于深度學習的端到端車輛運動規劃方法研究. 基于深度學習的端到端車輛運動規劃方法研究
[35] 360汽車網. 自動駕駛時代的數據怎么處理 深度學習算法會成為其一優勢. 自動駕駛時代的數據怎么處理 深度學習算法會成為其一優勢- 360汽車網
[36] 計算機應用研究. 基于強化學習的自動駕駛汽車路徑規劃方法研究綜述. 基于強化學習的自動駕駛汽車路徑規劃方法研究綜述 - 《計算機應用研究》編輯部官方網站
[37] 知乎. 自動駕駛中基于深度學習的預測和規劃融合方法綜述. https://zhuanlan.zhihu.com/p/660532517
[38] CSDN. 自動駕駛中基于深度學習的預測和規劃融合方法綜述. 自動駕駛中基于深度學習的預測和規劃融合方法綜述-CSDN博客
[39] CSDN. 自動駕駛2022-2024年論文匯總與解析. 自動駕駛2022-2024年論文匯總與解析_關于自動駕駛汽車的論文-CSDN博客
[40] 知乎. 2025 年國際自動駕駛汽車驗證會議IEEE IAVVC征文. https://zhuanlan.zhihu.com/p/22087518528
[41] 騰訊新聞. 2025自動駕駛最大技術「黑馬」:AI論文高引TOP3,比Transformer快2.8倍,內存節省86.8%. 2025自動駕駛最大技術「黑馬」:AI論文高引TOP3,比Transformer快2.8倍,內存節省86.8%_騰訊新聞
[42] 合肥工業大學. 2024國際產學研用合作會議(合肥)分會場——新能源與智能網聯汽車研討會自動駕駛平行論壇報告八則. 2024國際產學研用合作會議(合肥)分會場——新能源與智能網聯汽車研討會自動駕駛平行論壇報告八則-合肥工業大學
[43] PRAI 2025. 第八屆模式識別與人工智能國際會議. PRAI 2025 | 第八屆模式識別與人工智能國際會議 Pattern Recognition and Artificial Intelligence
[44] 五邑大學. 電子與信息工程學院翟懿奎教授團隊在國際著名期刊IEEE T-ITS發表高水平學術論文. 電子與信息工程學院翟懿奎教授團隊在國際著名期刊IEEE T-ITS發表高水平學術論文-電子與信息工程學院
[45] 愛科會易. 2025年第十屆智能交通工程國際會議(ICITE 2025). 2025年第十屆智能交通工程國際會議(ICITE 2025)-愛科會易
[46] China Journal of Highway and Transport. Review of Indicator Systems for Driving Behavioral Ability Evaluation of Autonomous Vehicles. Review of Indicator Systems for Driving Behavioral Ability Evaluation of Autonomous Vehicles
[47] 香港中文大學(深圳). 喜訊 | 理工學院師生共4篇論文被國際人工智能領域頂級會議AAAI 2025收錄. 喜訊 | 理工學院師生共4篇論文被國際人工智能領域頂級會議AAAI 2025收錄 | 香港中文大學(深圳)理工學院
[48] 知乎. 為什么車聯網(V2X)技術對智能交通系統至關重要? https://www.zhihu.com/question/698507551
[49] Qualcomm. Qualcomm發布突破性C-V2X車聯網解決方案. Qualcomm發布突破性C-V2X車聯網解決方案 支持汽車道路安全為未來自動駕駛鋪平道路 | Qualcomm
[50] 美格智能. 讓聰明的車連接智慧的路,C-V2X開啟智慧出行生活. 讓聰明的車連接智慧的路,C-V2X開啟智慧出行生活—美格智能—全球領先的無線通信模組及解決方案提供商
[51] 中國政府網. 五部委關于開展智能網聯汽車"車路云一體化"應用試點工作的通知. 五部委關于開展智能網聯汽車“車路云一體化”應用試點工作的通知_國務院部門文件_中國政府網
[52] Mouser. 深挖車聯網新架構:5G與車聯網會擦出怎樣的火花? https://www.mouser.cn/blog/cn-new-v2x-architectures
[53] 通信世界網. 蜂窩車聯網(C-V2X)技術發展、應用及展望. 蜂窩車聯網(C-V2X)技術發展、應用及展望_通信世界網
[54] 斯潤車聯網. 初探車聯網V2X技術. 初探車聯網V2X技術 - 車聯網應用服務 - 研究 - 斯潤車聯網
[55] 汽車測試網. 5G +V2X是加速自動駕駛汽車未來的關鍵. 5G +V2X是加速自動駕駛汽車未來的關鍵_汽車技術__汽車測試網
[56] 中國通信學會. 技術報告. https://www.china-cic.cn/upload/202012/09/de38bbae1ea14b70b512606ecd59671c.pdf
[57] 知乎. 自動駕駛中的V2X車聯網. https://zhuanlan.zhihu.com/p/58733768
nlan.zhihu.com/p/58733768
顯著提升一次性穿刺器產品合格率)

)



![c語言中的數組可以用int a[3]來創建。寫一次int就可以了,而java中要聲明兩次int類型像這樣:int[] arr = new int[3];](http://pic.xiahunao.cn/c語言中的數組可以用int a[3]來創建。寫一次int就可以了,而java中要聲明兩次int類型像這樣:int[] arr = new int[3];)
)

)

)

)





)