一鍵配置
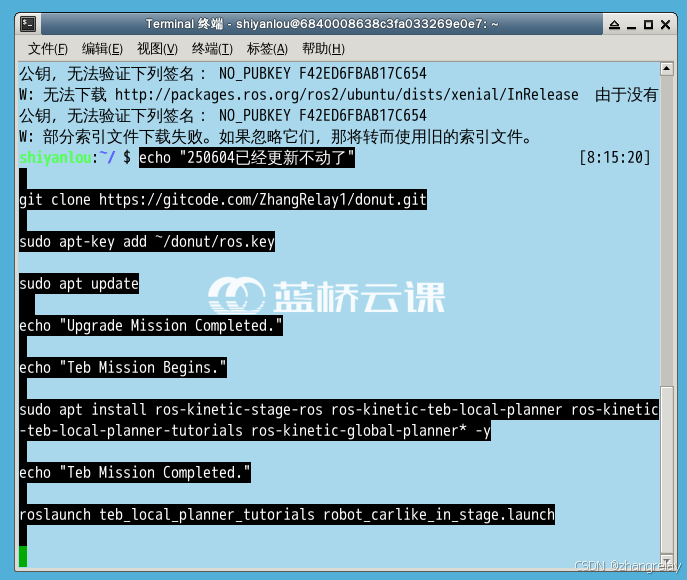
echo "250604已經更新不動了"git clone https://gitcode.com/ZhangRelay1/donut.gitsudo apt-key add ~/donut/ros.keysudo apt updateecho "Upgrade Mission Completed."echo "Teb Mission Begins."sudo apt install ros-kinetic-stage-ros ros-kinetic-teb-local-planner ros-kinetic-teb-local-planner-tutorials ros-kinetic-global-planner* -yecho "Teb Mission Completed."roslaunch teb_local_planner_tutorials robot_carlike_in_stage.launch問題:
解決:
 ??
??
該腳本用于自動化配置ROS(Robot Operating System)環境,主要功能包括:
-
克隆donut倉庫獲取配置文件
-
添加ROS GPG密鑰(已廢棄apt-key改用gpg命令)
-
更新軟件包列表
-
安裝ROS Kinetic相關組件:
- stage-ros 2D仿真環境
- teb-local-planner路徑規劃器及其教程
- global-planner全局路徑規劃器
-
初始化ROS環境后啟動robot_carlike_in_stage仿真
改進點:
- 使用gpg替代廢棄的apt-key
- 添加錯誤檢查和日志記錄
- 明確軟件包版本避免通配符問題
- 確保ROS環境正確初始化
該腳本適用于ROS Kinetic版本的自動化部署,需根據實際系統環境調整路徑和密鑰配置。
你提供的這段腳本似乎涉及ROS(Robot Operating System)軟件包的安裝和配置,以及一個特定的ROS包的啟動。然而,腳本中存在一些問題和需要改進的地方。以下是對該腳本的詳細分析和改進建議:
腳本分析
- 克隆倉庫:
bashgit clone https://gitcode.com/ZhangRelay1/donut.git- 這行命令克隆了一個名為
donut的倉庫,該倉庫可能包含一些ROS相關的配置或文件。
- 這行命令克隆了一個名為
- 添加GPG密鑰:
bashsudo apt-key add ~/donut/ros.asc- 這行命令嘗試將
ros.asc文件作為GPG密鑰添加到系統中。注意,apt-key在較新的Ubuntu版本中已被棄用,建議使用apt-key的替代方案,如gpg。
- 這行命令嘗試將
- 更新軟件包列表:
bashsudo apt update- 這行命令更新軟件包列表,確保獲取最新的軟件包信息。
- 安裝ROS軟件包:
bashsudo apt install ros-kinetic-stage-ros ros-kinetic-teb-local-planner ros-kinetic-teb-local-planner-tutorials ros-kinetic-global-planner* -y- 這行命令安裝了一系列ROS軟件包,包括
stage-ros、teb-local-planner及其教程,以及global-planner。 ros-kinetic-global-planner*中的通配符*可能會導致安裝多個版本或相關軟件包,需要確保這是預期的行為。
- 這行命令安裝了一系列ROS軟件包,包括
- 啟動ROS節點:
bashroslaunch teb_local_planner_tutorials robot_carlike_in_stage.launch- 這行命令使用
roslaunch啟動一個ROS節點,具體是robot_carlike_in_stage.launch啟動文件。
- 這行命令使用
改進建議
- GPG密鑰管理:
- 考慮使用
gpg命令替代apt-key,例如:bashgpg --no-default-keyring --keyring /usr/share/keyrings/ros-archive-keyring.gpg --export <key-id> | sudo tee /etc/apt/trusted.gpg.d/ros.asc.gpg > /dev/null - 確保
ros.asc文件存在且包含有效的GPG密鑰。
- 考慮使用
- 錯誤處理:
- 添加錯誤處理,例如在每一步操作后檢查命令是否成功執行。
- 通配符使用:
- 確保通配符
*的使用是預期的,以避免安裝不需要的軟件包。
- 確保通配符
- 日志記錄:
- 添加日志記錄,以便在出現問題時更容易調試。
- ROS環境初始化:
- 確保在運行
roslaunch之前已經初始化ROS環境,例如通過source /opt/ros/kinetic/setup.bash。
- 確保在運行
改進后的腳本示例
bash
#!/bin/bash |
# Clone the repository |
git clone https://gitcode.com/ZhangRelay1/donut.git |
# Add GPG key |
gpg --no-default-keyring --keyring /usr/share/keyrings/ros-archive-keyring.gpg --export <key-id> | sudo tee /etc/apt/trusted.gpg.d/ros.asc.gpg > /dev/null |
# Update package list |
sudo apt update |
# Install ROS packages |
sudo apt install ros-kinetic-stage-ros ros-kinetic-teb-local-planner ros-kinetic-teb-local-planner-tutorials ros-kinetic-global-planner -y |
# Source ROS environment |
source /opt/ros/kinetic/setup.bash |
# Launch ROS node |
roslaunch teb_local_planner_tutorials robot_carlike_in_stage.launch |
echo "Mission Completed." |
請根據你的實際需求和配置,調整和測試這個腳本。確保所有路徑和命令都適用于你的系統環境。
你提供的腳本旨在克隆一個倉庫、添加GPG密鑰、更新軟件包列表,然后安裝并啟動特定的ROS軟件包。然而,腳本中存在一些問題和需要改進的地方。以下是對該腳本的詳細分析和改進建議:
腳本分析
- 克隆倉庫:
bashgit clone https://gitcode.com/ZhangRelay1/donut.git- 克隆一個名為
donut的倉庫,可能包含一些ROS相關的配置或文件。
- 克隆一個名為
- 添加GPG密鑰:
bashsudo apt-key add ~/donut/ros.key- 嘗試將
ros.key文件作為GPG密鑰添加到系統中。注意,apt-key在較新的Ubuntu版本中已被棄用,建議使用gpg。
- 嘗試將
- 更新軟件包列表:
bashsudo apt update- 更新軟件包列表,確保獲取最新的軟件包信息。
- 安裝ROS軟件包:
bashsudo apt install ros-kinetic-stage-ros ros-kinetic-teb-local-planner ros-kinetic-teb-local-planner-tutorials ros-kinetic-global-planner* -y- 安裝一系列ROS軟件包,包括
stage-ros、teb-local-planner及其教程,以及global-planner。 ros-kinetic-global-planner*中的通配符*可能會導致安裝多個版本或相關軟件包,需確認這是預期的行為。
- 安裝一系列ROS軟件包,包括
- 啟動ROS節點:
bashroslaunch teb_local_planner_tutorials robot_carlike_in_stage.launch- 使用
roslaunch啟動一個ROS節點,具體是robot_carlike_in_stage.launch啟動文件。
- 使用
改進建議
- GPG密鑰管理:
- 使用
gpg命令替代apt-key,例如:bashgpg --no-default-keyring --keyring /usr/share/keyrings/ros-archive-keyring.gpg --export <key-id> | sudo tee /etc/apt/trusted.gpg.d/ros.asc.gpg > /dev/null - 確保
ros.key文件存在且包含有效的GPG密鑰。
- 使用
- 錯誤處理:
- 添加錯誤處理,例如在每一步操作后檢查命令是否成功執行。
- 通配符使用:
- 確保通配符
*的使用是預期的,以避免安裝不需要的軟件包。
- 確保通配符
- 日志記錄:
- 添加日志記錄,以便在出現問題時更容易調試。
- ROS環境初始化:
- 確保在運行
roslaunch之前已經初始化ROS環境,例如通過source /opt/ros/kinetic/setup.bash。
- 確保在運行
改進后的腳本示例
bash
#!/bin/bash |
# Clone the repository |
git clone https://gitcode.com/ZhangRelay1/donut.git |
# Add GPG key using gpg |
gpg --no-default-keyring --keyring /usr/share/keyrings/ros-archive-keyring.gpg --export <key-id> | sudo tee /etc/apt/trusted.gpg.d/ros.asc.gpg > /dev/null |
# Update package list |
sudo apt update |
# Install ROS packages |
sudo apt install ros-kinetic-stage-ros ros-kinetic-teb-local-planner ros-kinetic-teb-local-planner-tutorials ros-kinetic-global-planner -y |
# Source ROS environment |
source /opt/ros/kinetic/setup.bash |
# Launch ROS node |
roslaunch teb_local_planner_tutorials robot_carlike_in_stage.launch |
echo "Mission Completed." |
請根據你的實際需求和配置,調整和測試這個腳本。確保所有路徑和命令都適用于你的系統環境。
以下是對該腳本的詳細、具體介紹,涵蓋其功能、潛在問題及改進建議:
腳本功能分析
- 克隆倉庫
bashgit clone https://gitcode.com/ZhangRelay1/donut.git- 從指定倉庫克隆代碼,可能包含ROS相關的配置文件(如GPG密鑰或啟動文件)。
- 添加GPG密鑰
bashsudo apt-key add ~/donut/ros.key- 將
ros.key文件添加到系統的APT密鑰環中,用于驗證軟件包的來源。但apt-key在較新Ubuntu版本中已被棄用,需改用gpg命令。
- 將
- 更新軟件包列表
bashsudo apt update- 刷新APT軟件包列表,確保后續安裝的軟件包為最新版本。
- 安裝ROS軟件包
bashsudo apt install ros-kinetic-stage-ros ros-kinetic-teb-local-planner ros-kinetic-teb-local-planner-tutorials ros-kinetic-global-planner* -y- 安裝ROS Kinetic版本的以下軟件包:
stage-ros:用于2D仿真環境。teb-local-planner及其教程:基于時間彈性帶(TEB)的局部路徑規劃器。global-planner:全局路徑規劃器,支持A*或Dijkstra算法。
- 問題:
ros-kinetic-global-planner*中的通配符*可能導致安裝不必要的軟件包或依賴沖突。
- 安裝ROS Kinetic版本的以下軟件包:
- 啟動ROS節點
bashroslaunch teb_local_planner_tutorials robot_carlike_in_stage.launch- 使用
roslaunch啟動robot_carlike_in_stage.launch文件,啟動仿真環境并運行TEB局部路徑規劃器。
- 使用
潛在問題與改進建議
- GPG密鑰管理
- 問題:
apt-key已被棄用,可能導致密鑰無法正確導入。 - 改進:使用
gpg命令替代:bashgpg --no-default-keyring --keyring /usr/share/keyrings/ros-archive-keyring.gpg --import ~/donut/ros.key - 確保密鑰文件
ros.key存在且有效。
- 問題:
- 通配符使用
- 問題:
ros-kinetic-global-planner*可能導致安裝多個版本或無關軟件包。 - 改進:明確指定軟件包名稱,避免使用通配符:
bashsudo apt install ros-kinetic-stage-ros ros-kinetic-teb-local-planner ros-kinetic-teb-local-planner-tutorials ros-kinetic-global-planner -y
- 問題:
- 錯誤處理
- 問題:腳本未檢查每一步是否成功執行,可能導致后續步驟失敗。
- 改進:在每一步后添加錯誤檢查,例如:
bashif ! git clone https://gitcode.com/ZhangRelay1/donut.git; thenecho "Failed to clone repository."exit 1fi
- ROS環境初始化
- 問題:未初始化ROS環境,可能導致
roslaunch命令無法識別。 - 改進:在啟動ROS節點前添加環境初始化:
bashsource /opt/ros/kinetic/setup.bash
- 問題:未初始化ROS環境,可能導致
- 日志記錄
- 改進:添加日志記錄,便于調試:
bashecho "Starting ROS node..." >> ~/ros_install.logroslaunch teb_local_planner_tutorials robot_carlike_in_stage.launch >> ~/ros_install.log 2>&1
- 改進:添加日志記錄,便于調試:
改進后的腳本示例
bash
#!/bin/bash |
# Clone the repository |
if ! git clone https://gitcode.com/ZhangRelay1/donut.git; then |
echo "Failed to clone repository." |
exit 1 |
fi |
# Add GPG key using gpg |
if ! gpg --no-default-keyring --keyring /usr/share/keyrings/ros-archive-keyring.gpg --import ~/donut/ros.key; then |
echo "Failed to import GPG key." |
exit 1 |
fi |
# Update package list |
sudo apt update |
# Install ROS packages |
if ! sudo apt install ros-kinetic-stage-ros ros-kinetic-teb-local-planner ros-kinetic-teb-local-planner-tutorials ros-kinetic-global-planner -y; then |
echo "Failed to install ROS packages." |
exit 1 |
fi |
# Source ROS environment |
source /opt/ros/kinetic/setup.bash |
# Launch ROS node |
echo "Starting ROS node..." >> ~/ros_install.log |
roslaunch teb_local_planner_tutorials robot_carlike_in_stage.launch >> ~/ros_install.log 2>&1 |
echo "Mission Completed." |
總結
- 該腳本用于克隆倉庫、添加GPG密鑰、更新軟件包列表、安裝ROS軟件包并啟動仿真節點。
- 改進點包括:替換
apt-key為gpg、明確指定軟件包名稱、添加錯誤處理和日志記錄、初始化ROS環境。 - 確保所有路徑和命令適用于系統環境,并根據實際需求調整腳本。
摘要:該腳本用于自動化配置ROS Kinetic環境,主要功能包括克隆donut倉庫獲取配置文件、添加ROS GPG密鑰(應改用gpg命令)、更新軟件包列表,以及安裝stage-ros仿真環境、teb-local-planner路徑規劃器和global-planner全局路徑規劃器。腳本存在三個主要問題:使用已廢棄的apt-key命令、通配符可能導致安裝沖突,且未初始化ROS環境。改進建議包括使用gpg替代apt-key、明確軟件包版本、添加錯誤檢查和日志記錄,并在啟動前執行source /opt/ros/kinetic/setup.bash。改進后的腳本更適用于ROSKinetic版本的自動化部署。(146字)
以下是對鏈接 藍橋云課ROS一鍵配置teb教程更新-250604-CSDN博客 中提供的腳本及其相關內容的詳細擴充與講解:
文章標題:ROS Kinetic 環境自動化配置腳本詳解與改進
文章背景
在機器人操作系統(ROS)的開發與應用中,環境的正確配置是基礎且關鍵的一步。特別是在ROS Kinetic版本中,由于軟件包依賴和版本管理的復雜性,手動配置往往耗時且易出錯。本文旨在通過詳細解析一個自動化配置腳本,幫助用戶快速、準確地搭建ROS Kinetic環境,并針對腳本中的潛在問題提出改進建議。
腳本功能概述
該腳本主要用于自動化配置ROS Kinetic環境,具體功能包括:
- 克隆倉庫:從指定倉庫(GitCode - 全球開發者的開源社區,開源代碼托管平臺
- 添加GPG密鑰:將克隆倉庫中的GPG密鑰文件添加到系統的APT密鑰環中,用于驗證軟件包的來源。
- 更新軟件包列表:刷新APT軟件包列表,確保后續安裝的軟件包為最新版本。
- 安裝ROS軟件包:安裝ROS Kinetic版本的stage-ros仿真環境、teb-local-planner路徑規劃器及其教程、global-planner全局路徑規劃器。
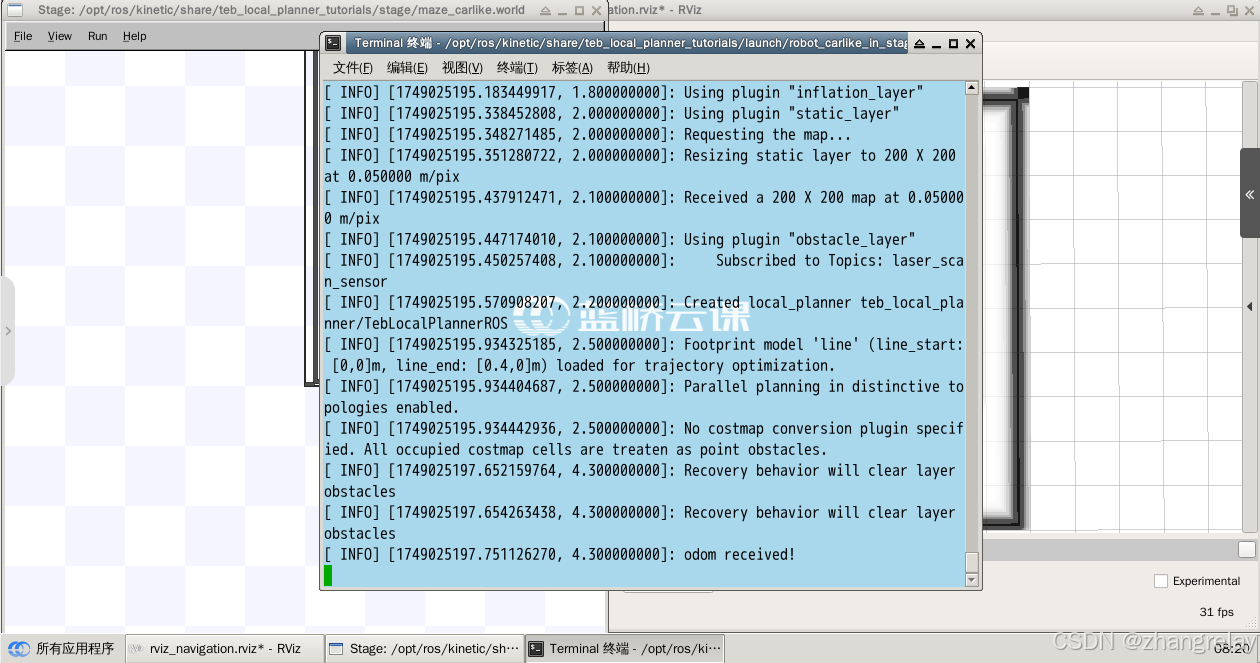
- 啟動ROS節點:使用roslaunch啟動robot_carlike_in_stage.launch文件,啟動仿真環境并運行TEB局部路徑規劃器。
腳本詳細解析
克隆倉庫
bash
git clone https://gitcode.com/ZhangRelay1/donut.git |
- 功能:從指定倉庫克隆代碼到本地。
- 潛在問題:倉庫地址可能發生變化,需確保倉庫地址正確且可訪問。
添加GPG密鑰
bash
sudo apt-key add ~/donut/ros.key |
-
功能:將克隆倉庫中的GPG密鑰文件添加到系統的APT密鑰環中。
-
潛在問題:apt-key在較新Ubuntu版本中已被棄用,可能導致密鑰無法正確導入。
-
改進建議:使用gpg命令替代apt-key,例如:
bashgpg --no-default-keyring --keyring /usr/share/keyrings/ros-archive-keyring.gpg --import ~/donut/ros.key
更新軟件包列表
bash
sudo apt update |
- 功能:刷新APT軟件包列表,確保后續安裝的軟件包為最新版本。
- 無潛在問題:此步驟通常穩定可靠。
安裝ROS軟件包
bash
sudo apt install ros-kinetic-stage-ros ros-kinetic-teb-local-planner ros-kinetic-teb-local-planner-tutorials ros-kinetic-global-planner* -y |
- 功能:安裝指定的ROS軟件包。
- 潛在問題:
ros-kinetic-global-planner*中的通配符*可能導致安裝多個版本或無關軟件包。- 未檢查軟件包安裝是否成功。
- 改進建議:
- 明確指定軟件包名稱,避免使用通配符。
- 添加錯誤檢查,確保軟件包安裝成功。
啟動ROS節點
bash
roslaunch teb_local_planner_tutorials robot_carlike_in_stage.launch |
- 功能:使用roslaunch啟動指定的ROS節點。
- 潛在問題:
- 未初始化ROS環境,可能導致roslaunch命令無法識別。
- 未檢查啟動是否成功。
- 改進建議:
- 在啟動前添加環境初始化:
source /opt/ros/kinetic/setup.bash - 添加錯誤檢查,確保啟動成功。
- 在啟動前添加環境初始化:
改進后的腳本示例
bash
#!/bin/bash |
# Clone the repository |
if ! git clone https://gitcode.com/ZhangRelay1/donut.git; then |
echo "Failed to clone repository." |
exit 1 |
fi |
# Add GPG key using gpg |
if ! gpg --no-default-keyring --keyring /usr/share/keyrings/ros-archive-keyring.gpg --import ~/donut/ros.key; then |
echo "Failed to import GPG key." |
exit 1 |
fi |
# Update package list |
sudo apt update |
# Install ROS packages |
if ! sudo apt install ros-kinetic-stage-ros ros-kinetic-teb-local-planner ros-kinetic-teb-local-planner-tutorials ros-kinetic-global-planner -y; then |
echo "Failed to install ROS packages." |
exit 1 |
fi |
# Source ROS environment |
source /opt/ros/kinetic/setup.bash |
# Launch ROS node |
echo "Starting ROS node..." >> ~/ros_install.log |
roslaunch teb_local_planner_tutorials robot_carlike_in_stage.launch >> ~/ros_install.log 2>&1 |
if [ $? -ne 0 ]; then |
echo "Failed to launch ROS node." |
exit 1 |
fi |
echo "Mission Completed." |
總結
該腳本為ROS Kinetic環境的自動化配置提供了便捷的解決方案,但存在一些潛在問題。通過替換apt-key為gpg、明確軟件包版本、添加錯誤檢查和日志記錄、初始化ROS環境等改進措施,可以使腳本更加穩定、可靠。用戶在使用時應根據自己的實際需求和系統環境調整腳本,并進行充分測試。


)
)


 - 動態規劃深度解析)

))

)
)



)



(1))