文章目錄
- RTC實時時鐘與BKP
- Unix時間戳
- UTC/GMT
- 時間戳轉換
- 時間戳轉換
- BKP簡介
- BKP基本結構
- 1. 電池供電模塊(VBAT 輸入)
- 2. 侵入檢測模塊(TAMPER 輸入)
- 3. 時鐘輸出模塊(RTC 輸出)
- 4. 內部寄存器組
- RTC簡介
- RTC時鐘源
- RTC框圖
- 1. 硬件架構與區域劃分
- 2. 預分頻器與時鐘處理
- 3. 計數計時與中斷邏輯
- 4. 低功耗與待機特性
- RTC基本結構
- 硬件電路
- 1. 備用電池供電電路
- 2. 外部低速晶振(LSE)電路
- 3. 引腳功能與復用
- 4. 硬件設計規范
- RTC操作注意事項
- 1. 使能 BKP 和 RTC 訪問(時鐘與權限)
- 2. 讀取 RTC 前等待 RSF(Registers Synchronized Flag) 同步標志
- 3. 寫入 RTC 前進入配置模式(CNF 位 Configuration Flag)
- 4. 寫操作等待 RTOFF(RTC Register Transfer Ongoing Flag) 位(前次寫結束)
- BKP 庫函數介紹
- 實時時鐘
- RCC有關庫函數
- RTC有關庫函數
- 實時時鐘代碼編寫步驟
RTC實時時鐘與BKP
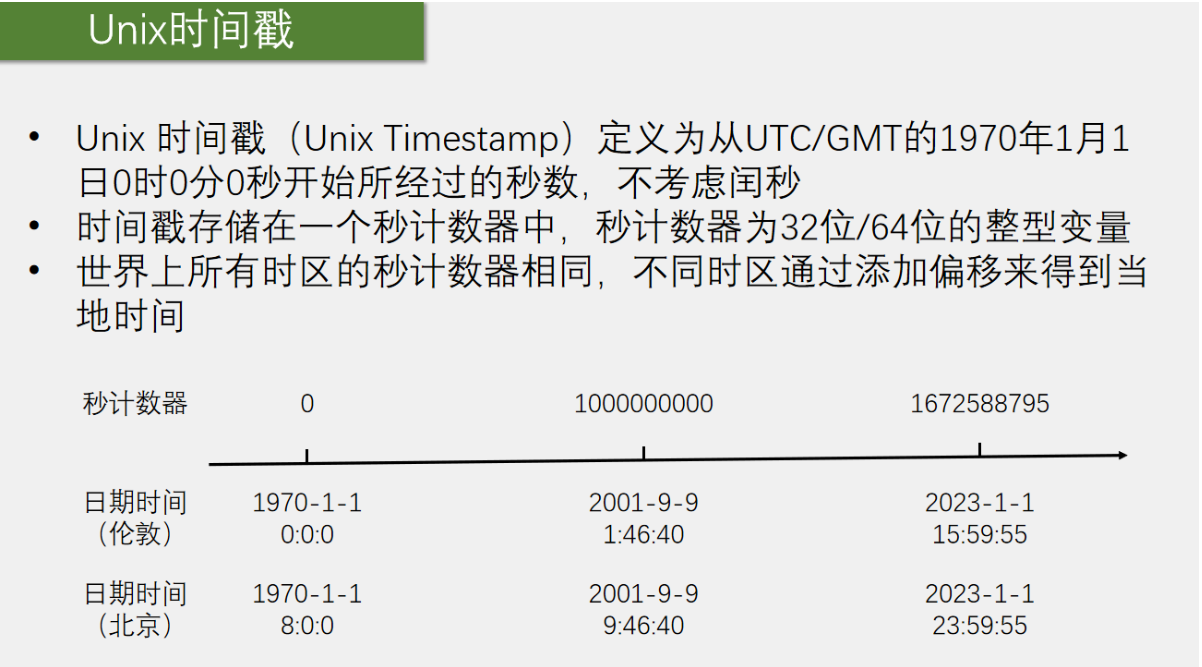
Unix時間戳
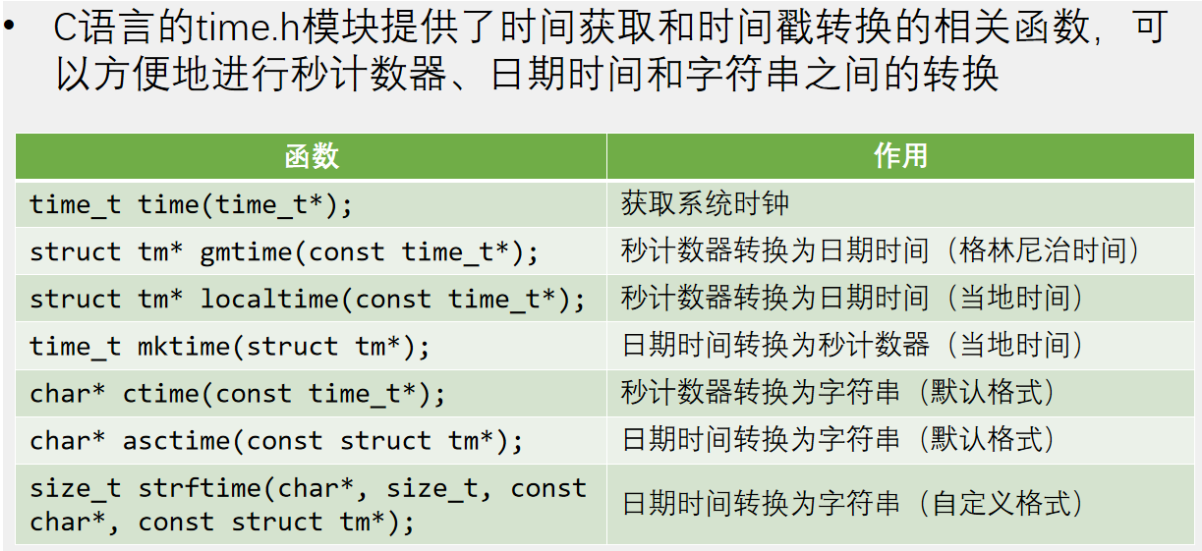
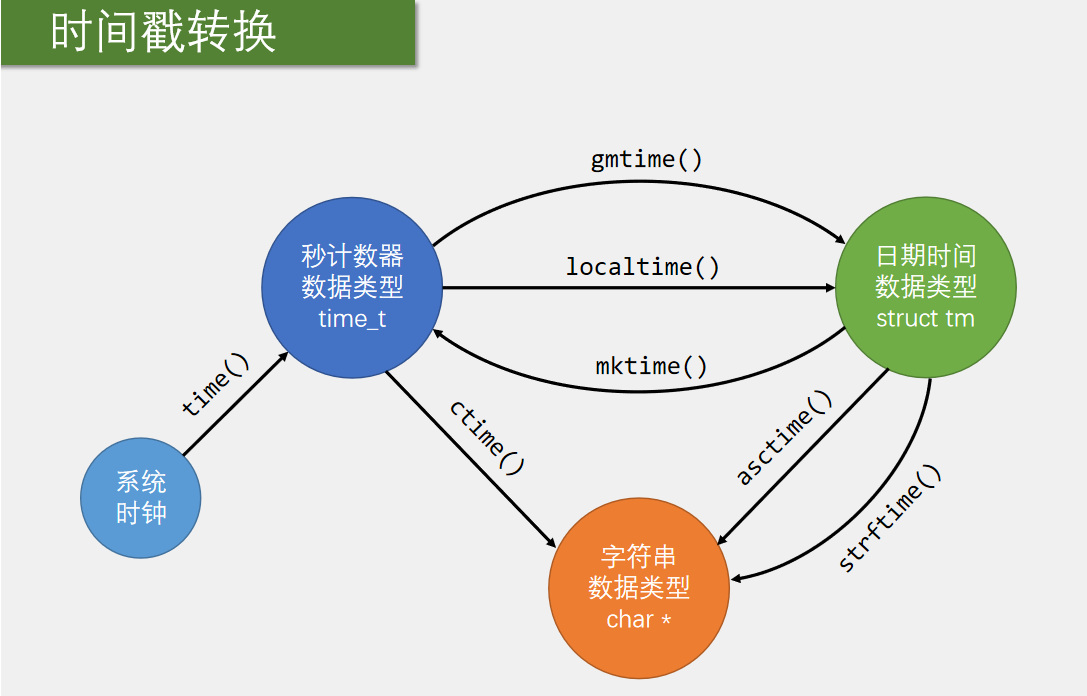
可以使用time.h,頭文件中的函數將 時間戳轉化為各種類型的時間。
UTC/GMT
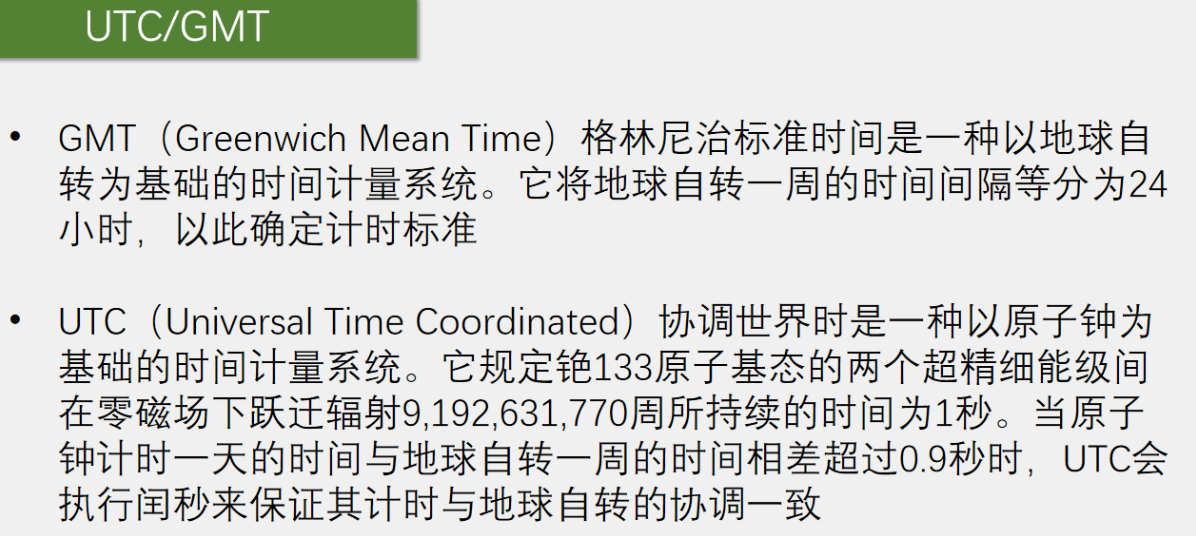
UTC(協調世界時)
- 定義與計時基準
- 以 原子鐘(銫 - 133 原子振蕩周期) 為計時基礎,1 秒定義為 “銫 - 133 原子基態的兩個超精細能級之間躍遷所對應的輻射的 9192631770 個周期的持續時間”,精度極高(上千萬年誤差約 1 秒)。
- 引入 閏秒機制:當原子鐘計時與地球自轉(因地球自轉變慢導致的計時偏差)相差超過 0.9 秒 時,通過在 UTC 時間中插入或刪除 1 秒(如出現
23:59:60或跳過23:59:59),消除與地球自轉的誤差,確保時間與晝夜同步(如 2023 年未添加閏秒,最近一次閏秒為 2016 年 12 月 31 日)。
- 與 GMT 的關系
- GMT(格林尼治標準時間) 是基于地球自轉的天文時間 時間長之后會出現誤差(以格林尼治天文臺為基準),而 UTC 是更嚴謹的原子時標準。
- 生活場景中可視為等同:兩者在實際應用中(如手機、電腦的時區設置)差異可忽略,例如 東八區時間 既表示為
UTC+8也表示為GMT+8,均指比 UTC/GMT 早 8 小時的時間(如北京時間)。
時間戳轉換
時間戳轉換
BKP簡介
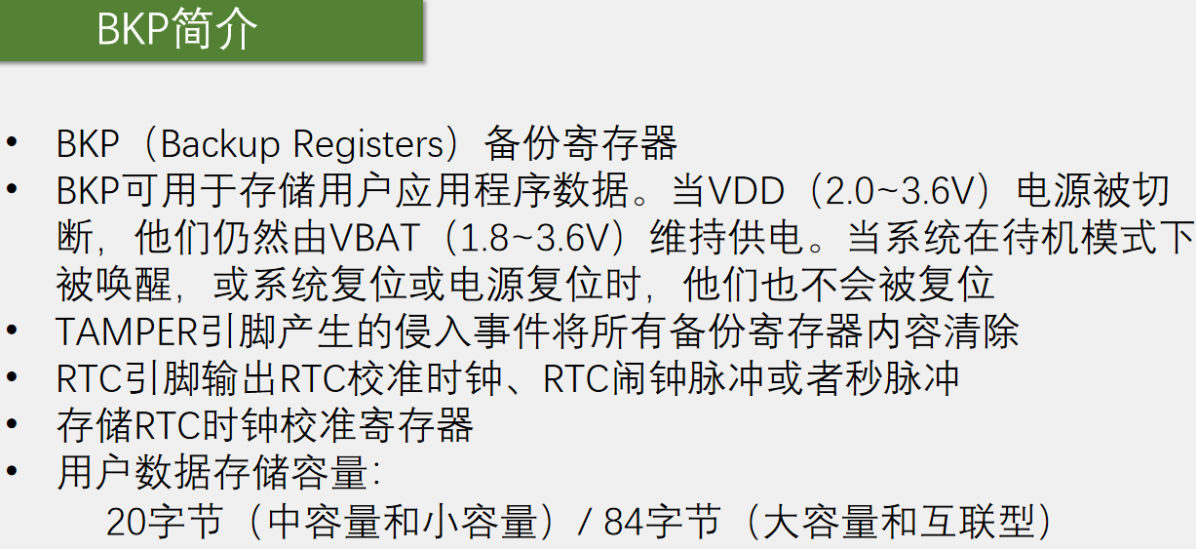
- 含義與用途 :BKP 即 backup registers,是備份寄存器,可存儲用戶自定義數據。
- 電源特性 :當 VDD 主電源切斷,由 VBAT 備用電池供電,系統喚醒、復位時數據不復位。VDD 供電電壓 2.0 - 3.6 伏,VBAT 供電電壓 1.8 - 3.6 伏。
- 引腳定義 :VDD 相關引腳為系統主電源,正常使用時接 3.3 伏電源;VBAT 為備用電池供電引腳,使用 BKP 和 RTC 需接備用電池,電池負極與主電源負極共地。若沒有外部電池,建議 VBT 引腳接到 VDD 并連接 100 納法濾波電容。
- 額外功能 :Temper 引腳侵入事件可清除備份寄存器內容,用于設備防拆(將該引腳與設備外殼相連當外殼被破壞時,會給引腳一個信號,該引腳將寄存器中數據清空);可輸出 RTC 校準時鐘、鬧鐘脈沖或秒脈沖,外部設備可測量校準時鐘校準 RTC 誤差;存儲 RTC 時鐘校準計數器,配合校準時鐘輸出功能校準 RTC。
- 存儲容量 :中容量和小容量設備里為 20 個字節,大容量和互聯型設備里為 84 個字節。
BKP基本結構
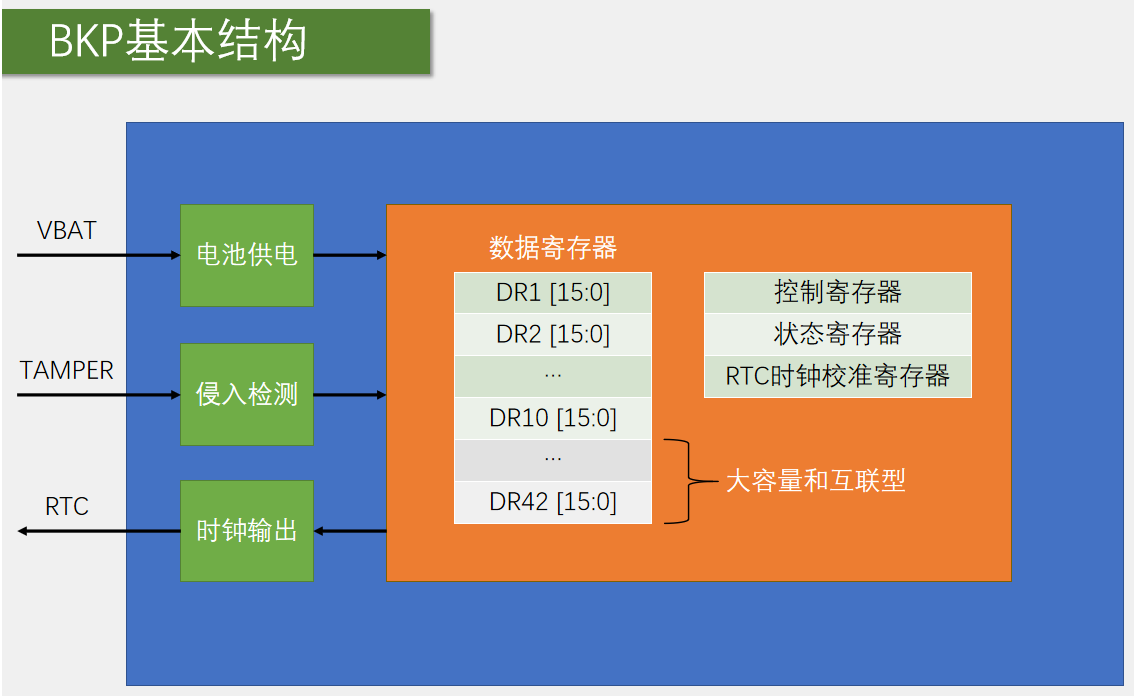
1. 電池供電模塊(VBAT 輸入)
- 電源特性:BKP 位于后備區域,VDD(2.0-3.6V)主電源掉電后,自動切換為 VBAT(1.8-3.6V)備用電池供電,確保數據不丟失(系統復位、喚醒時數據保持)。
- 電路設計:無外部電池時,VBAT 可接 VDD 并串聯 100nF 濾波電容(圖中未體現具體電路,但邏輯上支持 VBAT 與 VDD 的電源切換)。
2. 侵入檢測模塊(TAMPER 輸入)
- 防拆功能:TAMPER 引腳檢測到侵入事件(電平跳變)時,自動清除 BKP 數據寄存器內容(圖中 “侵入檢測” 模塊直接對應此功能,用于設備安全防護,如防拆鎖設計)。
3. 時鐘輸出模塊(RTC 輸出)
- 功能復用:BKP 可輸出 RTC 的校準時鐘、鬧鐘脈沖或秒脈沖(圖中 “時鐘輸出” 模塊與會議中 “BKP 額外功能” 的時鐘輸出特性一致,支持外部設備校準 RTC 誤差)。
4. 內部寄存器組
- 數據寄存器(DRx)
- 容量差異
- 中 / 小容量芯片(如 STM32F103C8T6):10 個 16 位寄存器(DR1-DR10),共 20 字節(圖中 DR1-DR10 明確標注)。
- 大容量 / 互聯型芯片:42 個 16 位寄存器(DR1-DR42),共 84 字節(圖中 “大容量和互聯型” 擴展部分,與會議內容匹配)。
- 存儲特性:寄存器數據在 VDD 掉電后由 VBAT 維持,屬于掉電保持型存儲器。
- 容量差異
- 控制 / 狀態 / 校準寄存器
- 控制寄存器:配置侵入檢測使能、時鐘輸出模式等(如 TAMPER 觸發使能)。
- 狀態寄存器:反映侵入事件狀態(如 TAMPER 觸發標志)。
- RTC 時鐘校準寄存器:存儲 RTC 校準計數器,配合時鐘輸出功能校準 RTC 計時誤差(圖中單獨列出,對應會議中 “存儲 RTC 時鐘校準計數器” 的描述)。
RTC簡介
后面將RTC框圖時,會對下面的簡介進行一一驗證。
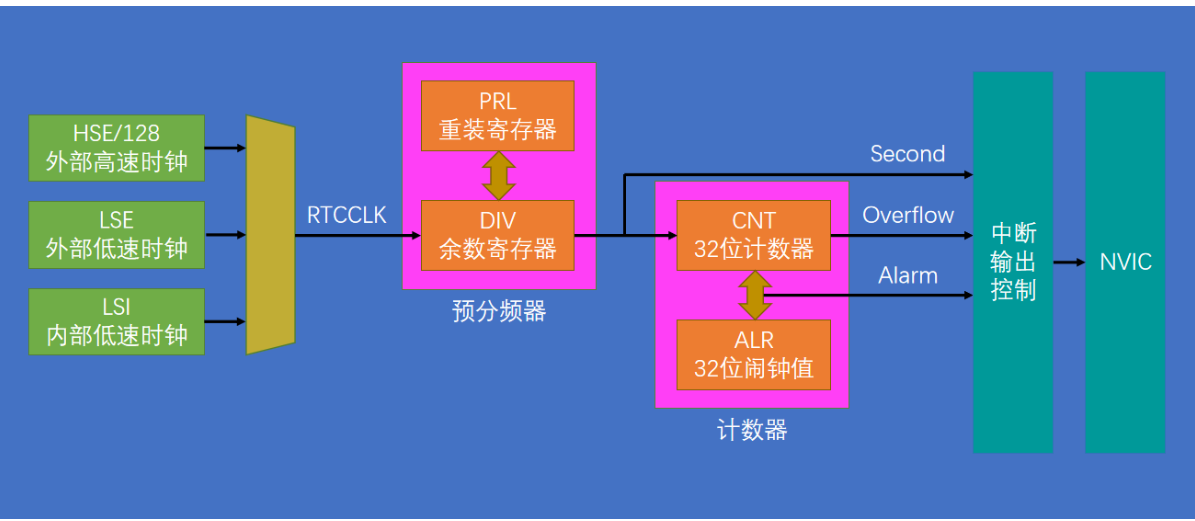
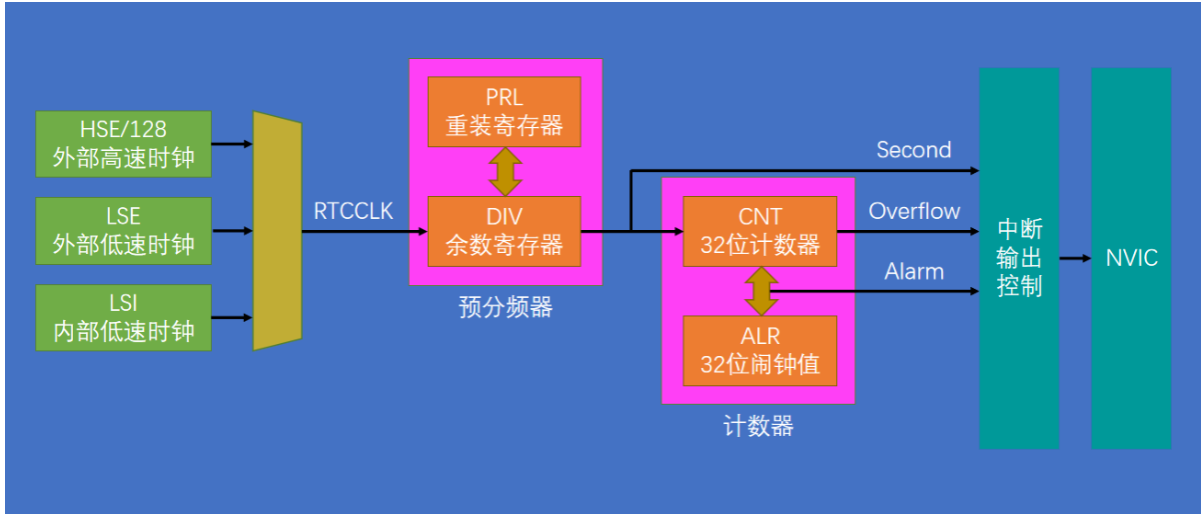
RTC時鐘源
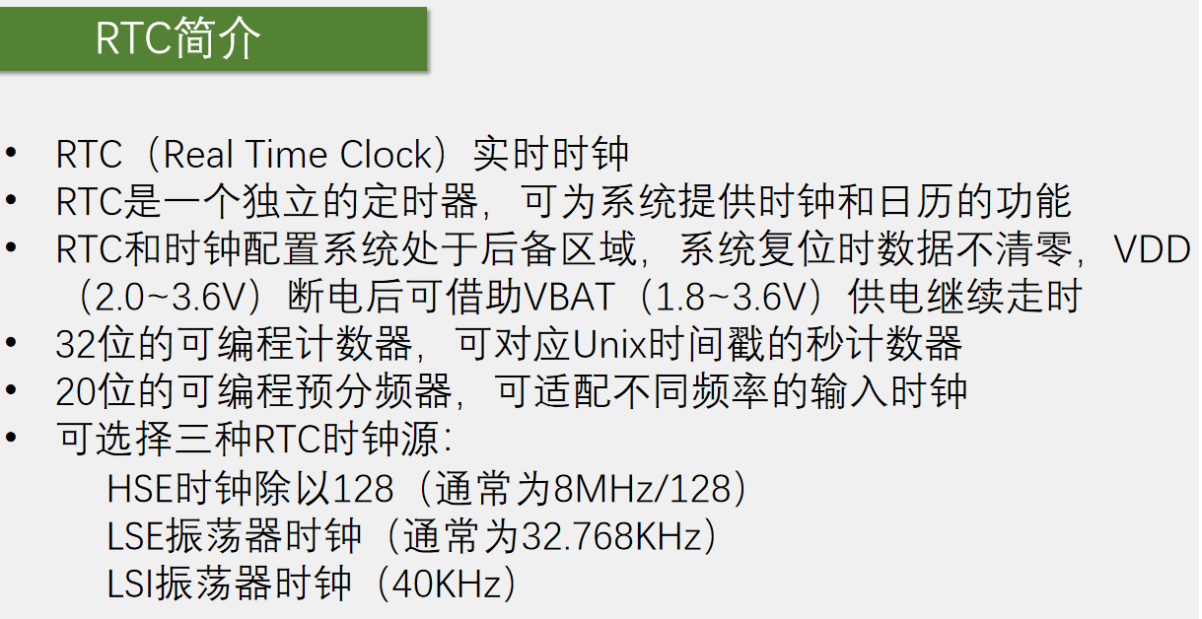
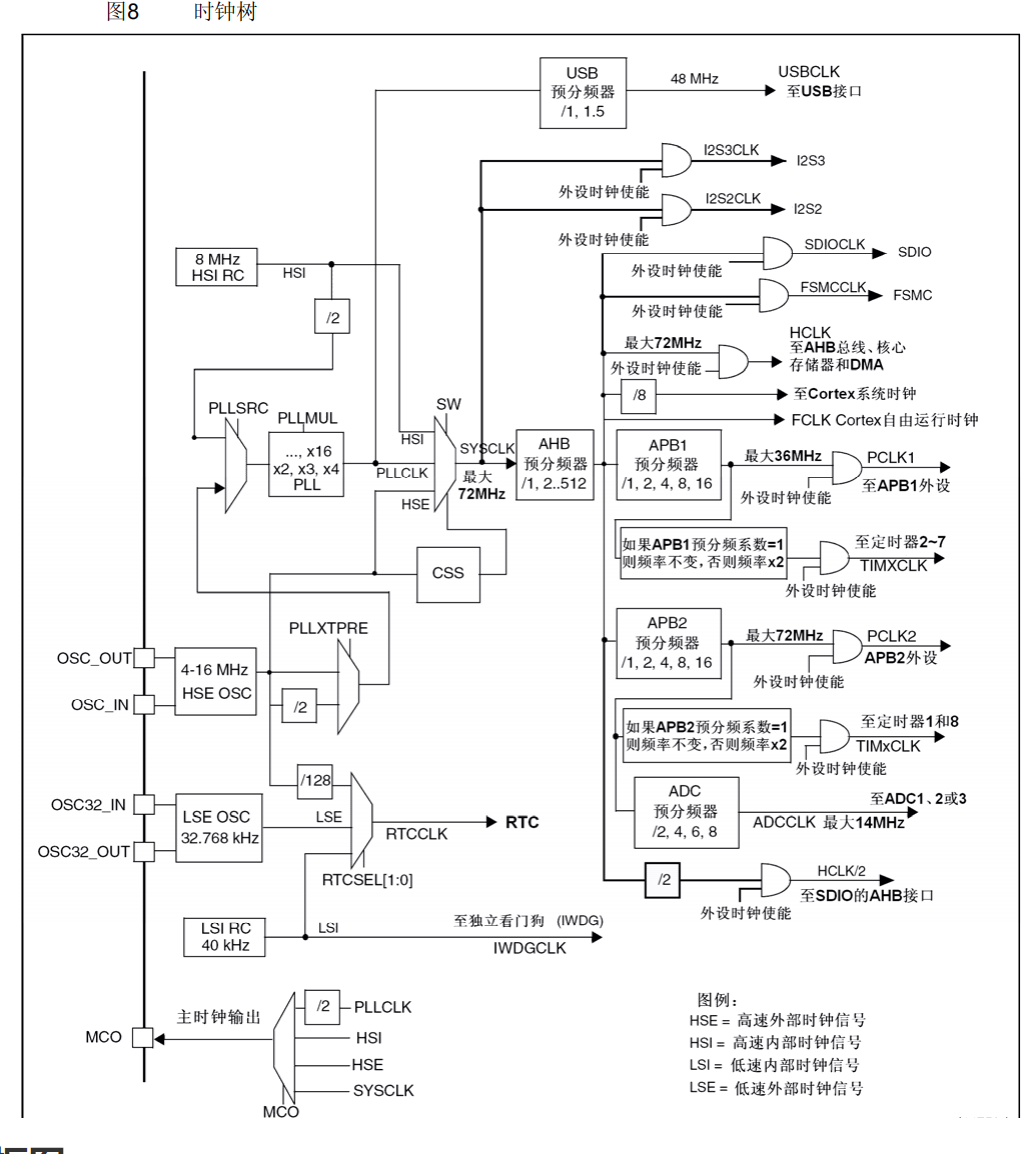
- 可以看到RTC時鐘選擇器 來 進行RTC時鐘選擇,有三種時鐘源。
- HSE 外部高速時鐘 為8Mhz,要產生1hz的頻率,要先進行128分頻之后才能進行,時鐘傳輸。因為時鐘頻率太大了。
- LSE外部低速時鐘, 可以說就是為了RTC,設計的時鐘,始終頻率為32.768KHz,是2的次方倍,后面進行時鐘分頻好操作。(一般會選擇使用)
- LSI 40Khz,也可是為RTC提供時鐘源,但是主要為看門狗外設提供時鐘源。
RTC框圖
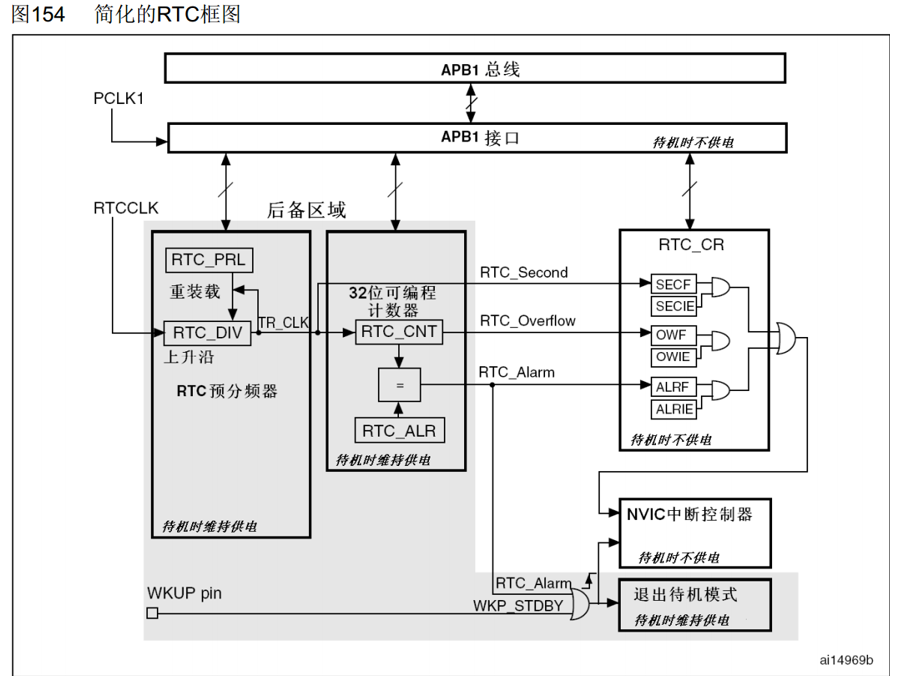
1. 硬件架構與區域劃分
- 后備區域(灰色模塊)
- 包含預分頻器(RTC_PRL/RTC_DIV)和計數計時單元(RTC_CNT/RTC_ALR),待機時由 VBAT 供電(持續計時),與 APB1 接口(待機斷電)分離,確保主電源掉電后 RTC 獨立運行(匹配會議中 “VDD 斷電后 VBAT 供電繼續走時” 的特性)。
- APB1 接口:用于軟件配置(如預分頻值、鬧鐘時間),待機時斷電(降低功耗)。
2. 預分頻器與時鐘處理
- RTCCLK 分頻:通過
RTC_PRL(重裝值)和RTC_DIV(余數計數)將輸入時鐘(如 32.768kHz LSE)分頻為1Hz(TR_CLK),驅動 32 位計數器(RTC_CNT)遞增(“20 位可編程預分頻器適配輸入時鐘”,實現秒級計時)。
3. 計數計時與中斷邏輯
- 32 位計數器(RTC_CNT):存儲 Unix 秒數,溢出周期約 2106 年(觸發
RTC_Overflow中斷, “溢出中斷” 的硬件源)。 - 鬧鐘比較(RTC_ALR):與 RTC_CNT 匹配時觸發
RTC_Alarm中斷,可以喚醒待機設備(通過WKP_STDBY邏輯, “鬧鐘喚醒設備退出待機模式”)。 - 中斷使能(RTC_CR)
SECIE(秒中斷)、OWIE(溢出中斷)、ALRIE(鬧鐘中斷)分別控制三類中斷,經 NVIC 處理( “中斷輸出使能和 NVIC 部分” 的硬件實現)。
4. 低功耗與待機特性
- 后備區域供電:預分頻器和計數計時單元在待機時持續供電(VBAT),確保計時不中斷;APB1 接口、RTC_CR、NVIC 待機時斷電。
RTC基本結構
? 預分頻器中余數寄存器是一個自減設置的,就是來一個時鐘就會計數值減一,當當減到0,會產生一個時鐘信號向后傳遞,PRl重裝值,設置周期,記滿多少次向后產生一個時鐘,當余數寄存器減到0,會將重裝寄存器中的數據重裝到自己的寄存器中,繼續計數。
硬件電路
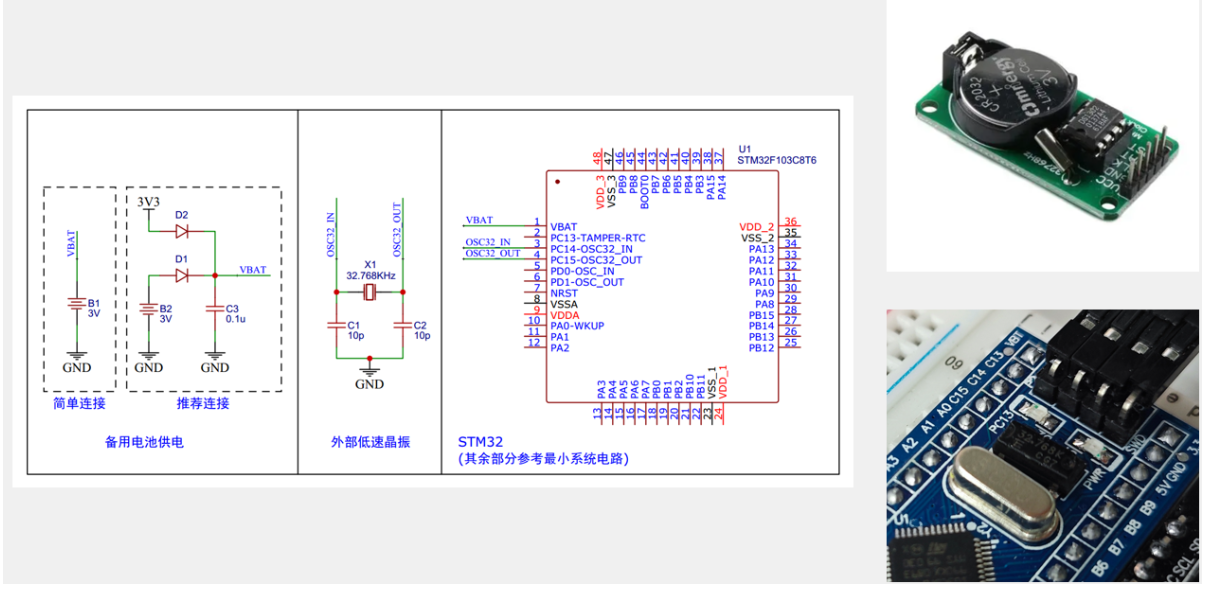
1. 備用電池供電電路
- 簡單連接:VBAT 直接接 3V 紐扣電池(如 CR2032),負極與主電源共地。
- 推薦連接:通過二極管(D1/D2)隔離主電源(VDD)與備用電池(VBAT),并聯 0.1μF 電容(C3)防電流倒灌,確保 VDD 掉電后 VBAT 獨立供電(圖中推薦電路,“防止電源倒灌,提升可靠性”)。
2. 外部低速晶振(LSE)電路
- 32.768kHz 晶振:連接 OSC32_IN(PC14)和 OSC32_OUT(PC15),兩端并聯 10pF 電容(C1/C2)到地(“LSE 為 RTC 首選時鐘源,精度高,主電源掉電后 VBAT 供電持續工作”)。
- 作用:提供 1Hz 秒脈沖(經 15 位自然分頻,32768=2^15),驅動 RTC 32 位計數器,實現高精度計時(“20 位可編程預分頻器適配輸入時鐘”,LSE 無需復雜分頻計算)。
3. 引腳功能與復用
- VBAT 引腳(PC13)
- 復用為 TAMPER(侵入檢測,觸發時清除 BKP 數據)、RTC 時鐘輸出(秒脈沖 / 鬧鐘信號)或 GPIO(“BKP 額外功能” 的硬件載體,如防拆檢測、時鐘校準輸出)。
- OSC32 引腳(PC14/PC15):專屬 RTC 時鐘輸入,連接 LSE 晶振( LSE 是 RTC 的核心時鐘源)。
4. 硬件設計規范
- 電源濾波:VBAT(0.1μF)、LSE 晶振(10pF)均需濾波電容,抑制電源噪聲。
- 二極管隔離:推薦電路中的 D1/D2(如 1N4148)確保主備電源互不影響,VBAT 在 VDD 掉電后自動接管供電。
RTC操作注意事項
后面進行代碼編寫時會著重強調。
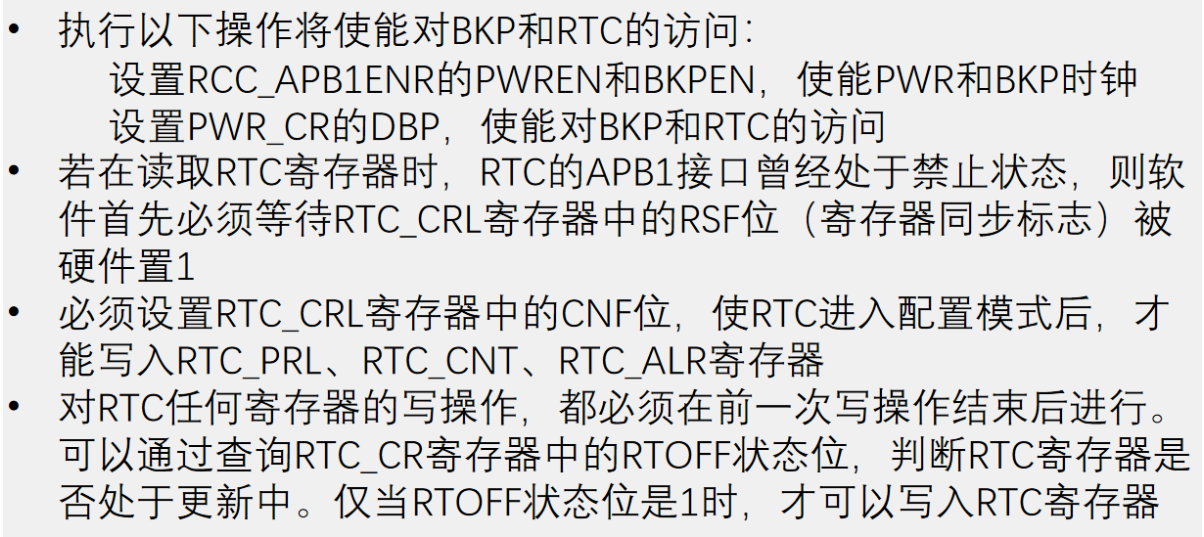
1. 使能 BKP 和 RTC 訪問(時鐘與權限)
- 硬件保護機制:
BKP 和 RTC 位于后備區域,默認受保護(防止誤操作)。使能 PWR/BKP 時鐘(PWREN/BKPEN)確保模塊供電,DBP(Disable Backup Protection)位解鎖訪問權限,避免非授權代碼篡改掉電保持數據(如 BKP 存儲的校準參數、RTC 計時狀態),保障數據完整性(尤其在主電源掉電后 VBAT 供電的敏感場景)。
2. 讀取 RTC 前等待 RSF(Registers Synchronized Flag) 同步標志
- 時鐘域異步性:
RTC(RTCCLK,如 32.768kHz)與 APB1 總線(PCLK1,高頻)異步。RSF=1 表示 RTC 寄存器(如 CNT 秒計數)已與 APB1 接口同步,確保讀取時數據最新(避免因時鐘不同步導致時間戳錯誤,如讀取到未更新的秒數),保證計時精度。
3. 寫入 RTC 前進入配置模式(CNF 位 Configuration Flag)
- 運行時保護:
RTC 正常運行時(CNF=0),計數 / 分頻 / 鬧鐘寄存器為只讀(防止運行中誤寫,如秒計數器遞增時寫入導致計時混亂)。進入配置模式(CNF=1)后,RTC 暫停計時邏輯(“凍結” 時鐘),確保寫入操作(如設置初始時間、鬧鐘)的原子性,避免中間狀態錯誤(如預分頻值半寫入導致頻率偏差)。
4. 寫操作等待 RTOFF(RTC Register Transfer Ongoing Flag) 位(前次寫結束)
- 寄存器更新時序:
RTC 寄存器屬于 RTCCLK 域,寫入后需時間同步到硬件(如預分頻器重裝)。RTOFF=1 表示前次寫操作完成(值已生效),避免流水線寫操作的競態條件(如連續寫 CNT 和 ALR 時,確保 CNT 先更新,ALR 基于新值比較),保證配置與計時邏輯的一致性,提升系統可靠性(尤其在低功耗場景下,待機喚醒后 RTC 狀態恢復的穩定性)。
BKP 庫函數介紹
| 函數名 | 功能 | 參數 | 返回值 | 說明 |
|---|---|---|---|---|
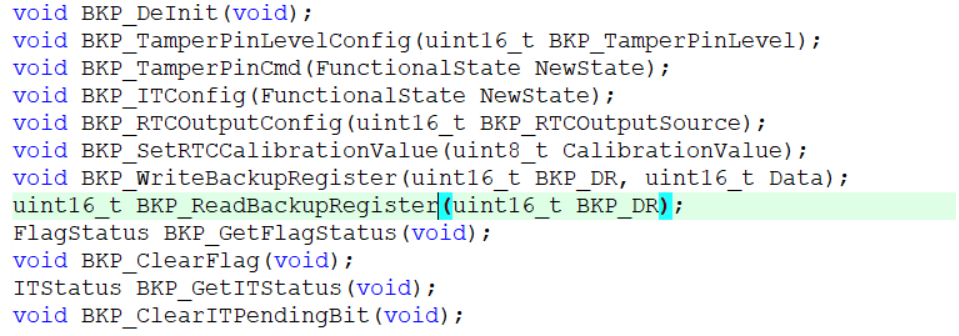
BKP_DeInit | 恢復 BKP 模塊寄存器至復位默認值 | 無 | 無 | 初始化前重置配置,確保干凈的工作狀態 |
BKP_TamperPinLevelConfig | 配置侵入檢測引腳的有效觸發電平 | uint16_t BKP_TamperPinLevel(如 BKP_TamperPinLevel_High/Low) | 無 | 設定侵入檢測(Tamper)的觸發條件(高 / 低電平) |
BKP_TamperPinCmd | 使能 / 禁止侵入檢測功能 | FunctionalState NewState(ENABLE/DISABLE) | 無 | 控制是否啟用侵入檢測(用于系統安全監測) |
BKP_ITConfig | 使能 / 禁止 BKP 模塊的中斷 | FunctionalState NewState | 無 | 開啟 / 關閉 BKP 相關中斷(如侵入檢測中斷),配合中斷處理函數使用 |
BKP_RTCOutputConfig | 配置 RTC_OUT 引腳的輸出信號源 | uint16_t BKP_RTCOutputSource(如校準時鐘、鬧鐘脈沖、秒脈沖) | 無 | 將 RTC 時鐘信號輸出到外部(如示波器、時鐘模塊),擴展 RTC 功能 |
BKP_SetRTCCalibrationValue | 設置 RTC 校準值 | uint8_t CalibrationValue(-128~+127,補償晶振誤差) | 無 | 調整 RTC 時鐘精度,補償晶振頻率偏移 |
BKP_WriteBackupRegister | 寫入備份寄存器(掉電保持) | uint16_t BKP_DR(寄存器編號,如BKP_DR1),uint16_t Data(16 位數據) | 無 | 存儲關鍵數據(如系統配置、掉電前狀態),主電源掉電后由備用電池保持 |
BKP_ReadBackupRegister | 讀取備份寄存器數據 | uint16_t BKP_DR | uint16_t(寄存器存儲的值) | 恢復掉電前保存的數據(如系統重啟后讀取配置) |
BKP_GetFlagStatus | 獲取 BKP 模塊的標志位狀態 | 無 | FlagStatus(SET/RESET) | 輪詢檢查事件(如侵入檢測是否觸發) |
BKP_ClearFlag | 清除 BKP 模塊的標志位 | 無 | 無 | 處理標志位后清除(避免重復響應,如侵入檢測標志) |
BKP_GetITStatus | 獲取 BKP 模塊的中斷狀態 | 無 | ITStatus(SET/RESET) | 檢查是否有未處理的中斷(用于中斷服務函數) |
BKP_ClearITPendingBit | 清除 BKP 模塊的中斷掛起位 | 無 | 無 | 中斷處理后清除掛起位,防止重復進入中斷 |
實時時鐘
RCC有關庫函數
| 函數名 | 功能描述 | 調用時機 | 注意事項 |
|---|---|---|---|
RCC_LSE_Configure | 配置并啟動外部低速時鐘(LSE)(如 32.768kHz 晶振)。 | 初始化 RTC 前,需手動開啟 LSE 時鐘 | LSE 默認關閉,需調用此函數啟動;啟動后需等待LSE_READY標志位為 1。 |
RCC_LSI_Command | 配置并啟動內部低速時鐘(LSI)(約 40kHz,用于備份時鐘)。 | 當 LSE 不起振時(如實驗調試場景) | 可作為 LSE 的替代時鐘源,用于應急或測試。 |
RTC_CLK_Configure | 選擇 RTC 的時鐘源(如 LSE/LSI),配置時鐘源數據選擇器。 | 啟動 LSE/LSI 后,配置 RTC 時鐘源時 | 需與RTC_CLK_Command配合使用,先配置時鐘源,再使能時鐘。 |
RTC_CLK_Command | 使能 RTC 時鐘(在配置完時鐘源后調用)。 | 配置完RTC_CLK_Configure后 | 必須調用此函數才能激活 RTC 時鐘。 |
RCC_GetFlagStatus | 獲取時鐘標志位狀態(如LSE_FLAG),判斷時鐘是否穩定啟動。 | 調用RCC_LSE_Configure后 | 需循環等待LSE_READY標志位為 1,確保 LSE 時鐘穩定工 |
RTC有關庫函數
| 函數名 | 功能描述 | 調用時機 | 注意事項 |
|---|---|---|---|
| 模式切換函數 | |||
RTC_EnterConfigMode | 進入 RTC 配置模式(置CRL寄存器的CNF位為 1)。 | 需修改 RTC 寄存器(如預分頻器、計數器)前 | 必須先進入配置模式,否則無法寫入寄存器! |
RTC_ExitConfigMode | 退出 RTC 配置模式(清CRL寄存器的CNF位為 0)。 | 完成 RTC 寄存器配置后 | 配置完成后需立即退出,避免誤操作。 |
| 數據操作函數 | |||
RTC_GetCounter | 讀取 RTC 計數器(CNT)的值,即當前時間(單位:秒)。 | 需要獲取實時時間時 | 直接返回計數器值,需自行轉換為時分秒格式。 |
RTC_SetCounter | 設置 RTC 計數器初始值(如設置初始時間)。 | 初始化 RTC 時配置初始時間 | 需先進入配置模式(調用RTC_EnterConfigMode)。 |
RTC_SetPrescaler | 配置預分頻器(PRL寄存器),設置計數器時鐘頻率(通常為 1Hz)。 | 初始化 RTC 時配置分頻系數 | 分頻值計算公式:PRL = LSE頻率/1Hz - 1(如 LSE=32768Hz 時,PRL=32767)。 |
RTC_SetAlarm | 設置 RTC 鬧鐘值(ALR寄存器)。 | 需要配置鬧鐘功能時 | 需配合中斷配置(RTC_ITConfig)使用。 |
RTC_GetDivider | 讀取預分頻器余數寄存器(DIV),獲取亞秒級精度時間(如毫秒)。 | 需要更高時間精度時(如調試) | CNT計數間隔為 1 秒,DIV寄存器用于記錄余數,可計算更細粒度時間。 |
| 等待與同步函數 | |||
RTC_WaitForLastTask | 等待上次 RTC 寫操作完成(循環檢測RTF標志位)。 | 每次寫操作(如設置計數器、預分頻器)后 | 防止寄存器操作未完成時進行下一次寫操作,避免數據錯誤! |
RTC_WaitForSynchro | 等待 RTC 時鐘同步完成(循環檢測RSF標志位)。 | 配置時鐘源或初始化 RTC 時 | 確保 RTC 時鐘與時鐘源同步,避免計時誤差。 |
| 中斷與標志位函數 | |||
RTC_ITConfig | 配置 RTC 中斷(如鬧鐘中斷、溢出中斷)。 | 需要啟用中斷功能時 | 需結合中斷控制器(NVIC)配置。 |
[其他標志位函數] | (如檢查同步狀態、中斷標志等,會議未詳細列出,需結合具體寄存器操作) | 狀態監控或錯誤處理時 | 需參考官方庫函數文檔或寄存器定義。 |
實時時鐘代碼編寫步驟
配置時鐘源 -》選擇時鐘源信號 -》配置預分頻器參數 -》配置計數器等
- 開啟 LSE 時鐘 :調用 RCC 里的 LSE config 函數,參數用 RCC LSE on 啟動外部 LSE 晶振,通過 while 循環調用 RCC get flag status 函數等待 LSE ready 標志位(等待時鐘開啟完成)。
- 選擇時鐘源 :調用 RCC RTC c LK config 函數,選擇 RCC RTCCLK source LSE,再調用 RCC RTC CRK command 函數使能時鐘。
- 等待操作 :調用等待同步和等待上一次寫入操作完成的函數,防止時鐘不同步造成 bug。
- 配置預分頻器 :調用 RTC set prescaler 函數,分頻系數為 32768 - 1,寫入后調用 RTC 等待函數確保操作完成,庫函數自帶進入和退出配置模式代碼。
- 設置初始時間 :調用 RTC set counter 函數,使用 PPT 里 2023 年 1 月 1 日的秒數設定初始時間,寫入后調用等待函數。
RTC相關代碼
// MyRTC.c #include "stm32f10x.h" // Device header
#include <time.h>
//創建一個數組,將要寫入的時間存儲到數組中,這里設置的為0時區時間
uint16_t Time[] = {2013, 1, 1, 15, 59, 55};
void MyRTC_SetTime(void);//會出現復位 重新初始化的問題 只要BKP沒有掉電就不用初始化
void RTC_Init(void)
{//使能部分代碼,開啟時鐘 PWR 和 BKPRCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR, ENABLE);RCC_APB1PeriphClockCmd(RCC_APB1Periph_BKP, ENABLE);//pwr 使能對bkp 和 rtc的數據訪問PWR_BackupAccessCmd(ENABLE);if(BKP_ReadBackupRegister(BKP_DR1) != 0xAAaa){//使用lse 時鐘源 配置RCC_LSEConfig(RCC_LSE_ON);//開啟時鐘要等待開啟完成 轉化完成會置標志位while(RCC_GetFlagStatus(RCC_FLAG_LSERDY) != SET);//選擇時鐘源RCC_RTCCLKConfig(RCC_RTCCLKSource_LSE);//開啟RTC時鐘開關RCC_RTCCLKCmd(ENABLE);//下面對RTC進行操作//等待時鐘同步RTC_WaitForSynchro();//每一次進行寫操作時,要進行判斷上一個字節是否寫入完成RTC_WaitForLastTask();//設置分頻器數據//分頻后的頻率 = 時鐘源頻率 / (預分頻系數)RTC_SetPrescaler(32768 - 1);//等待數據寫入完成RTC_WaitForLastTask();//設置計數值 這里是初始化所以就是初始值MyRTC_SetTime();//等待數據寫入完成RTC_WaitForLastTask();BKP_WriteBackupRegister(BKP_DR1, 0xAAaa);}else{//使用lse 時鐘源 配置RCC_LSEConfig(RCC_LSE_ON);//開啟時鐘要等待開啟完成 轉化完成會置標志位while(RCC_GetFlagStatus(RCC_FLAG_LSERDY) != SET);//選擇時鐘源RCC_RTCCLKConfig(RCC_RTCCLKSource_LSE);//開啟RTC時鐘開關RCC_RTCCLKCmd(ENABLE);//下面對RTC進行操作//等待時鐘同步RTC_WaitForSynchro();//每一次進行寫操作時,要進行判斷上一個字節是否寫入完成RTC_WaitForLastTask();}}//實現寫時間的函數
void MyRTC_SetTime(void)
{time_t time_cnt;struct tm time_data;//將要設置的時間寫入結構體中time_data.tm_year = Time[0] - 1900;time_data.tm_mon = Time[1] - 1;time_data.tm_mday = Time[2];time_data.tm_hour = Time[3];time_data.tm_min = Time[4];time_data.tm_sec = Time[5];//將結構體中數據轉化為時間戳time_cnt = mktime(&time_data);//將獲取的秒計數進行 計數器設置//設置計數值 這里是初始化所以就是初始值RTC_SetCounter(time_cnt);//等待數據寫入完成RTC_WaitForLastTask();}//實現讀取時間函數
//讀取秒計數,將秒計數轉化為結構體將,結構體中數據按順序存儲到數組中
void MyRTC_GetData(void)
{time_t time_cnt;struct tm time_data;//將得到的0時區的時間轉化為東8區時間time_cnt = RTC_GetCounter() + 8 * 60 * 60;time_data = *localtime(&time_cnt);Time[0] = time_data.tm_year + 1900;Time[1] = time_data.tm_mon + 1;Time[2] = time_data.tm_mday;Time[3] = time_data.tm_hour;Time[4] = time_data.tm_min;Time[5] = time_data.tm_sec;
}主函數實現代碼
//main.c#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "MyRTC.h"int main(void)
{OLED_Init();RTC_Init();OLED_ShowString(1, 1, "Date:XXXX-XX-XX");OLED_ShowString(2, 1, "Time:XX:XX:XX");OLED_ShowString(3, 1, "CNT :");OLED_ShowString(4, 1, "DIV :");while(1){MyRTC_GetData(); //RTC讀取時間,最新的時間存儲到MyRTC_Time數組中OLED_ShowNum(1, 6, Time[0], 4); //顯示MyRTC_Time數組中的時間值,年OLED_ShowNum(1, 11, Time[1], 2); //月OLED_ShowNum(1, 14, Time[2], 2); //日OLED_ShowNum(2, 6, Time[3], 2); //時OLED_ShowNum(2, 9, Time[4], 2); //分OLED_ShowNum(2, 12, Time[5], 2); //秒OLED_ShowNum(3, 6, RTC_GetCounter(), 10); //顯示32位的秒計數器OLED_ShowNum(4, 6, RTC_GetDivider(), 10); //顯示余數寄存器}
}






)





)




