典型問題
根據系統的建模可以劃分為:
- 線性系統: x ˙ = A x + B u \mathbf{\dot{x}} = \boldsymbol{A}\mathbf{x}+\boldsymbol{B}\mathbf{u} x˙=Ax+Bu
- 非線性系統 x ˙ ( t ) = f ( x ( t ) , u ( t ) , t ) \dot{\mathbf{x}}(t) = \mathbf{f}(\mathbf{x}(t), \mathbf{u}(t), t) x˙(t)=f(x(t),u(t),t)
- 可以通過一些手段進行線性化
根據約束類型可以劃分為:
- 控制約束: u ( t ) ∈ U ? R m \mathbf{u}(t) \in \mathbb{U} \subseteq \mathbb{R}^m u(t)∈U?Rm
- 狀態約束: f ( x ) ≤ 0 \mathbf{f}(\mathbf{x}) \le 0 f(x)≤0 or g ( x ) = 0 \mathbf{g}(\mathbf{x}) = 0 g(x)=0
其實無論是線性系統/非線性系統,控制約束/狀態約束,使用最優化方法解決時都是約束,都需要使用龐特里亞金極小值原理解決
一個最優控制的典型問題形式如下:
- 被控系統(動態約束): x ˙ ( t ) = f ( x ( t ) , u ( t ) , t ) , x ( t 0 ) = x 0 \dot{\mathbf{x}}(t) = \mathbf{f}(\mathbf{x}(t), \mathbf{u}(t), t), \quad \mathbf{x}(t_0) = \mathbf{x}_0 x˙(t)=f(x(t),u(t),t),x(t0?)=x0?
- 目標函數: J = Φ [ x ( t f ) ] + ∫ t 0 t f L [ x ( t ) , u ( t ) , t ] d t J = \varPhi \left[ \boldsymbol{x}(t_f) \right] + \int_{t_0}^{t_f} L \left[ \boldsymbol{x}(t), \boldsymbol{u}(t), t \right] \mathrm{d}t J=Φ[x(tf?)]+∫t0?tf??L[x(t),u(t),t]dt
- 尋找最優控制 u ? ( t ) \mathbf{u}^*(t) u?(t) 和最優軌跡 x ? ( t ) \mathbf{x}^*(t) x?(t),使 J J J 最小化(或最大化),同時滿足狀態方程和控制約束 u ( t ) ∈ U \mathbf{u}(t) \in \mathbb{U} u(t)∈U。
- 約束條件:
- 輸入約束: u ( t ) ∈ U ? R m \mathbf{u}(t) \in \mathbb{U} \subseteq \mathbb{R}^m u(t)∈U?Rm
- 狀態約束,末尾狀態也可以設定為一個約束
典型方法
變分法
將問題理解為求代價泛函 J [ y ] J[y] J[y]極小值函數 y y y,一般用于無約束問題,如果遇見約束問題,需要構建拉格朗日函數,將原問題的約束條件 “嵌入” 到新構造的增廣代價泛函中,從而將有約束的優化問題轉化為無約束的極值問題。
變分法基礎
變分法研究泛函的極值,泛函以函數為自變量(如曲線長度、物理作用量)。通過變分 δ y ( x ) \delta y(x) δy(x),函數的微小擾動),將泛函極值轉化為微分方程求解。
- 泛函示例: J [ y ] = ∫ x 1 x 2 F ( x , y , y ′ ) d x J[y] = \int_{x_1}^{x_2} F(x, y, y') dx J[y]=∫x1?x2??F(x,y,y′)dx其中 $ y(x)$ 是函數, y ′ = d y / d x y' = dy/dx y′=dy/dx,求函數 y ? ( x ) y^*(x) y?(x)使得泛函取得最極值。
- 變分:泛函的自變量(函數)的微小變化稱為變分,記作 δ y \delta y δy,
- 變分與微分/積分滿足可交換性: δ ( d y d x ) = d d x ( δ y ) , δ ∫ L d x = ∫ δ L d x \delta\left(\frac{dy}{dx}\right)=\frac{d}{dx}(\delta y),\delta\int Ldx = \int\delta Ldx δ(dxdy?)=dxd?(δy),δ∫Ldx=∫δLdx
- 變分滿足鏈式法則, δ F = ? F ? x δ x + ? F ? y δ y + ? F ? y ˙ δ y ˙ \delta F = \frac{\partial F}{\partial x} \delta x + \frac{\partial F}{\partial y} \delta y + \frac{\partial F}{\partial \dot{y}} \delta \dot{y} δF=?x?F?δx+?y?F?δy+?y˙??F?δy˙?,其中根據變分與微分的交換律: δ y ˙ = d d x ( δ y ) \delta \dot{y} = \frac{d}{dx} (\delta y) δy˙?=dxd?(δy) ,自變量x的變分 δ x = 0 \delta x = 0 δx=0
歐拉-拉格朗日(E-L)方程
E-L 方程描述了極值曲線在函數空間中的 “駐點”,即沿任何變分方向的泛函變化率為零,類似于函數極值的一階導數為零。
E-L方程是泛函極值的必要條件,推導如下:
- 鄰近曲線:設 y ( x ) = y ( x ) + ? δ y ( x ) y(x) = y(x) + \epsilon\delta y(x) y(x)=y(x)+?δy(x), δ \delta δ就是變分,需要任意可微,為了固定邊界確保端點不變還需要滿足 δ ( x 1 ) = δ ( x 2 ) = 0 \delta(x_1)=\delta(x_2)=0 δ(x1?)=δ(x2?)=0, ? → 0 \epsilon \to 0 ?→0。
- 此時泛函可寫做: J ( y ) = ∫ x 1 x 2 F ( x , y + ? δ y , y ′ + ? δ y ′ ) d x J(y) = \int_{x_1}^{x_2} F(x, y + \epsilon \delta y, y' + \epsilon \delta y') \, dx J(y)=∫x1?x2??F(x,y+?δy,y′+?δy′)dx
- 泛函導數:對 J [ ? ] J[\epsilon] J[?] 求導并令 ? = 0 \epsilon=0 ?=0,分部積分后得: ∫ δ ( ? F ? y ? d d x ( ? F ? y ′ ) ) d x = 0 \int \delta \left( \frac{\partial F}{\partial y} - \frac{d}{dx}\left(\frac{\partial F}{\partial y'}\right) \right) dx = 0 ∫δ(?y?F??dxd?(?y′?F?))dx=0
- 推導:利用萊布尼茲法則,對 ? \epsilon ?求導保留線性部分: δ J ( ? ) = ∫ x 1 x 2 ( ? F ? ( y + ? δ y ) ? δ y + ? F ? ( y ′ + ? δ y ′ ) ? δ y ′ ) d x \delta J(\epsilon) = \int_{x_1}^{x_2} \left( \frac{\partial F}{\partial (y + \epsilon \delta y)} \cdot \delta y + \frac{\partial F}{\partial (y' + \epsilon \delta y')} \cdot \delta y' \right) dx δJ(?)=∫x1?x2??(?(y+?δy)?F??δy+?(y′+?δy′)?F??δy′)dx
- 根據變分定義,令 ? = 0 \epsilon = 0 ?=0,得到泛函在 y ( x ) y(x) y(x)處沿 η ( x ) \eta(x) η(x) 方向的變分導數: δ J = ∫ x 1 x 2 ( ? F ? y δ + ? F ? y ′ δ y ′ ) d x \delta J = \int_{x_1}^{x_2} \left( \frac{\partial F}{\partial y} \delta + \frac{\partial F}{\partial y'} \delta y' \right) dx δJ=∫x1?x2??(?y?F?δ+?y′?F?δy′)dx
- 然后取出后半部分進行分部積分以消除 δ y ′ \delta y' δy′: ∫ x 1 x 2 ? F ? y ′ δ y ′ d x = [ ? F ? y ′ δ y ] x 1 x 2 ? ∫ x 1 x 2 d d x ( ? F ? y ′ ) δ y d x \int_{x_1}^{x_2} \frac{\partial F}{\partial y'} \delta y' \, dx = \left[ \frac{\partial F}{\partial y'} \delta y \right]_{x_1}^{x_2} - \int_{x_1}^{x_2} \frac{d}{dx}\left( \frac{\partial F}{\partial y'} \right) \delta y \, dx ∫x1?x2???y′?F?δy′dx=[?y′?F?δy]x1?x2???∫x1?x2??dxd?(?y′?F?)δydx
- 由于 δ y ( x 1 ) = δ y ( x 2 ) = 0 \delta y(x_1) = \delta y(x_2) = 0 δy(x1?)=δy(x2?)=0,帶入后化簡可得: δ J = ∫ x 1 x 2 ( ? F ? y ? d d x ( ? F ? y ′ ) ) δ y d x = 0 \delta J = \int_{x_1}^{x_2} \left( \frac{\partial F}{\partial y} - \frac{d}{dx}\left( \frac{\partial F}{\partial y'} \right) \right) \delta y \, dx = 0 δJ=∫x1?x2??(?y?F??dxd?(?y′?F?))δydx=0
- 由于 δ \delta δ任意,根據變分引理則被積函數必恒為零。故 E ? L 方程 E-L方程 E?L方程: ? F ? y ? d d x ( ? F ? y ′ ) = 0 \frac{\partial F}{\partial y} - \frac{d}{dx}\left(\frac{\partial F}{\partial y'}\right) = 0 ?y?F??dxd?(?y′?F?)=0
- 變分引理:若連續函數 G ( x ) G(x) G(x)對于任意 η ∈ C 2 ( [ x 1 , x 2 ] ) \eta \in C^2([x_1,x_2]) η∈C2([x1?,x2?])滿足 ∫ G η d x = 0 \int G\eta dx = 0 ∫Gηdx=0,則 G ( x ) ≡ 0 G(x) \equiv 0 G(x)≡0
求解E-L方程就可以得到極值處的函數 y ? ( x ) y^*(x) y?(x),這個過程可以結合導數的概念來理解,,函數空間中一個點 y ( x ) y(x) y(x),臨近曲線 y ( x ) + ? δ y y(x) + \epsilon\delta y y(x)+?δy就是在這個點附近的點,且 ? → 0 \epsilon \to 0 ?→0,泛函對 ? \epsilon ?求導得到的就是 y ( x ) y(x) y(x)這個點在 δ y ( x ) \delta y(x) δy(x)這個方向的導數,滿足朝向任何方向 δ y ( x ) \delta y(x) δy(x)上的導數都為0的點自然就是極值點。最優控制的龐特里亞金原理中的哈密頓函數,本質是變分法在動態系統的擴展(含協態變量的E-L方程推廣)。
- 如果F含高階導數,則E-L方程也要擴展, ? F ? y ? d d x ( ? F ? y ′ ) + d 2 d x 2 ( ? F ? y ′ ′ ) ? ? = 0 \frac{\partial F}{\partial y}-\frac{d}{dx}\left(\frac{\partial F}{\partial y^{\prime}}\right)+\frac{d^2}{dx^2}\left(\frac{\partial F}{\partial y^{\prime\prime}}\right)-\cdots=0 ?y?F??dxd?(?y′?F?)+dx2d2?(?y′′?F?)??=0
- 如果存在約束,則需要使用拉格朗日乘子構造增廣泛函
拉格朗日函數(Lagrange Function)
拉格朗日函數(Lagrange Function)是數學優化理論中的核心工具,用于求解帶有約束條件的極值問題。它通過引入拉格朗日乘數(Lagrange Multiplier),將原問題轉化為無約束的極值問題,從而利用微積分中的求導方法求解。以下是詳細介紹:
假設我們需要優化(最大化或最小化)一個目標函數 f ( x ) f(\mathbf{x}) f(x),同時滿足若干等式約束 g i ( x ) = 0 ( i = 1 , 2 , … , m ) g_i(\mathbf{x}) = 0( i = 1, 2, \dots, m ) gi?(x)=0(i=1,2,…,m)。
拉格朗日函數的核心思想是:通過引入拉格朗日乘數 λ i \lambda_i λi?,將約束條件與目標函數“合并”為一個新的函數,使得原問題的極值可以通過求解新函數的無約束極值得到。
設目標函數為 f ( x ) f(\mathbf{x}) f(x),約束條件為 m m m 個等式約束 g i ( x ) = 0 , ( x ∈ R n ) g_i(\mathbf{x}) = 0 ,( \mathbf{x} \in \mathbb{R}^n) gi?(x)=0,(x∈Rn),且 m < n m < n m<n。
拉格朗日函數定義為:
L ( x , λ 1 , λ 2 , … , λ m ) = f ( x ) ? ∑ i = 1 m λ i g i ( x ) L(\mathbf{x}, \lambda_1, \lambda_2, \dots, \lambda_m) = f(\mathbf{x}) - \sum_{i=1}^m \lambda_i g_i(\mathbf{x}) L(x,λ1?,λ2?,…,λm?)=f(x)?i=1∑m?λi?gi?(x)
其中:
- x = ( x 1 , x 2 , … , x n ) \mathbf{x} = (x_1, x_2, \dots, x_n) x=(x1?,x2?,…,xn?)是優化變量,
- λ i \lambda_i λi?是拉格朗日乘數(可以是常數,也可以是函數,取決于優化變量,如果優化變量是一個函數,那拉格朗日乘數就也是個變量,此時的拉格朗日乘數被稱為協態,拉格朗日函數稱作動態拉格朗日函數,也叫哈密頓函數)。
- 拉格朗日函數基于對偶原理—— 將原始問題的約束轉化為對偶變量(乘子 / 協態)的優化條件,從而在增廣空間中消除顯式約束。
求解原問題的極值等價于求解拉格朗日函數 L L L的無約束極值。根據微積分理論,極值點處的梯度(各偏導數)必須為零,即:
- 對優化變量 x i x_i xi? 求偏導并令其為零:
? L ? x j = ? f ? x j ? ∑ i = 1 m λ i ? g i ? x j = 0 ( j = 1 , 2 , … , n ) \frac{\partial L}{\partial x_j} = \frac{\partial f}{\partial x_j} - \sum_{i=1}^m \lambda_i \frac{\partial g_i}{\partial x_j} = 0 \quad (j = 1, 2, \dots, n) ?xj??L?=?xj??f??i=1∑m?λi??xj??gi??=0(j=1,2,…,n) - 對拉格朗日乘數 λ i \lambda_i λi? 求偏導并令其為零(自動滿足約束條件):
? L ? λ i = ? g i ( x ) = 0 ( i = 1 , 2 , … , m ) \frac{\partial L}{\partial \lambda_i} = -g_i(\mathbf{x}) = 0 \quad (i = 1, 2, \dots, m) ?λi??L?=?gi?(x)=0(i=1,2,…,m)
這組方程(共 m + n m+n m+n個)稱為KKT條件(對等式約束情形,KKT條件退化為拉格朗日乘數法的條件),其解 ( x ? , λ ? ) (\mathbf{x}^*, \lambda^*) (x?,λ?)即為原問題的候選極值點。
若約束條件包含不等式約束 h i ( x ) ≤ 0 h_i(\mathbf{x}) \leq 0 hi?(x)≤0,則需要使用擴展的拉格朗日函數和KKT條件,此時拉格朗日函數為:
L ( x , λ , μ ) = f ( x ) ? ∑ i = 1 m λ i g i ( x ) ? ∑ j = 1 k μ j h j ( x ) L(\mathbf{x}, \lambda, \mu) = f(\mathbf{x}) - \sum_{i=1}^m \lambda_i g_i(\mathbf{x}) - \sum_{j=1}^k \mu_j h_j(\mathbf{x}) L(x,λ,μ)=f(x)?i=1∑m?λi?gi?(x)?j=1∑k?μj?hj?(x)
其中 μ j ≥ 0 \mu_j \geq 0 μj?≥0 是對應不等式約束的拉格朗日乘數,且需滿足互補松弛條件:
μ j h j ( x ) = 0 \mu_j h_j(\mathbf{x}) = 0 \quad μj?hj?(x)=0(即約束 active 時 h j = 0 h_j = 0 hj?=0,否則 μ j = 0 \mu_j = 0 μj?=0)
Pontryagin 極小值原理(龐特里亞金極小值原理)
龐特里亞金極小值原理(Pontryagin’s Minimum Principle)是最優控制理論中的核心定理之一,由蘇聯數學家列夫·龐特里亞金(Lev Pontryagin)及其團隊在20世紀50年代提出。用于求解帶有約束的動態系統最優控制問題,尤其適用于控制變量存在不等式約束(如幅值限制)的場景,是變分法的擴展和推廣,也被稱為現代變分法。它通過構造哈密頓函數,將最優控制問題轉化為一組微分方程(正則方程)的求解,并給出控制變量的最優條件。
核心推導
問題描述
代價泛函: J a = ∫ t 0 t f L ( x , u , t ) d t + Φ ( x ( t f ) ) J_a = \int_{t_0}^{t_f} L(x, u, t) dt + \Phi(x(t_f)) Ja?=∫t0?tf??L(x,u,t)dt+Φ(x(tf?))
系統約束: x ˙ = f ( x , u , t ) \mathbf{\dot{x}} = \mathbf{f}(\mathbf{x}, \mathbf{u}, t) x˙=f(x,u,t)
首末約束: x ( t 0 ) = x 0 \mathbf{x}(t_0) = \mathbf{x_0} x(t0?)=x0?
- 構造哈密頓函數(Hamiltonian)
引入協態變量(伴隨變量) λ ( t ) ∈ R n \boldsymbol{\lambda}(t) \in \mathbb{R}^n λ(t)∈Rn(與狀態變量維數相同),定義哈密頓函數: H ( x , u , λ , t ) = L ( x , u , t ) + λ T f ( x , u , t ) H(\mathbf{x}, \mathbf{u}, \boldsymbol{\lambda}, t) = L(\mathbf{x}, \mathbf{u}, t) + \boldsymbol{\lambda}^T \mathbf{f}(\mathbf{x}, \mathbf{u}, t) H(x,u,λ,t)=L(x,u,t)+λTf(x,u,t)- 協態變量 λ ( t ) \boldsymbol{\lambda}(t) λ(t) 的物理意義可理解為狀態變量的“影子價格”或“邊際代價”。
- 如果有狀態約束,還需要再加一項,變成: H ( x , u , λ , t ) = L ( x , u , t ) + λ T f ( x , u , t ) + η T ( x ? x m ) H(\mathbf{x}, \mathbf{u}, \boldsymbol{\lambda}, t) = L(\mathbf{x}, \mathbf{u}, t) + \boldsymbol{\lambda}^T \mathbf{f}(\mathbf{x}, \mathbf{u}, t)+\boldsymbol{\eta}^T(\mathbf{x}-\mathbf{x_m}) H(x,u,λ,t)=L(x,u,t)+λTf(x,u,t)+ηT(x?xm?)
- 正則方程(協態方程與狀態方程)
根據極小值原理,最優解需滿足以下正則方程:
- 狀態方程(與原系統一致): ? H ? λ = f ( x , u , t ) = x ˙ ( t ) \frac{\partial H}{\partial \boldsymbol{\lambda}} = \mathbf{f}(\mathbf{x}, \mathbf{u}, t) = \dot{\mathbf{x}}(t) ?λ?H?=f(x,u,t)=x˙(t)
- 對 λ \lambda λ求變分分析推導出來
- 協態方程(伴隨方程): ? ? H ? x = ? [ ? L ? x + ( ? f ? x ) T λ ] = λ ˙ ( t ) -\frac{\partial H}{\partial \mathbf{x}} = -\left[ \frac{\partial L}{\partial \mathbf{x}} + \left(\frac{\partial \mathbf{f}}{\partial \mathbf{x}}\right)^T \boldsymbol{\lambda} \right] = \dot{\boldsymbol{\lambda}}(t) ??x?H?=?[?x?L?+(?x?f?)Tλ]=λ˙(t)
- 根據變分和積分的交換律,代價函數的變分 δ J = ∫ t 0 t f δ L ( x , u , t ) d t = ∫ t 0 t f ( ? L ? x δ x + ? L ? u δ u ) d t \delta J = \int_{t_0}^{t_f} \delta L(x, u, t) dt = \int_{t_0}^{t_f} \left( \frac{\partial L}{\partial x} \delta x + \frac{\partial L}{\partial u} \delta u \right) dt δJ=∫t0?tf??δL(x,u,t)dt=∫t0?tf??(?x?L?δx+?u?L?δu)dt
- 構造增廣代價泛函: J a = ∫ t 0 t f [ L ( x , u , t ) + λ T ( t ) f ( x , u , t ) ] d t + Φ ( x ( t f ) ) J_a = \int_{t_0}^{t_f} \left[ L(\mathbf{x}, \mathbf{u}, t) + \lambda^T(t) \mathbf{f}(\mathbf{x}, \mathbf{u}, t) \right] dt + \Phi(\mathbf{x}(t_f)) Ja?=∫t0?tf??[L(x,u,t)+λT(t)f(x,u,t)]dt+Φ(x(tf?))
- 將其中的 λ T x ˙ \lambda^T \dot{x} λTx˙部分進行分部積分得: J a = ∫ t 0 t f [ L + λ T f + λ ˙ T x ] d t ? λ T ( t f ) x ( t f ) + λ T ( t 0 ) x ( t 0 ) + Φ ( x ( t f ) ) J_a = \int_{t_0}^{t_f} \left[ L + \boldsymbol{\lambda}^T f + \dot{\boldsymbol{\lambda}}^T x \right] dt - \boldsymbol{\lambda}^T(t_f) x(t_f) + \boldsymbol{\lambda}^T(t_0) x(t_0)+ \Phi(x(t_f)) Ja?=∫t0?tf??[L+λTf+λ˙Tx]dt?λT(tf?)x(tf?)+λT(t0?)x(t0?)+Φ(x(tf?))
- 帶入哈密頓函數得: J a = ∫ t 0 t f [ H + λ ˙ T x ] d t ? λ T ( t f ) x ( t f ) + λ T ( t 0 ) x ( t 0 ) + Φ ( x ( t f ) ) J_a = \int_{t_0}^{t_f} \left[ H + \dot{\boldsymbol{\lambda}}^T x \right] dt - \boldsymbol{\lambda}^T(t_f) x(t_f) + \boldsymbol{\lambda}^T(t_0) x(t_0)+ \Phi(x(t_f)) Ja?=∫t0?tf??[H+λ˙Tx]dt?λT(tf?)x(tf?)+λT(t0?)x(t0?)+Φ(x(tf?))
- 對增廣泛函進行變分: δ J a = ∫ t 0 t f [ ? H ? x δ x + ? H ? u δ u + λ ˙ T δ x ] d t + [ ? λ T ( t f ) δ x ( t f ) + ? Φ ? x ( t f ) δ x ( t f ) ] = 0 \delta J_a = \int_{t_0}^{t_f} \left[ \frac{\partial H}{\partial x} \delta x + \frac{\partial H}{\partial u} \delta u + \dot{\lambda}^T \delta x \right] dt + \left[ -\lambda^T(t_f) \delta x(t_f) + \frac{\partial \Phi}{\partial x(t_f)} \delta x(t_f) \right] = 0 δJa?=∫t0?tf??[?x?H?δx+?u?H?δu+λ˙Tδx]dt+[?λT(tf?)δx(tf?)+?x(tf?)?Φ?δx(tf?)]=0
- 分離變分項
- 狀態變分 δ x \delta x δx: ∫ t 0 t f ( ? H ? x + λ ˙ T ) δ x d t + [ ( ? λ T ( t f ) + ? Φ ? x ( t f ) ) δ x ( t f ) ] = 0 \int_{t_0}^{t_f} \left( \frac{\partial H}{\partial x} + \dot{\lambda}^T \right) \delta x \, dt + \left[ \left( -\lambda^T(t_f) + \frac{\partial \Phi}{\partial x(t_f)} \right) \delta x(t_f) \right] = 0 ∫t0?tf??(?x?H?+λ˙T)δxdt+[(?λT(tf?)+?x(tf?)?Φ?)δx(tf?)]=0
- 控制變分 δ u \delta u δu: ∫ t 0 t f ? H ? u δ u d t = 0 \int_{t_0}^{t_f} \frac{\partial H}{\partial u} \delta u \, dt = 0 ∫t0?tf???u?H?δudt=0
- 對任意 δ x \delta x δx ,變分 δ J a = 0 \delta J_a = 0 δJa?=0 需滿足以下條件:
- 積分項為0: ? H ? x + λ ˙ T = 0 ? λ ˙ = ? ( ? H ? x ) T \frac{\partial H}{\partial x} + \dot{\lambda}^T = 0 \quad \Rightarrow \quad \dot{\lambda} = -\left( \frac{\partial H}{\partial x} \right)^T ?x?H?+λ˙T=0?λ˙=?(?x?H?)T這就是協態方程
- 剩余項為0: ? λ ( t f ) + ? Φ ? x ( t f ) = 0 ? λ ( t f ) = ? Φ ? x ( t f ) -\lambda(t_f) + \frac{\partial \Phi}{\partial x(t_f)} = 0 \quad \Rightarrow \quad \lambda(t_f) = \frac{\partial \Phi}{\partial x(t_f)} ?λ(tf?)+?x(tf?)?Φ?=0?λ(tf?)=?x(tf?)?Φ?
- 對任意 δ u \delta u δu,變分 δ J a = 0 \delta J_a = 0 δJa?=0 需滿足以下條件:
- ? H ? u = 0 (無約束時) 或 u ? = arg ? min ? u ∈ U H (有約束時) \frac{\partial H}{\partial u} = 0 \quad \text{(無約束時)} \quad \text{或} \quad u^* = \arg \min_{u \in U} H \quad \text{(有約束時)} ?u?H?=0(無約束時)或u?=argu∈Umin?H(有約束時)即:無約束時直接求導為0,有約束時必須是最優控制曲線, u ? u^* u?為函數空間中的 “駐點”,即沿任何變分方向的泛函變化率為零。
- 終端條件
根據終端狀態是否固定,終端條件分為:- 終端狀態固定( x ( t f ) = x f \mathbf{x}(t_f) = \mathbf{x}_f x(tf?)=xf? 已知): λ ( t f ) = ? ? ? x ( t f ) \boldsymbol{\lambda}(t_f) = \frac{\partial \phi}{\partial \mathbf{x}(t_f)} λ(tf?)=?x(tf?)???
- 推導見上方協態方程部分
- 終端狀態自由:
λ ( t f ) = ? ? ? x ( t f ) , H ( t f ) = ? ? ? ? t f ( 若? t f 自由 ) \boldsymbol{\lambda}(t_f) = \frac{\partial \phi}{\partial \mathbf{x}(t_f)}, \quad H(t_f) = -\frac{\partial \phi}{\partial t_f} \quad (\text{若 } t_f \text{ 自由}) λ(tf?)=?x(tf?)???,H(tf?)=??tf????(若?tf??自由)
- 終端狀態固定( x ( t f ) = x f \mathbf{x}(t_f) = \mathbf{x}_f x(tf?)=xf? 已知): λ ( t f ) = ? ? ? x ( t f ) \boldsymbol{\lambda}(t_f) = \frac{\partial \phi}{\partial \mathbf{x}(t_f)} λ(tf?)=?x(tf?)???
- 極小值條件(核心條件)
對于所有 t ∈ [ t 0 , t f ] t \in [t_0, t_f] t∈[t0?,tf?] 和 u ( t ) ∈ U \mathbf{u}(t) \in \mathbb{U} u(t)∈U,最優控制 u ? ( t ) \mathbf{u}^*(t) u?(t) 需滿足: H ( x ? ( t ) , u ? ( t ) , λ ? ( t ) , t ) = min ? u ∈ U H ( x ? ( t ) , u , λ ? ( t ) , t ) H(\mathbf{x}^*(t), \mathbf{u}^*(t), \boldsymbol{\lambda}^*(t), t) = \min_{\mathbf{u} \in \mathbb{U}} H(\mathbf{x}^*(t), \mathbf{u}, \boldsymbol{\lambda}^*(t), t) H(x?(t),u?(t),λ?(t),t)=u∈Umin?H(x?(t),u,λ?(t),t)
即哈密頓函數在最優控制處取得極小值(若目標為最大化 J J J,則取極大值)。這一條件體現了控制約束 u ∈ U \mathbf{u} \in \mathbb{U} u∈U 的作用,當控制無約束時,可通過求導 ? H ? u = 0 \frac{\partial H}{\partial \mathbf{u}} = \mathbf{0} ?u?H?=0 直接求解。
步驟總結
- 構造哈密頓函數 H H H,包含狀態、控制、伴隨變量和時間。
- 建立正則方程:
- 解狀態方程 x ˙ = ? H ? λ \dot{\mathbf{x}} = \frac{\partial H}{\partial \boldsymbol{\lambda}} x˙=?λ?H?,
- 解協態方程 λ ˙ = ? ? H ? x \dot{\boldsymbol{\lambda}} = -\frac{\partial H}{\partial \mathbf{x}} λ˙=??x?H?。
- 確定終端條件:根據終端狀態和時間是否固定,設定 λ ( t f ) \boldsymbol{\lambda}(t_f) λ(tf?) 和 t f t_f tf? 的條件。
- 求解極小值條件:利用 H H H 對 u \mathbf{u} u 的極小化(或極大化),結合控制約束 U \mathbb{U} U,求出 u ? ( t ) \mathbf{u}^*(t) u?(t)。
- 聯立方程求解:將 u ? ( t ) \mathbf{u}^*(t) u?(t) 代入正則方程,解兩點邊值問題(BVP)得到 x ? ( t ) \mathbf{x}^*(t) x?(t) 和 λ ? ( t ) \boldsymbol{\lambda}^*(t) λ?(t)。
簡單示例:最速降線問題
以下將通過一個典型的雙積分器系統最短時間控制問題,詳細講解如何運用龐特里亞金極小值原理求解最優控制問題。我們將從問題建模、哈密頓函數構造、協態方程推導、控制律求解到最優軌跡分析逐步展開,并使用$$環境呈現公式。
問題設定:雙積分器系統的最短時間控制
考慮如下二階線性系統(雙積分器): { x ˙ 1 = x 2 , x ˙ 2 = u , \begin{cases} \dot{x}_1 = x_2, \\ \dot{x}_2 = u, \end{cases} {x˙1?=x2?,x˙2?=u,?
其中:
- x 1 ( t ) , x 2 ( t ) x_1(t), x_2(t) x1?(t),x2?(t) 為狀態變量(位置和速度),
- u ( t ) u(t) u(t) 為控制輸入,滿足幅值約束 ∣ u ( t ) ∣ ≤ 1 |u(t)| \leq 1 ∣u(t)∣≤1,
- 目標:從初始狀態 ( x 10 , x 20 ) (x_{10}, x_{20}) (x10?,x20?) 轉移到終端狀態 ( 0 , 0 ) (0, 0) (0,0),且時間最短。
系統狀態方程建模為:
[ x 1 ˙ x 2 ˙ ] = [ 0 1 0 0 ] [ x 1 x 2 ] + [ 0 1 ] u \begin{bmatrix} \dot{x_1}\\\dot{x_2} \end{bmatrix}=\begin{bmatrix}0 & 1\\0 & 0\end{bmatrix}\begin{bmatrix}x_1 \\x_2\end{bmatrix}+\begin{bmatrix}0 \\1\end{bmatrix}u [x1?˙?x2?˙??]=[00?10?][x1?x2??]+[01?]u
性能指標為:
J = min ? u ∫ 0 T 1 d t = T (最小化時間) . J = \min_u \int_0^T 1 \, dt = T \quad \text{(最小化時間)}. J=umin?∫0T?1dt=T(最小化時間).
第一步:構造哈密頓函數
根據龐特里亞金極小值原理,定義哈密頓函數 H H H 為:
H = L + λ T x ˙ = λ 1 x ˙ 1 + λ 2 x ˙ 2 + L \begin{aligned} H &= L + \boldsymbol{\lambda}^T\dot{x} \\ &= \lambda_1 \dot{x}_1 + \lambda_2 \dot{x}_2 + L \end{aligned} H?=L+λTx˙=λ1?x˙1?+λ2?x˙2?+L?
其中:
- λ 1 ( t ) , λ 2 ( t ) \lambda_1(t), \lambda_2(t) λ1?(t),λ2?(t) 為協態變量(伴隨變量),
- L L L 為性能指標的被積函數(此處 L = 1 L = 1 L=1)。
代入狀態方程 x ˙ 1 = x 2 \dot{x}_1 = x_2 x˙1?=x2? 和 x ˙ 2 = u \dot{x}_2 = u x˙2?=u,得:
H = λ 1 x 2 + λ 2 u + 1. H = \lambda_1 x_2 + \lambda_2 u + 1. H=λ1?x2?+λ2?u+1.
第二步:推導協態方程
根據PMP,協態變量的導數滿足:
λ ˙ i = ? ? H ? x i ( i = 1 , 2 ) . \dot{\lambda}_i = -\frac{\partial H}{\partial x_i} \quad (i=1,2). λ˙i?=??xi??H?(i=1,2).
計算偏導數:
- 對 x 1 x_1 x1?: ? H ? x 1 = 0 \frac{\partial H}{\partial x_1} = 0 ?x1??H?=0,故 λ ˙ 1 = 0 \dot{\lambda}_1 = 0 λ˙1?=0,即 λ 1 \lambda_1 λ1? 為常數,記為 λ 1 = c 1 \lambda_1 = c_1 λ1?=c1?;
- 對 x 2 x_2 x2?: ? H ? x 2 = λ 1 \frac{\partial H}{\partial x_2} = \lambda_1 ?x2??H?=λ1?,故 λ ˙ 2 = ? λ 1 = ? c 1 \dot{\lambda}_2 = -\lambda_1 = -c_1 λ˙2?=?λ1?=?c1?。
因此,協態變量 λ 2 ( t ) \lambda_2(t) λ2?(t) 是關于時間的線性函數:
λ 2 ( t ) = ? c 1 t + c 2 , \lambda_2(t) = -c_1 t + c_2, λ2?(t)=?c1?t+c2?,
其中 c 1 , c 2 c_1, c_2 c1?,c2? 為常數,由邊界條件確定。
第三步:利用極小值條件求解控制律
PMP要求控制輸入 u ( t ) u(t) u(t) 在每時刻 t t t 最大化哈密頓函數 H H H,即:
u ? ( t ) = arg ? min ? ∣ u ∣ ≤ 1 H = arg ? min ? ∣ u ∣ ≤ 1 ( λ 2 u + 其他 ) . u^*(t) = \arg\min_{|u| \leq 1} H = \arg\min_{|u| \leq 1} \left( \lambda_2 u + \text{其他} \right). u?(t)=arg∣u∣≤1min?H=arg∣u∣≤1min?(λ2?u+其他).
由于 λ 2 \lambda_2 λ2? 是線性函數,最大化 H H H 等價于取 u u u 與 λ 2 \lambda_2 λ2? 同號。因此:
u ? ( t ) = sign ( λ 2 ( t ) ) = { + 1 , λ 2 ( t ) < 0 , ? 1 , λ 2 ( t ) > 0. u^*(t) = \text{sign}(\lambda_2(t)) = \begin{cases} +1, & \lambda_2(t) < 0, \\ -1, & \lambda_2(t) > 0. \end{cases} u?(t)=sign(λ2?(t))={+1,?1,?λ2?(t)<0,λ2?(t)>0.?
當 λ 2 ( t ) = 0 \lambda_2(t) = 0 λ2?(t)=0 時,可能存在切換點,此時控制輸入發生翻轉。
第四步:分析協態變量與切換特性
由于 λ 2 ( t ) = ? c 1 t + c 2 \lambda_2(t) = -c_1 t + c_2 λ2?(t)=?c1?t+c2? 是線性函數,其符號最多改變一次,因此最優控制 u ? ( t ) u^*(t) u?(t) 最多切換一次,屬于Bang-Bang控制。分兩種情況討論:
- 無切換(直接Bang):若 λ 2 ( t ) \lambda_2(t) λ2?(t) 始終非負或非正,則 u ? ( t ) u^*(t) u?(t) 保持 + 1 +1 +1 或 ? 1 -1 ?1 不變;
- 一次切換(Bang-Bang):若 λ 2 ( t ) \lambda_2(t) λ2?(t) 由正變負或由負變正,則存在唯一切換時刻 τ \tau τ,使得:
u ? ( t ) = { + 1 , t < τ , ? 1 , t ≥ τ 或 { ? 1 , t < τ , + 1 , t ≥ τ . u^*(t) = \begin{cases} +1, & t < \tau, \\ -1, & t \geq \tau \end{cases} \quad \text{或} \quad \begin{cases} -1, & t < \tau, \\ +1, & t \geq \tau. \end{cases} u?(t)={+1,?1,?t<τ,t≥τ?或{?1,+1,?t<τ,t≥τ.?
第五步:利用終端條件求解常數
終端狀態固定為 ( 0 , 0 ) (0, 0) (0,0),終端時間 T T T 自由。根據PMP,終端時刻的橫截條件為: H ( T ) = 0. H(T) = 0. H(T)=0.代入 H H H 的表達式:
H ( T ) = λ 1 x 2 ( T ) + λ 2 ( T ) u ( T ) + 1 = 0. H(T) = \lambda_1 x_2(T) + \lambda_2(T) u(T) + 1 = 0. H(T)=λ1?x2?(T)+λ2?(T)u(T)+1=0.
由于 x 2 ( T ) = 0 x_2(T) = 0 x2?(T)=0(終端速度為0),化簡得:
λ 2 ( T ) u ( T ) + 1 = 0. \lambda_2(T) u(T) + 1 = 0. λ2?(T)u(T)+1=0.
又因 u ( T ) = sign ( λ 2 ( T ) ) u(T) = \text{sign}(\lambda_2(T)) u(T)=sign(λ2?(T)),故:
∣ λ 2 ( T ) ∣ = 1 ? λ 2 ( T ) = ± 1. |\lambda_2(T)| = 1 \quad \Rightarrow \quad \lambda_2(T) = \pm 1. ∣λ2?(T)∣=1?λ2?(T)=±1.
結合 λ 2 ( t ) = ? c 1 t + c 2 \lambda_2(t) = -c_1 t + c_2 λ2?(t)=?c1?t+c2?,可得:
λ 2 ( T ) = ? c 1 T + c 2 = ± 1. \lambda_2(T) = -c_1 T + c_2 = \pm 1. λ2?(T)=?c1?T+c2?=±1.
第六步:求解狀態軌跡與最優控制
以先正后負切換(+1→-1為例,假設切換時刻為 τ \tau τ,則:
- 當 t ∈ [ 0 , τ ] t \in [0, \tau] t∈[0,τ] 時, u = + 1 u = +1 u=+1,狀態方程積分得:
{ x 1 ( t ) = x 10 + x 20 t + 1 2 t 2 , x 2 ( t ) = x 20 + t . \begin{cases} x_1(t) = x_{10} + x_{20} t + \frac{1}{2} t^2, \\ x_2(t) = x_{20} + t. \end{cases} {x1?(t)=x10?+x20?t+21?t2,x2?(t)=x20?+t.? - 當 t ∈ [ τ , T ] t \in [\tau, T] t∈[τ,T] 時, u = ? 1 u = -1 u=?1,狀態方程積分得:
{ x 1 ( t ) = x 1 ( τ ) + x 2 ( τ ) ( t ? τ ) ? 1 2 ( t ? τ ) 2 , x 2 ( t ) = x 2 ( τ ) ? ( t ? τ ) . \begin{cases} x_1(t) = x_1(\tau) + x_2(\tau)(t-\tau) - \frac{1}{2}(t-\tau)^2, \\ x_2(t) = x_2(\tau) - (t-\tau). \end{cases} {x1?(t)=x1?(τ)+x2?(τ)(t?τ)?21?(t?τ)2,x2?(t)=x2?(τ)?(t?τ).?
終端條件 x 1 ( T ) = 0 , x 2 ( T ) = 0 x_1(T) = 0, x_2(T) = 0 x1?(T)=0,x2?(T)=0 給出方程組,可解出 τ \tau τ 和 T T T。
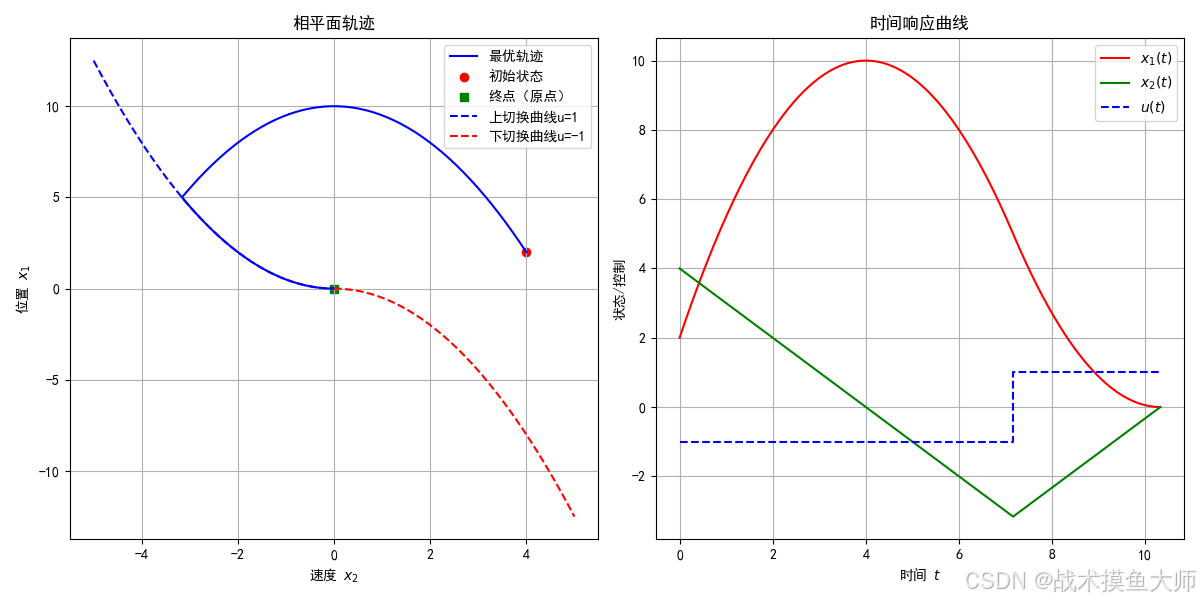
第七步:相平面分析與開關曲線
最優軌跡在相平面 ( x 1 , x 2 ) (x_1, x_2) (x1?,x2?) 上的形狀由開關曲線決定。開關曲線 Γ \Gamma Γ 分為上下兩支:
Γ = Γ + ∪ Γ ? , \Gamma = \Gamma^+ \cup \Gamma^-, Γ=Γ+∪Γ?,
其中:
- Γ + \Gamma^+ Γ+(對應 u = ? 1 u=-1 u=?1 直接到達原點): x 1 = ? 1 2 x 2 2 x_1 = -\frac{1}{2} x_2^2 x1?=?21?x22?(當 x 2 ≤ 0 x_2 \leq 0 x2?≤0),
- Γ ? \Gamma^- Γ?(對應 u = + 1 u=+1 u=+1 直接到達原點): x 1 = 1 2 x 2 2 x_1 = \frac{1}{2} x_2^2 x1?=21?x22?(當 x 2 ≥ 0 x_2 \geq 0 x2?≥0)。
若初始狀態在 Γ \Gamma Γ 上方,則最優控制為先 + 1 +1 +1 后 ? 1 -1 ?1;若在下方,則為先 ? 1 -1 ?1 后 + 1 +1 +1;若在 Γ \Gamma Γ 上,則無需切換。
具體實現代碼:
import numpy as np
import matplotlib.pyplot as pltplt.rcParams['font.sans-serif'] = ['SimHei', 'Microsoft YaHei']
plt.rcParams['axes.unicode_minus'] = Falsedef solve_min_time_control(x10, x20):"""求解雙積分器系統的最短時間控制參數(切換時間τ和總時間T)參數:x10: 初始位置x20: 初始速度返回:τ: 切換時間T: 總時間u_seq: 控制序列(分段函數)"""# 開關曲線判斷:x1 = 0.5*x22(上支)或x1 = -0.5*x22(下支)# 初始狀態在開關曲線上方時(x10 > 0.5*x202),切換策略為 -1 → +1(先制動后加速)if (x20 > 0 and x10 > -0.5 * x20**2) or (x20 < 0 and x10 > 0.5 * x20**2):# 推導方程:τ2 - 2x20τ + (0.5x202 - x10) = 0(詳細推導見說明)a = 1b = -2 * x20c = 0.5 * x20**2 - x10discriminant = b**2 - 4*a*cif discriminant < 0:raise ValueError("無實數解,初始狀態無法到達原點")τ = ( -b + np.sqrt(discriminant) ) / (2*a) # 取較大的根(保證物理意義)T = 2*τ - x20 # 由x2(T)=0推導得到# 定義分段控制律:前τ時間用-1,之后用+1def u(t):if t < τ:return -1.0else:return 1.0return τ, T, u# 初始狀態在開關曲線下方時(x10 < -0.5*x202),切換策略為 +1 → -1(先加速后制動)elif (x20 > 0 and x10 < -0.5 * x20**2) or (x20 < 0 and x10 < 0.5 * x20**2):# 推導方程:τ2 + 2x20τ + (x10 + 0.5x202) = 0a = 1b = 2 * x20c = x10 + 0.5 * x20**2discriminant = b**2 - 4*a*cif discriminant < 0:raise ValueError("無實數解,初始狀態無法到達原點")τ = (-b - np.sqrt(discriminant)) / (2*a) # 取較小的根T = 2*τ + x20 # 由x2(T)=0推導得到def u(t):if t < τ:return 1.0else:return -1.0return τ, T, u# 初始狀態在開關曲線上(無需切換)else:if x20 >= 0:# 上開關曲線(x1=0.5x22)且速度非負時,直接用-1制動T = x20 + np.sqrt(x20**2 - 2*x10) # 推導自x2(T)=0和x1(T)=0def u(t):return -1.0else:# 下開關曲線(x1=-0.5x22)且速度負時,直接用+1加速T = -x20 + np.sqrt(x20**2 + 2*x10)def u(t):return 1.0return 0, T, udef simulate_trajectory(x10, x20, τ, T, u):"""模擬狀態軌跡(分切換前后兩段積分)"""t1 = np.linspace(0, τ, 100)t2 = np.linspace(τ, T, 100)t_total = np.concatenate([t1, t2])# 切換前控制(u=-1或+1)if u(0) == -1: # 上開關曲線場景:先-1制動x1_1 = x10 + x20*t1 - 0.5*t1**2x2_1 = x20 - t1else: # 下開關曲線場景:先+1加速x1_1 = x10 + x20*t1 + 0.5*t1**2x2_1 = x20 + t1# 切換后控制(u=+1或-1)x1_τ = x1_1[-1] # 切換時刻的x1x2_τ = x2_1[-1] # 切換時刻的x2dt = t2 - τif u(τ+1e-3) == 1: # 切換后為+1x1_2 = x1_τ + x2_τ*dt + 0.5*dt**2x2_2 = x2_τ + dtelse: # 切換后為-1x1_2 = x1_τ + x2_τ*dt - 0.5*dt**2x2_2 = x2_τ - dtx1_total = np.concatenate([x1_1, x1_2])x2_total = np.concatenate([x2_1, x2_2])return t_total, x1_total, x2_totaldef visualize_results(x10, x20, τ, T, t_total, x1_total, x2_total, u):"""可視化相平面軌跡和時間響應"""plt.figure(figsize=(12, 6))# 相平面軌跡(x1 vs x2)plt.subplot(1, 2, 1)plt.plot(x2_total, x1_total, 'b-', label='最優軌跡')plt.scatter(x20, x10, c='r', marker='o', label='初始狀態')plt.scatter(0, 0, c='g', marker='s', label='終點(原點)')x2_upper = np.linspace(-5, 0, 100)x2_lower = np.linspace(0, 5, 100)x1_switch_upper = 0.5 * x2_upper**2x1_switch_lower = -0.5 * x2_lower**2plt.plot(x2_upper, x1_switch_upper, 'b--', label='上切換曲線u=1')plt.plot(x2_lower, x1_switch_lower, 'r--', label='下切換曲線u=-1')plt.xlabel('速度 $x_2$')plt.ylabel('位置 $x_1$')plt.title('相平面軌跡')plt.legend()plt.grid(True)# 時間響應(x1(t), x2(t), u(t))plt.subplot(1, 2, 2)plt.plot(t_total, x1_total, 'r-', label='$x_1(t)$')plt.plot(t_total, x2_total, 'g-', label='$x_2(t)$')u_values = [u(t) for t in t_total]plt.step(t_total, u_values, 'b--', label='$u(t)$', where='post')plt.xlabel('時間 $t$')plt.ylabel('狀態/控制')plt.title('時間響應曲線')plt.legend()plt.grid(True)plt.tight_layout()plt.show()# 主程序運行(示例初始狀態)
if __name__ == "__main__":x10, x20 = 2.0, 4.0 # 初始狀態(位置=2,速度=1)τ, T, u = solve_min_time_control(x10, x20)t_total, x1_total, x2_total = simulate_trajectory(x10, x20, τ, T, u)print(f"切換時間 τ = {τ:.2f}s,總時間 T = {T:.2f}s")visualize_results(x10, x20, τ, T, t_total, x1_total, x2_total, u)

)
















![[Python] 避免 PyPDF2 寫入 PDF 出現黑框問題:基于語言自動匹配系統字體的解決方案](http://pic.xiahunao.cn/[Python] 避免 PyPDF2 寫入 PDF 出現黑框問題:基于語言自動匹配系統字體的解決方案)