基本信息
題目:Splat-LOAM: Gaussian Splatting LiDAR Odometry and Mapping
來源:ICCV 2025
學校:Sapienza University of Rome
是否開源:https://github.com/rvp-group/Splat-LOAM
摘要:純激光3DGS!
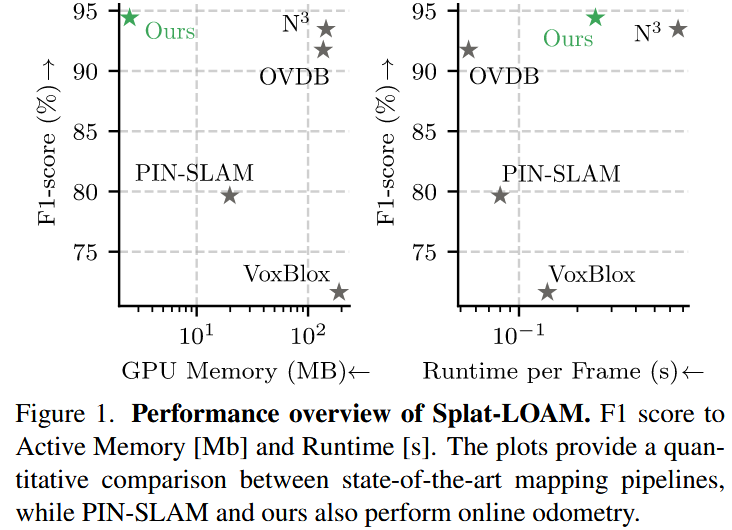
激光雷達提供了精確的幾何測量,使其在自運動估計和重建任務中具有重要價值。盡管它取得了成功,但對環境進行準確和輕量級的表示仍然是一個挑戰。經典的和基于NeRF的解決方案都必須在精度與內存和處理時間之間進行權衡。在這項工作中,我們利用高斯拋雪球方法的最新進展,開發了一種新的激光雷達里程計和地圖繪制管道,它完全依賴于高斯圖元來表示其場景。利用球面投影,我們從LiDAR測量數據中唯一地驅動基元的精化。實驗表明,我們的方法匹配了當前的配準性能,同時以最小的GPU需求實現了映射任務的SOTA結果。這一效率使其成為機器人實時估計任務中進一步探索和潛在采用的有力候選者。
Introduction
????????激光在定位和重建作用很大。現有的LSLAM,全局地圖只是把每幀的觀測疊加在一起,就導致點云數量龐大,難以實時操作全局地圖。有些方法運用面元、Meshes作為地圖表示。
????????最近有很多基于Nerf的工作,首個Nerf-SLAM:iMap。
????????明確可以替代Nerf的方法:3DGS。該方法利用3D高斯形狀的基元和一個可微的、基于瓦片的光柵化器來生成外觀精確的表示。
????????3DGS的一個問題涉及到原始初始化。在SFM提供的點很少或沒有的區域,自適應致密化往往會失敗,通常會產生欠重建區域。LiDAR傳感器在解決這個問題時非常方便,因為它提供了顯式的空間測量,可以用來初始化局部表示。
????????但是沒有人嘗試3DGS在純Lidar數據下的性能。這些見解導致我們開發了Splat - LOAM,第一個激光SLAM的Pipeline,它僅使用高斯基元作為其表面表示。我們的系統在部分計算需求下展示了與其他SOTA管道相媲美的結果,為自主系統中的實時感知提供了一個額外的研究方向。
????????本文貢獻如下:
- 一個可微的,基于瓦片的2D高斯球面框架的光柵化器。
- 一個mapping pipeline,允許將連續的LiDAR測量合并成2D高斯表示。
- 一個跟蹤方案,利用3D和2D表示來track新的measurement和估計傳感器的ego運動。
Related Works
Classic LiDAR Odometry and Mapping
LOAM、Lego-LOAM、MD-SLAM、LO-Net、PWCLO-Net、CT-ICP、MAD-ICP、SLAMesh
Implicit Methods
SHINE-Mapping、N3-Mapping、NeRFLOAM、LONER、PIN-SLAM、
Gaussian Splatting
MM-Gaussian、LIV-GaussMap、LiDAR-GS、GSLiDAR
Method
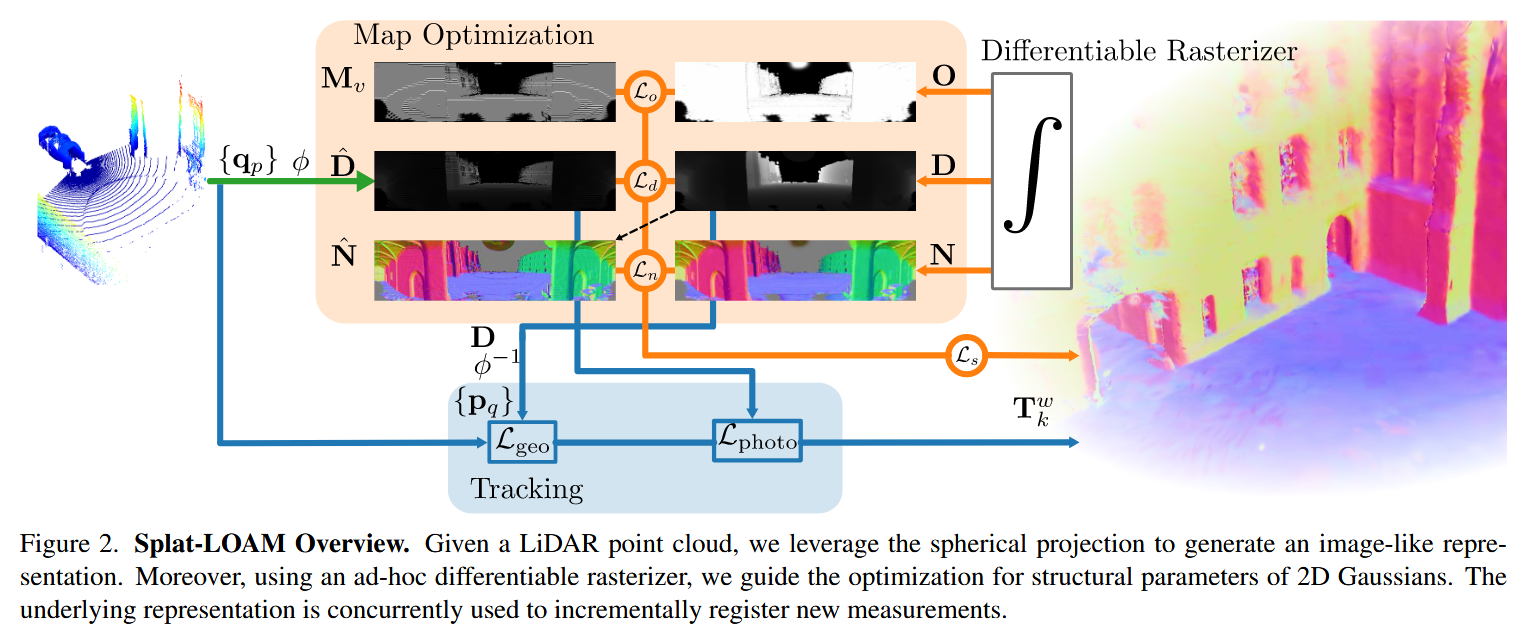
????????論文提出了一種新穎的基于2D高斯原語的LiDAR里程計與地圖構建方法,用于處理LiDAR點云數據,實現高效的機器人定位與環境建模。傳統的高斯 splatting(高斯濺射)方法主要用于基于針孔相機模型的圖像渲染,而LiDAR提供的是360°全景點云數據,因此需要一種新的投影模型和表示方法。論文采用了球面投影模型將LiDAR點云轉換為類圖像表示,并基于2D高斯原語進行場景建模、里程計估計和渲染。?
3.1. Spherical Projection Model
????????LiDAR傳感器提供的是360°全景點云數據,與傳統針孔相機模型不同,無法直接應用基于針孔投影的高斯 splatting。因此,論文提出了一種球面投影模型,將3D點云投影到2D圖像平面,形成類圖像的表示(例如深度圖),便于后續優化高斯原語。
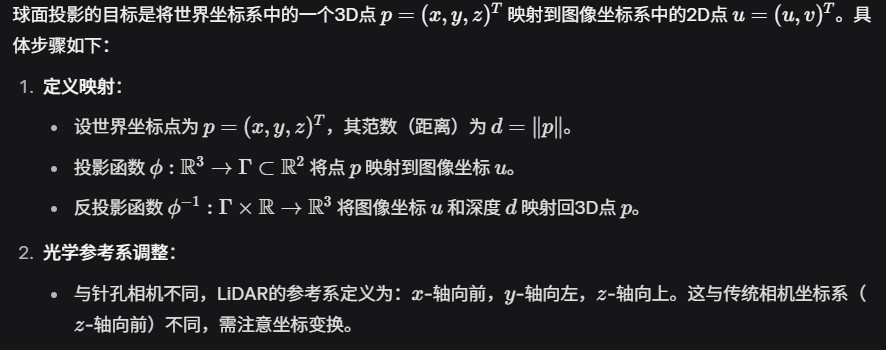

(比較經典的激光投影模型)?
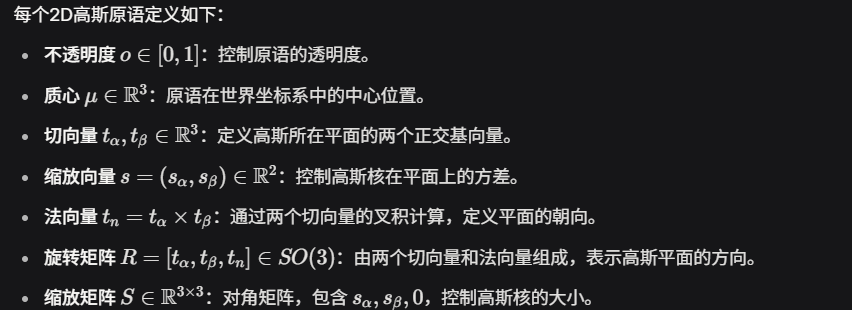
?3.2. 2D Gaussian Splatting
論文選擇2D高斯原語作為場景的唯一表示形式,原因是:
- 2D高斯具有薄結構,適合表示表面。
- 顯式編碼表面法向量,便于精確的表面重建。
- 支持高效的里程計估計、地圖構建和渲染。
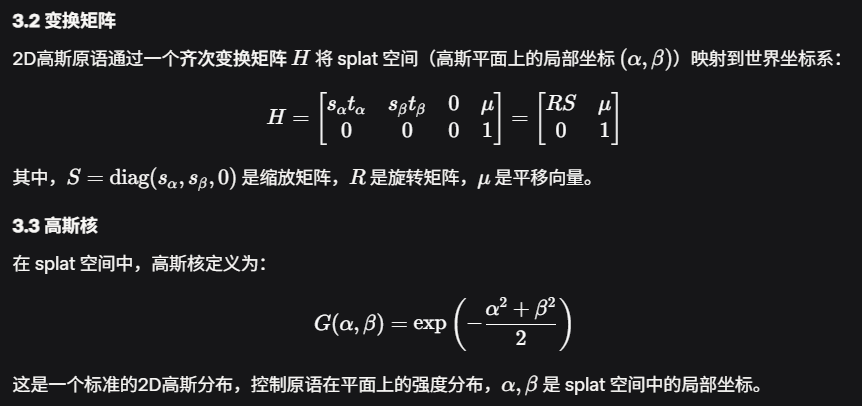
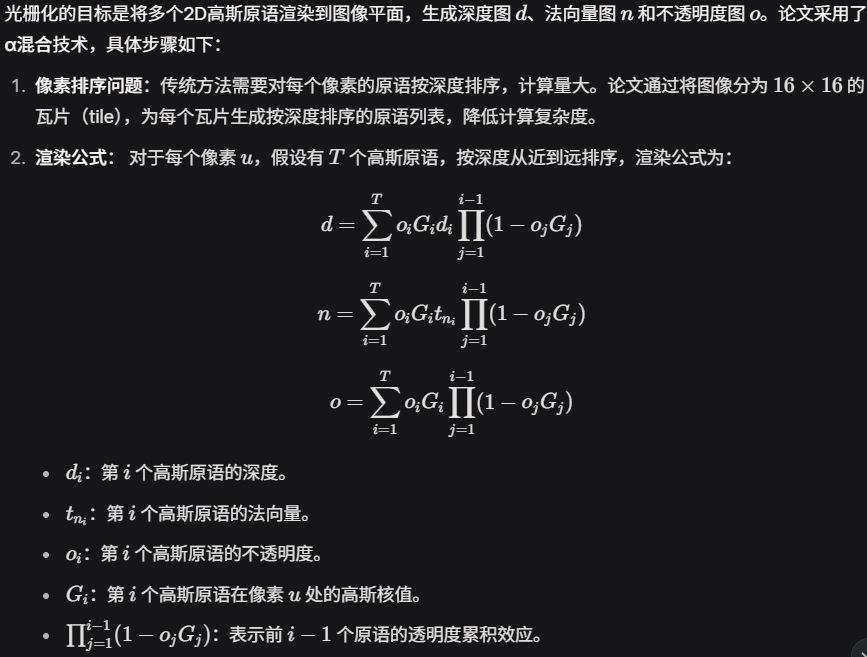
3.2.1. Rasterization
3.2.3. Bounding Box Computation
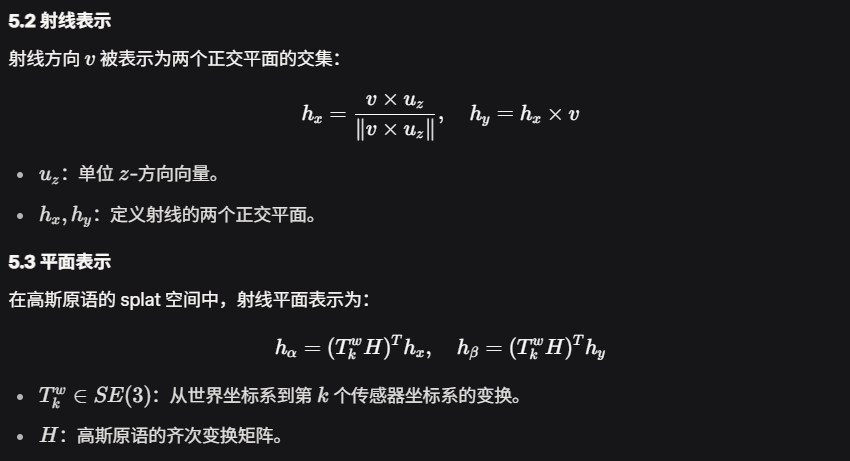
為了精確計算射線與高斯原語的交點,論文提出了一種基于射線-平面交點的方法。每個像素? 對應一條射線,方向為?
,需要在高斯球的平面中找到交點。
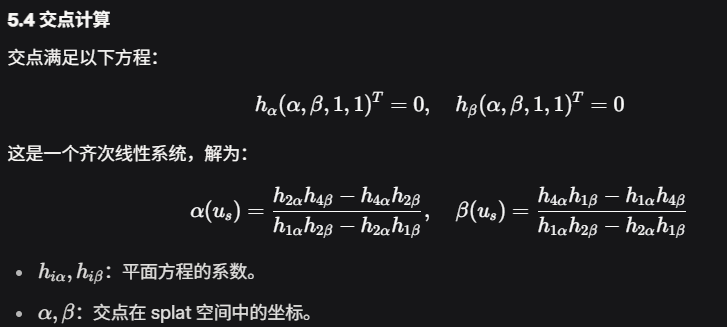
?3.2.3. Bounding Box Computation
為了高效光柵化,需要為每個高斯球計算其在圖像平面上的邊界框。球面投影的特殊性(水平邊界存在坐標奇異性,例如? )增加了計算難度。
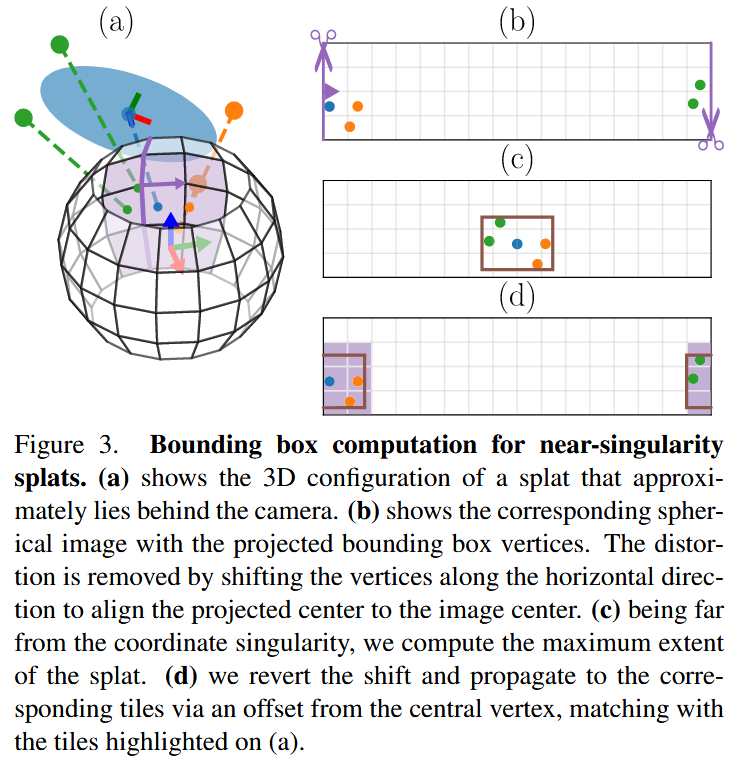
- 計算 splat 空間邊界框:
- 在 splat 空間中,計算高斯球的 3σ? 邊界框(覆蓋高斯分布的主要區域)。
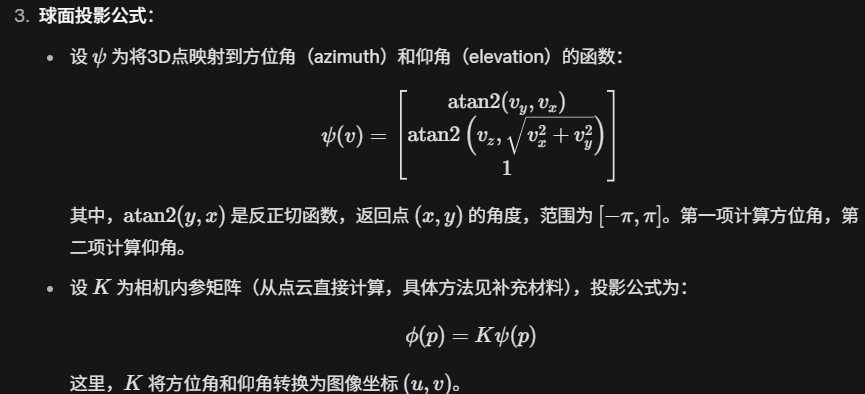
- 使用球面投影公式?
? 將邊界框的頂點投影到圖像平面。
- 處理坐標奇異性:
- 將邊界框的中心頂點平移到圖像中心,避免投影到水平邊界
? 附近導致的奇異性。
- 計算邊界框的水平范圍,考慮球面圖像的周期性。
- 將邊界框的中心頂點平移到圖像中心,避免投影到水平邊界
- 傳播到瓦片:
- 將高斯原語的ID傳播到覆蓋的瓦片中,考慮坐標奇異性,確保邊界框一致性。
3.3. Odometry And Mapping
介紹了基于2D高斯原語的里程計與地圖構建方法,核心思想是利用關鍵幀策略(keyframing)來優化局部地圖,并通過幾何和光度一致性進行幀到模型的配準。主要內容包括:
- 局部模型初始化:根據輸入的LiDAR點云初始化高斯原語模型。
- 局部模型優化:通過幾何一致性、光度一致性和正則化項優化高斯原語的參數。
- 幀到模型配準:結合幾何和光度損失,估計傳感器的位姿(里程計)。
該方法通過關鍵幀策略減少了連續積分的計算負擔和偽影影響,同時保證了實時性。每個局部地圖被定義為一個獨立的高斯模型? ,其中每個高斯球?G 由質心 μ 、協方差 Σ 和不透明度? o 定義。
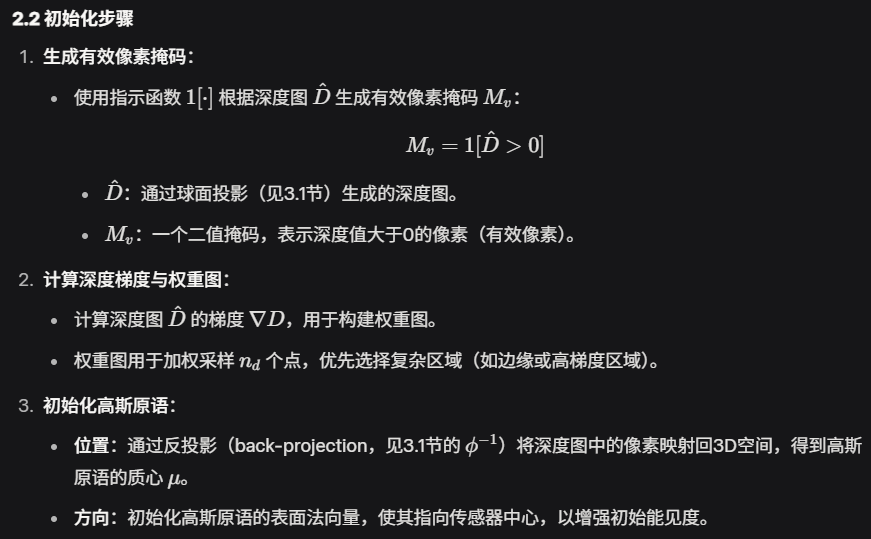
3.3.1. Local model initialization
局部模型初始化是在系統啟動或滿足特定條件(如能見度變化)時,根據輸入的LiDAR點云生成一個新的高斯原語模型。目標是快速生成初始的高斯原語集合,作為后續優化的基礎。
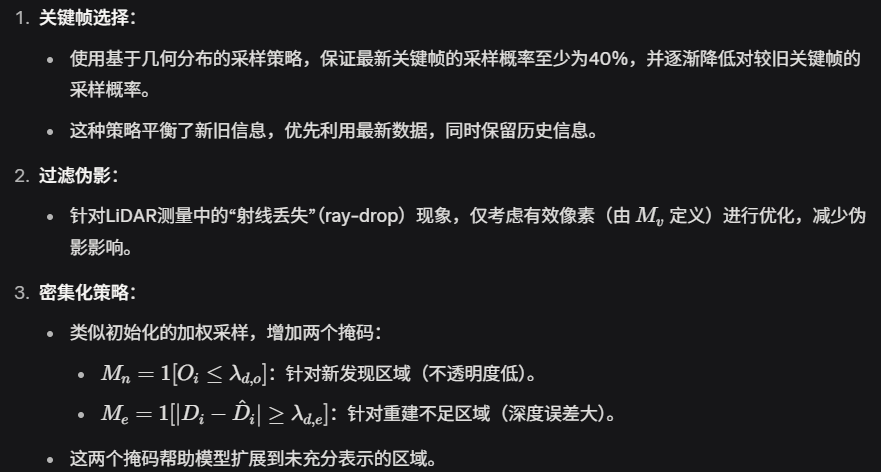
3.3.2. Local Model Refinement
局部模型優化通過對關鍵幀的高斯原語進行有限次迭代(次數為? ?),優化其參數(位置 μ 、協方差 Σ 、不透明度 o 等),以提高幾何和光度一致性。優化過程結合了多種損失函數,確保模型的準確性和魯棒性。
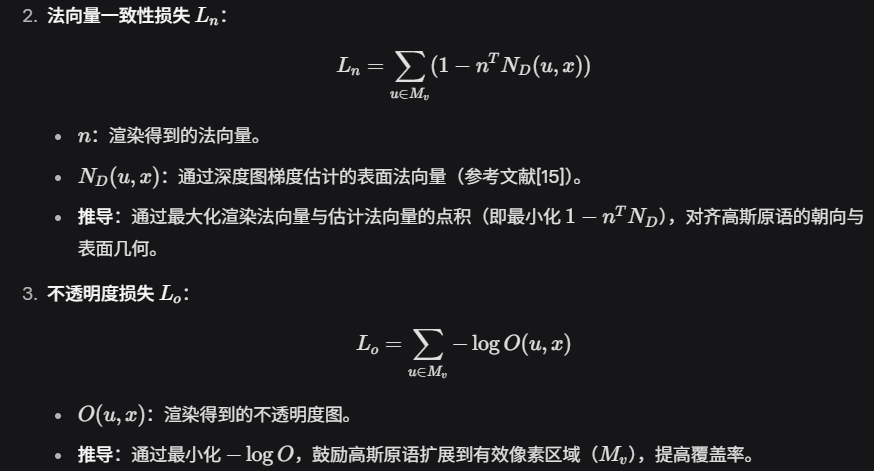
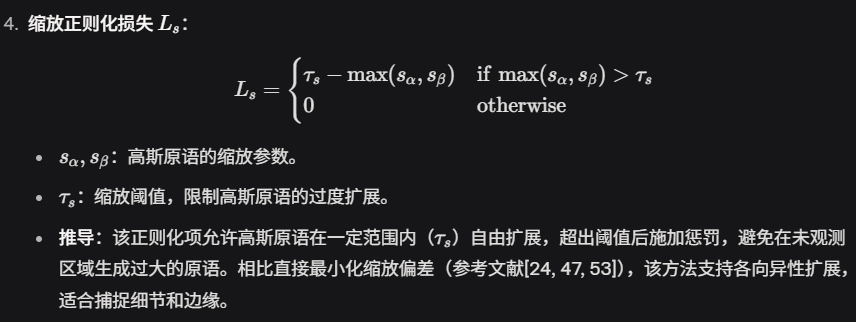
?損失函數如下:
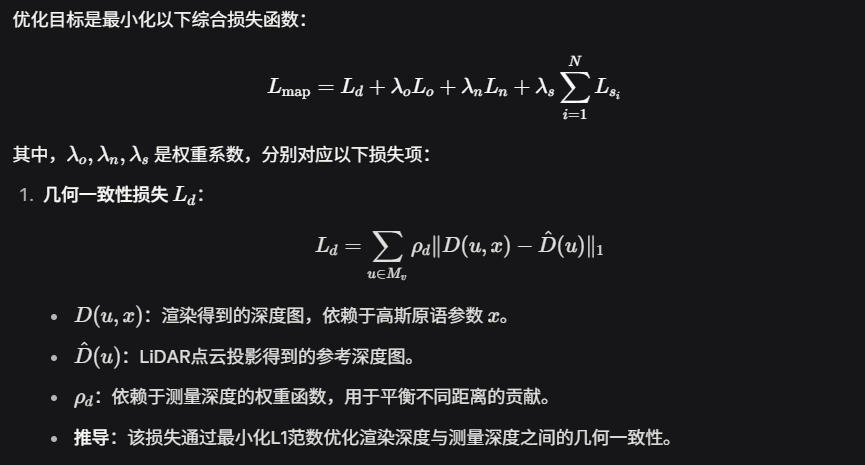
- 避免不透明度重置:論文未采用不透明度重置策略,以防止“災難性遺忘”(catastrophic forgetting),即丟失先前優化的信息。
- 各向異性支持:縮放正則化允許高斯原語在不同方向上具有不同的大小,增強了對復雜幾何(如邊緣)的建模能力。
3.3.3. Frame-To-Model Registration
????????幀到模型配準的目標是估計新關鍵幀的位姿(傳感器在全局坐標系中的變換? ?),通過結合幾何一致性和光度一致性優化里程計。配準過程利用了渲染的局部模型(深度圖? D、法向量圖等)與當前LiDAR點云的測量數據。
????????總里程計損失由幾何損失和光度損失組成:

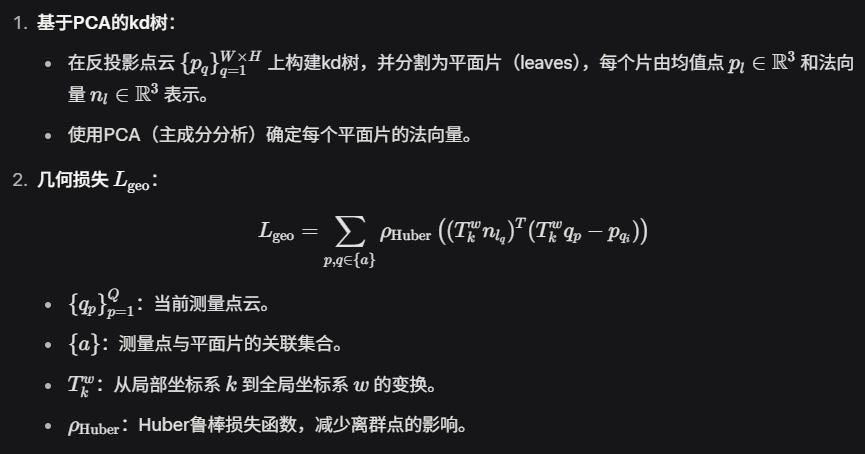
幾何配準采用以下方法:
?光度配準:


位姿更新:?
實驗
硬件環境
- 處理器:Intel Core i9-14900K @ 3.20GHz
- 內存:64GB
- 顯卡:NVIDIA RTX 4090(24GB顯存) 此硬件配置支持高效處理大規模點云數據和神經網絡計算,確保實驗結果的可靠性和實時性。
BenchMark
里程計基線:
- 點到平面ICP:最簡單的點到平面迭代最近點(ICP)方法,作為基準。
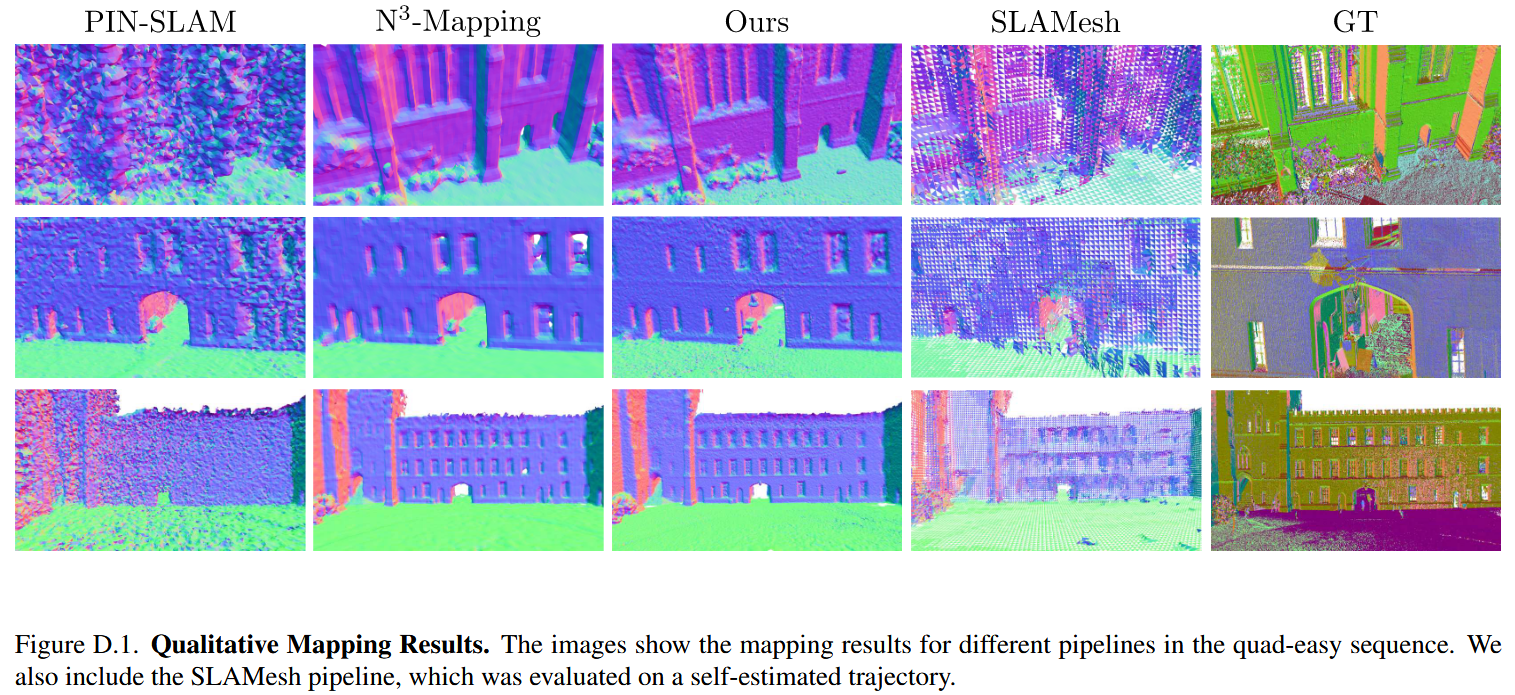
- SLAMesh:通過高斯過程同時估計場景的網格表示并進行配準,但無法使用地面真實位姿(ground-truth poses)運行官方實現,因此未包含在定量比較中。
- MAD-ICP:基于PCA的KD樹森林進行高精度配準,利用局部幾何特征提高配準效率。
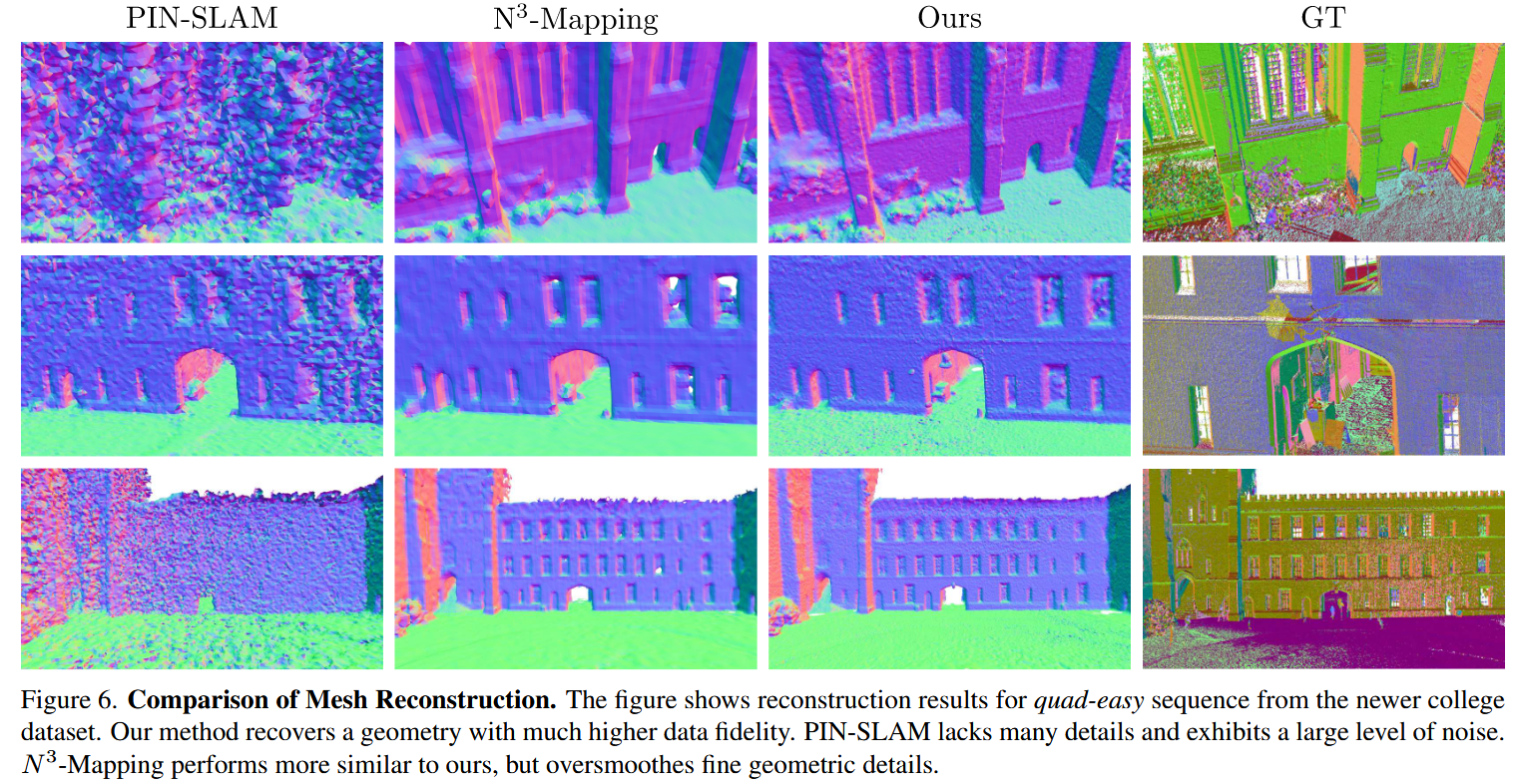
- PIN-SLAM:最先進的隱式LiDAR SLAM方法,使用神經點(neural points)表示場景的簽名距離場(SDF),并采用無對應點的點到隱式配準方案。
地圖構建基線:
- OpenVDB:提供魯棒的體視數據結構處理3D點云,適合高效存儲和查詢。
- VoxBlox:結合自適應權重和分組射線投射(ray-casting),實現高效且準確的截斷簽名距離函數(TSDF)整合。
- N^3-Mapping:基于神經隱式的非投影SDF地圖構建方法,利用法向量引導生成更精確的SDF,是離線LiDAR地圖構建的SOTA方法。
- PIN-SLAM:通過marching cubes算法從隱式SDF生成網格,兼顧里程計和地圖構建
數據集
- Newer College Dataset (NC):
- 描述:使用手持Ouster OS0-128 LiDAR在牛津大學校園(結構化和植被區域)采集的數據。
- 特點:提供厘米級精度的地面真實位姿和點云地圖(通過Leica BLK360掃描儀生成)。
- 用途:適合評估SLAM系統在結構化和自然環境中的性能。
- A Vision Benchmark in Rome (VBR):
- 描述:在羅馬使用車載OS1-64和手持OS0-128 LiDAR采集,涵蓋大規模城市場景(如狹窄街道、動態物體)。
- 特點:通過融合LiDAR、IMU和RTK GNSS數據提供厘米級精度的地面真實位姿。
- 用途:測試方法在動態城市環境中的魯棒性。
- Oxford Spires:
- 描述:使用手持Hesai QT64 LiDAR(360°水平視場、104°垂直視場、64通道、60米范圍)在牛津大學多個地標(如Keble College、Bodleian Library、Radcliffe Observatory)采集。
- 特點:提供由測繪級3D激光掃描儀生成的先驗地圖,用于地面真實位姿估計和地圖評估。
- 用途:評估室內外場景的定位和重建,測試方法對不同細節水平的適應性。
- Mai City:
- 描述:使用模擬LiDAR(120米范圍)在虛擬城市環境中通過射線投射生成的無誤差、無運動畸變點云數據。
- 特點:選擇01和02序列,模擬不同垂直分辨率的場景。
- 用途:測試方法在理想條件下的性能,作為對照實驗。










,解決error: Arithmetic Underflow in createSubscription)





)
![RabbitMQ:解鎖高效消息傳遞的密碼[特殊字符]](http://pic.xiahunao.cn/RabbitMQ:解鎖高效消息傳遞的密碼[特殊字符])

