
文章目錄
- 關于工具箱
- 程序簡介
- 代碼概述
- 核心功能與步驟
- 運行結果
- MATLAB代碼
關于工具箱
本文所述的代碼需要基于PSINS工具箱,工具箱的講解:
- PSINS初學指導:https://blog.csdn.net/callmeup/article/details/137087932
本文為二維平面上的定位,另有三維的:
- 【PSINS】以速度和位置作為觀測量(即6維觀測量)的組合導航濾波,EKF實現,提供可直接運行的MATLAB代碼:https://blog.csdn.net/callmeup/article/details/144404734?spm=1011.2415.3001.5331
程序簡介
代碼概述
本代碼實現了一個在二維平面上,采用擴展卡爾曼濾波(EKF) 對捷聯慣性導航系統(SINS) 與外部觀測(模擬GPS位置和DVL速度計) 進行組合導航的完整仿真流程。它使用專業的慣性導航算法工具箱 PSINS,模擬了載體的運動軌跡、IMU傳感器誤差,并通過EKF算法融合慣性解算結果與外部觀測信息,最終對濾波后的導航精度(姿態、速度、位置)進行了詳盡的評估和可視化。
核心功能與步驟
代碼的執行流程清晰地分為以下幾個階段:
-
環境初始化與軌跡生成 (
trjsimu)- 清理工作區,設置隨機數種子以確保結果可重復。
- 調用
glvs和psinstypedef載入PSINS工具箱的全局常量并定義系統類型。 - 使用
trjsegment和trjsimu函數生成一條復雜的模擬軌跡,包括勻速、加速、左轉協調轉彎等多種機動動作,并計算出理想的載體姿態、速度、位置(avp)和IMU數據(imu)。
-
傳感器誤差模擬與系統初始化
- 使用
imuerrset定義IMU的陀螺儀和加速度計誤差參數(零偏、白噪聲)。 - 使用
imuadderr將上述誤差添加到理想IMU數據中,模擬真實傳感器輸出。 - 設置初始導航參數的誤差 (
avperrset),并初始化慣性導航解算 (insinit) 和卡爾曼濾波器 (kfinit)。
- 使用
-
擴展卡爾曼濾波 (EKF) 主循環
- 時間更新(預測):讀取帶噪聲的IMU數據,通過
insupdate進行慣性導航解算,推算出最新的姿態、速度和位置。同時,更新EKF的狀態轉移矩陣和預測協方差矩陣。 - 量測更新(校正):在固定的時間間隔(例如每秒),模擬GPS接收機提供經緯度觀測,DVL提供水平速度觀測(在真實值上添加了噪聲)。將INS解算出的位置/速度與外部觀測值進行比較,得到量測殘差,并用EKF公式校正INS的誤差狀態(包括姿態誤差、速度誤差、位置誤差以及IMU零偏估計)。最后通過
kffeedback將誤差狀態反饋給INS,修正其導航結果。
- 時間更新(預測):讀取帶噪聲的IMU數據,通過
-
結果分析與可視化
- 這是代碼非常豐富的部分,它繪制了大量圖表來評估EKF的性能:
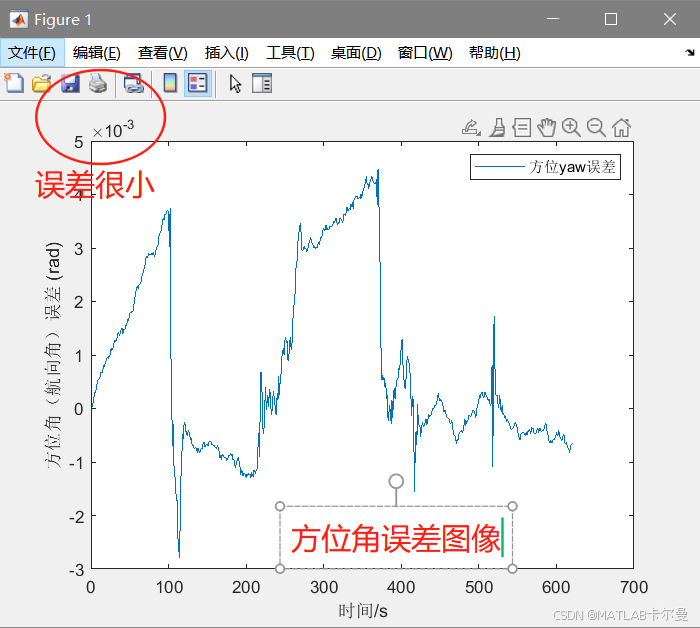
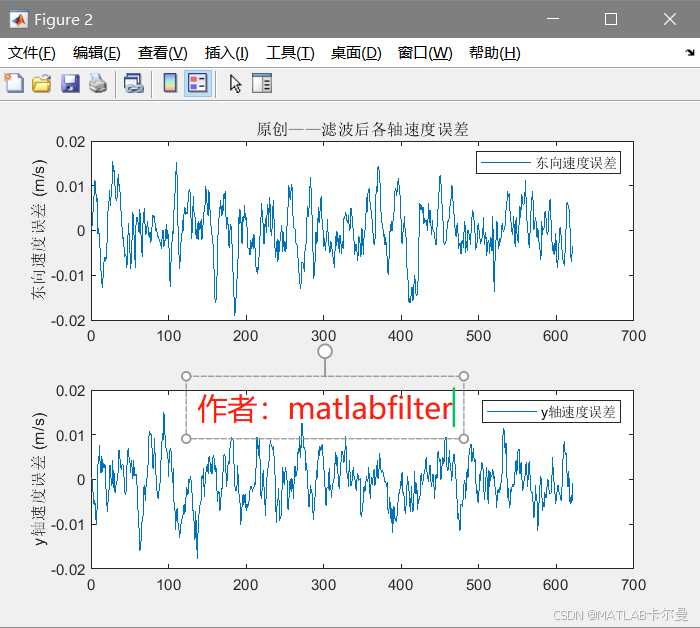
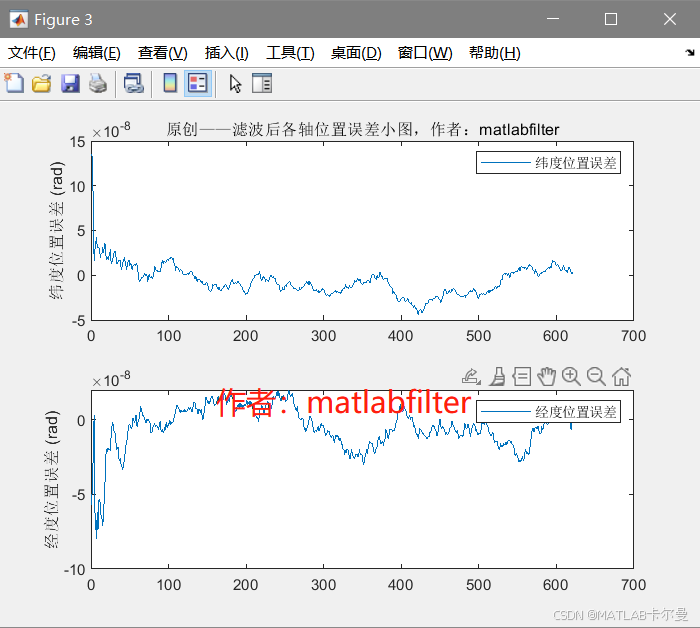
- 誤差時序圖:繪制了航向角、東向/北向速度、緯度/經度隨時間變化的誤差。
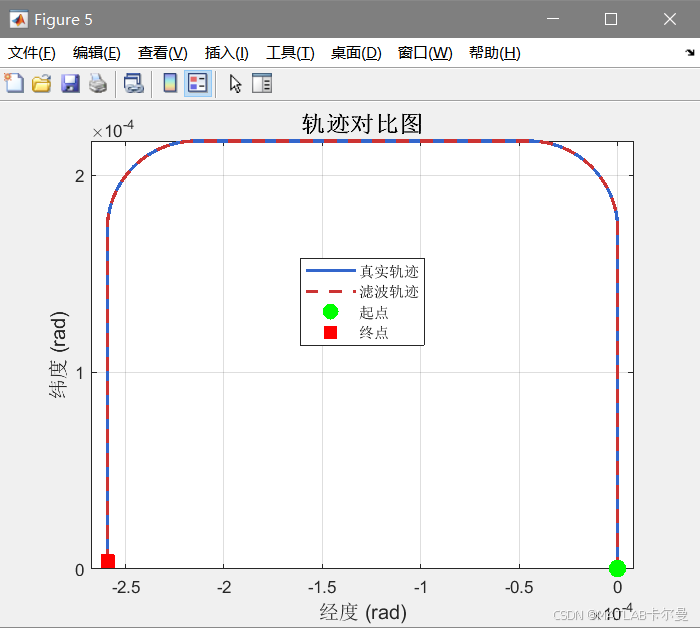
- 軌跡對比圖:將濾波后的估計軌跡與真實軌跡進行對比,清晰展示濾波效果。
- 累積分布函數圖 (CDF):分析速度誤差的統計分布。
- 位置誤差熱力圖:在二維平面上用顏色直觀顯示不同區域的定位誤差大小。
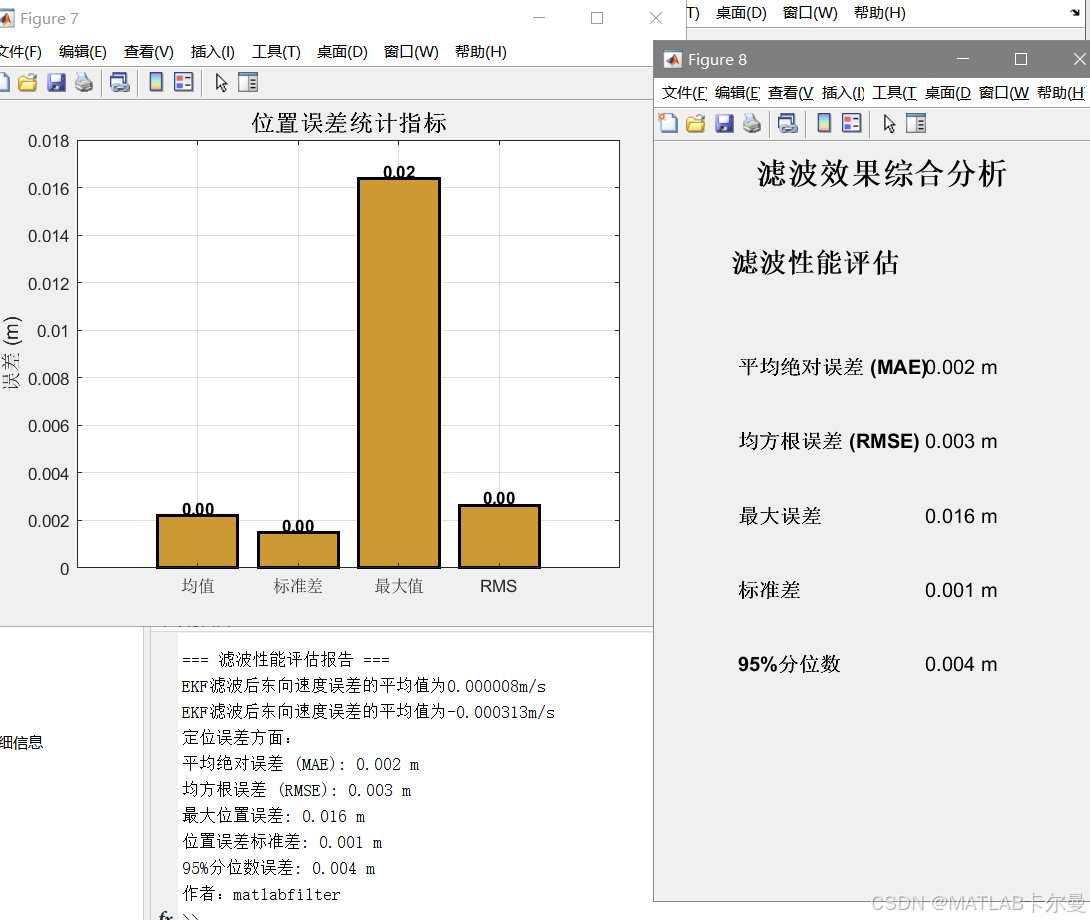
- 誤差統計條形圖:計算并顯示位置誤差的均值、標準差、最大值和均方根誤差(RMS)。
- 性能評估表:在圖形和命令行中輸出全面的量化指標,如MAE(平均絕對誤差)、RMSE(均方根誤差)、95%分位數等。
- 這是代碼非常豐富的部分,它繪制了大量圖表來評估EKF的性能:
關鍵技術點:
- 算法:擴展卡爾曼濾波 (EKF)
- 模型:15狀態誤差模型(3個姿態誤差、3個速度誤差、3個位置誤差、3個陀螺零偏、3個加計零偏)
- 觀測值:二維平面上的速度(東向、北向)和位置(緯度、經度)
運行結果
二維軌跡圖像:
航向角誤差曲線:
速度誤差時序圖:
位置誤差時序圖:
誤差統計特性:
MATLAB代碼
部分代碼如下:
% 【PSINS】二維平面上的位置、速度為觀測的154,濾波方法為EKF
% 作者 :matlabfilter
% 2025-08-20/Ver1
% 清空工作空間,清除命令窗口,關閉所有圖形窗口
clear; clc; close all;
rng(0); % 設置隨機數種子為0,以確保結果可重復
glvs % 調用全局變量設置
psinstypedef(153); % 設置PSINS類型ts = 0.1; % sampling interval
avp0 = [[0;0;0]; [0;0;0]; [0;0;0]]; % 初始化avp
traj_ = [];
%% 軌跡設置
seg = trjsegment(traj_, 'init', 0);
seg = trjsegment(seg, 'uniform', 100);
seg = trjsegment(seg, 'accelerate', 10, traj_, 1);
seg = trjsegment(seg, 'uniform', 100);
seg = trjsegment(seg, 'coturnleft', 45, 2, traj_, 4);
seg = trjsegment(seg, 'uniform', 100);
seg = trjsegment(seg, 'coturnleft', 45, 2, traj_, 4);
seg = trjsegment(seg, 'uniform', 100);
seg = trjsegment(seg, 'deaccelerate', 5, traj_, 2); %2
seg = trjsegment(seg, 'uniform', 100);
% generate, save & plot
trj = trjsimu(avp0, seg.wat, ts, 1);% 初始設置
[nn, ts, nts] = nnts(2, trj.ts); % 獲取時間序列的參數
% imuerr = imuerrset(0.03, 100, 0.001, 5); % (注釋掉的)設置IMU誤差參數
imuerr = imuerrset(8, 14, 0.18, 57); % 設置IMU誤差參數
imu = imuadderr(trj.imu, imuerr); % 對IMU數據添加誤差
% imuplot(imu); % (注釋掉的)繪制IMU數據% 設置初始姿態誤差
davp0 = avperrset(0.1*[1; 1; 1], 0, [1; 1; 3]);%% 速度觀測EKF
ins = insinit(avpadderr(trj.avp0, davp0), ts); % 初始化慣性導航系統
完整代碼:
如有導航、定位相關的代碼定制需求,請通過下方卡片聯系作者


)









)





)
之進銷存庫存管理—仙盟創夢IDE)