此處感謝華南虎和互聯網的眾多大佬的無償分享。
入門常識
先簡單了解以下概念:疊加性,齊次性。
用大白話講,疊加性:多個輸入對輸出有影響。齊次性:輸入放大多少倍,輸出也跟著放大多少倍
卡爾曼濾波符合這兩個特性。
卡爾曼濾波 :修正值 = 估計值 + 觀測值。符合疊加性和齊次性。
協方差的基礎知識
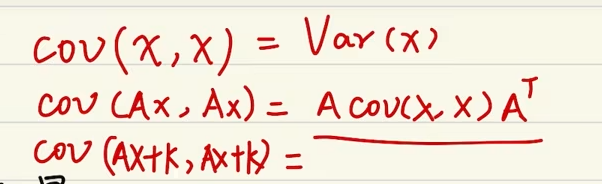
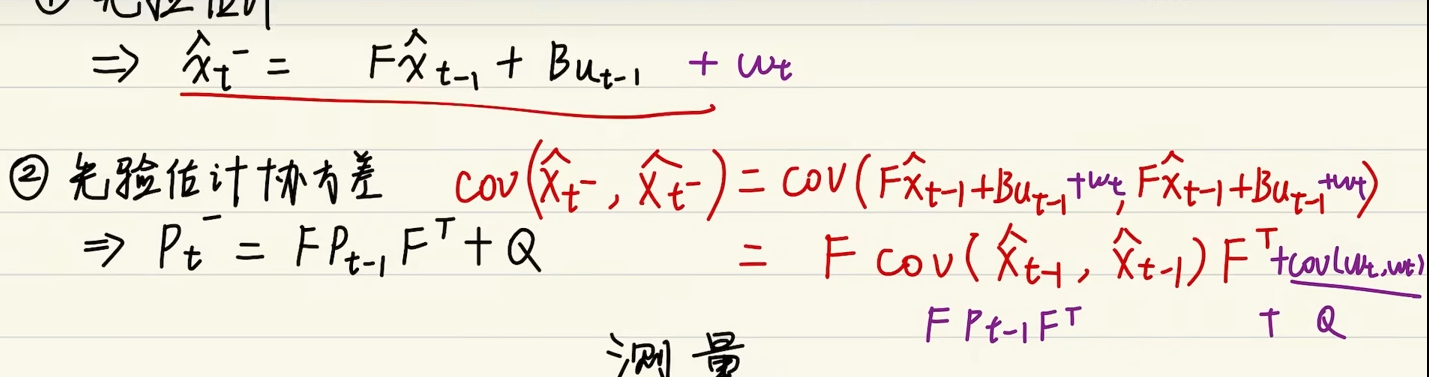
把Xt代入,然后將式子進行化簡。
公式推導
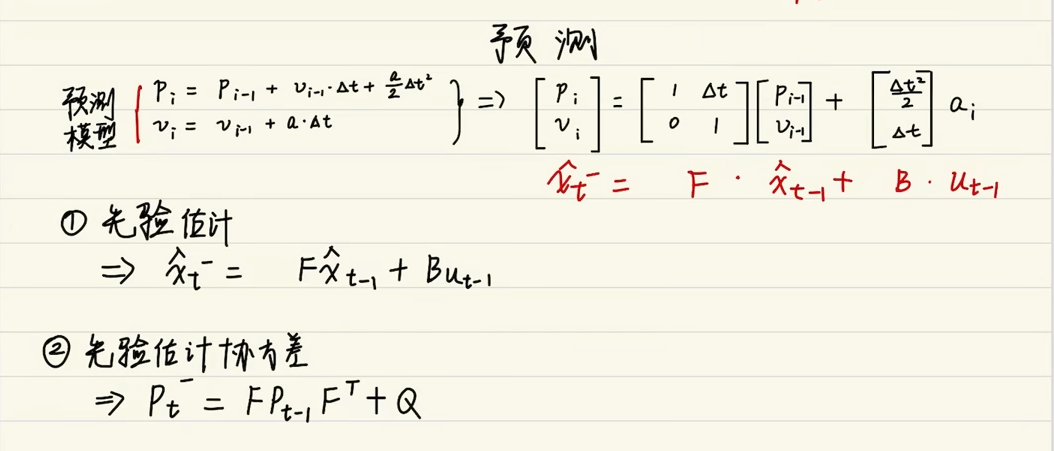
基礎公式理解
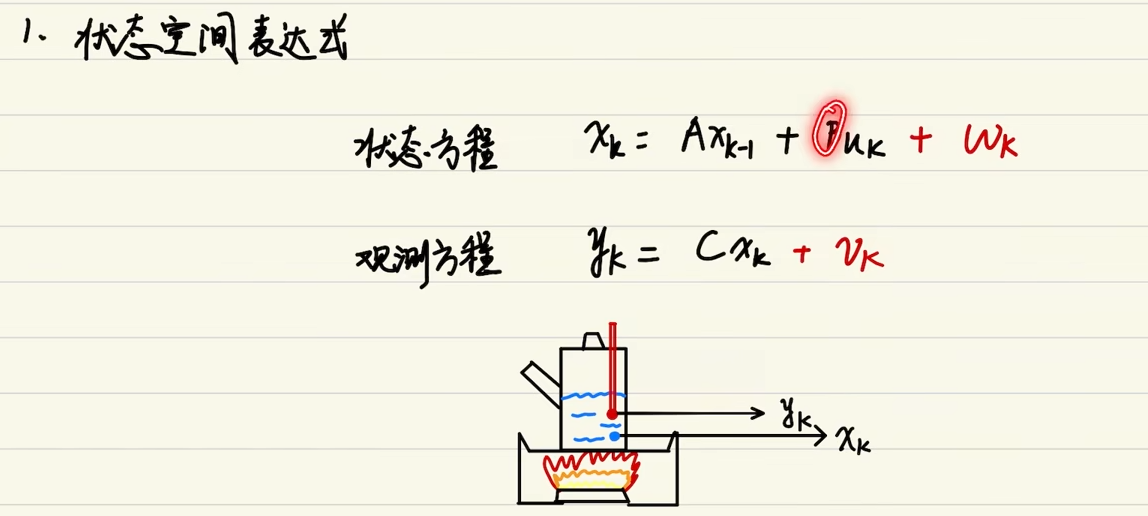
對于卡爾曼濾波,我們可以先從狀態方程和觀測方程開始理解,重點搞懂重點是狀態方程和觀測方程的實際含義。
?
狀態方程公式的參數解析。Xk:當前狀態值,Uk:輸入值, Wk:過程噪聲。A,B為系數。
觀測方程公式的參數解析。Yk:觀測值。Xk:當前狀態值。Vk:觀測噪聲
簡單理解:Vk是不可避免的儀器系統誤差,Wk是由外界因素引起的誤差。
Q:過程噪聲的方差。R:觀測噪聲的方差。
最優估計值,先驗估計值,(觀測值)后驗估計值。
卡爾曼濾波其實就是取估計值和測量值之間重合的部分。兩個概率之間重合的部分。
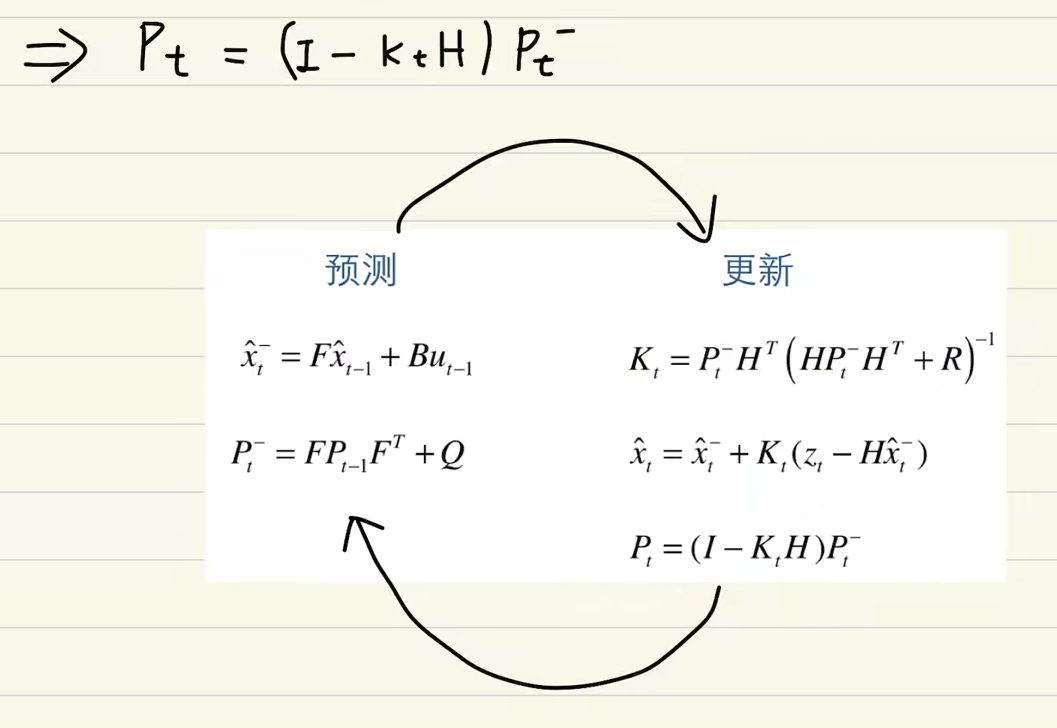
卡爾曼的實現過程
使用上一次的最優結果預測當前值,同時使用觀測值修正之前預測的當前值,得到最終結果(修正后的結果叫做最優估計)。
不需要嚴格推導,了解是什么意思,怎么用即可。
狀態更新方程
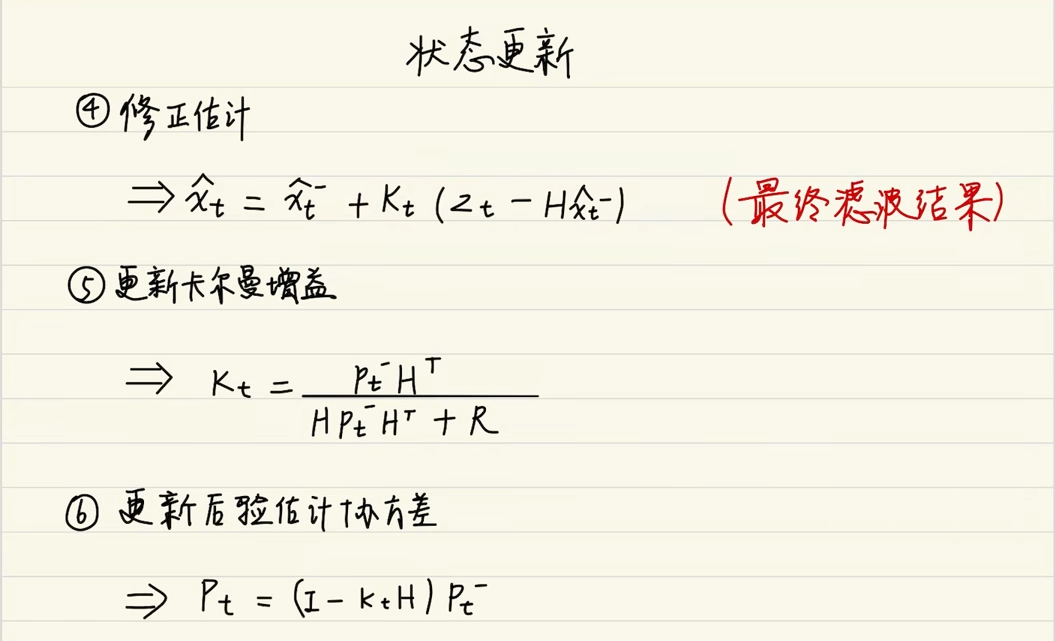
卡爾曼增益化簡后
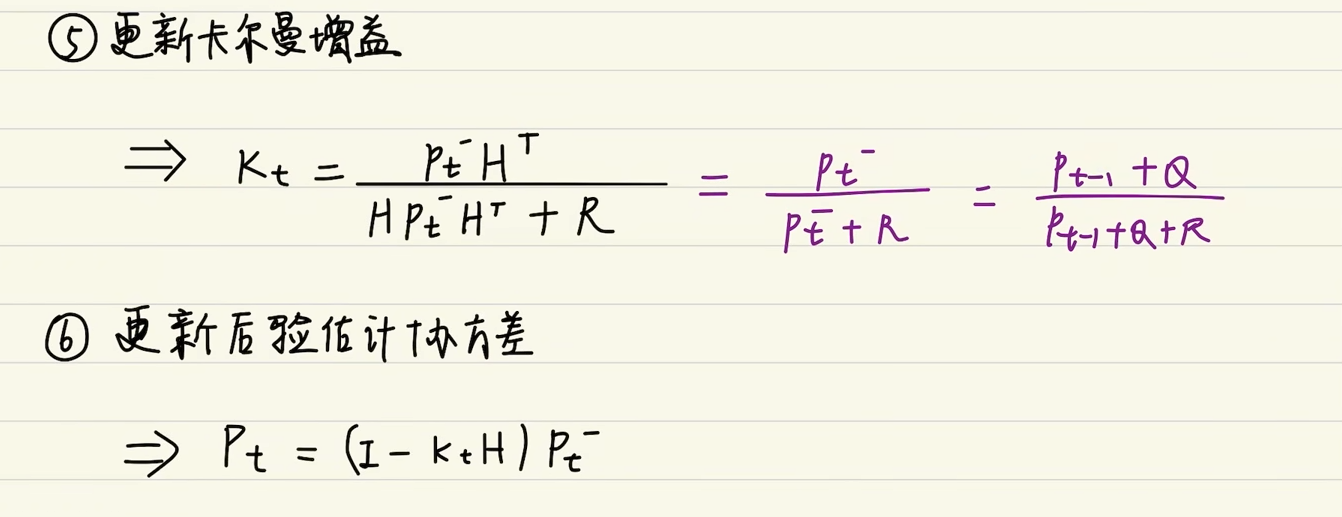
過程噪聲少,Q可以取小一點。反之,過程噪聲大,Q取大一點。
傳感器誤差小,R可以取小一點。反之,傳感器誤差大,R取大一點。
執行流程
卡爾曼濾波算法介紹
基本思想:通過不精確的測量來估測真實值。測出來的是不精確的測量值,再利用數學模型和不精確的測量來估測真實值。
一句話概括:根據系統模型和現有狀態預測下一刻的狀態,然后根據實際的測量結果進行校正。
使用場景:卡爾曼主要用來多傳感器的數據融合,單一傳感器建議用其他濾波算法。
如何使用?
以下面的代碼為例:先定義好卡爾曼濾波結構體,并為其賦值。之后把結構體參數傳入,把要過濾的數據傳入。卡爾曼濾波算法就會把過濾好的數據,放在其結構體的輸出成員中存儲好。我們再用變量把卡爾曼濾波結構體中的輸出成員的值接收到就行了。
代碼
kalman.c
/*** 一維卡爾曼濾波器實現* @param ekf 卡爾曼濾波器結構體指針,包含濾波所需參數* @param input 當前時刻的測量值* * 算法流程說明:* 1. 預測階段:根據上一時刻的狀態估計當前狀態* 2. 計算卡爾曼增益:確定測量值和預測值的權重* 3. 更新估計:結合預測值和測量值得到最優估計* 4. 更新協方差:為下一時刻的預測做準備*/
void kalman_1(struct _1_ekf_filter *ekf, float input)
{// 1. 預測協方差矩陣(時間更新)// Now_P = LastP + Q// 預測誤差 = 上一時刻誤差 + 過程噪聲// Q值越大,表明系統模型越不可靠,濾波器對新測量值更敏感ekf->Now_P = ekf->LastP + ekf->Q;// 2. 計算卡爾曼增益// Kg = Now_P / (Now_P + R)// 卡爾曼增益權衡預測值和測量值的權重// R值越大(測量噪聲大),增益越小,更信任預測值ekf->Kg = ekf->Now_P / (ekf->Now_P + ekf->R);// 3. 狀態更新方程(測量更新)// out = out + Kg * (input - out)// 本質是預測值與測量值的加權融合// 當Kg=1時完全信任測量值,當Kg=0時完全信任預測值ekf->out = ekf->out + ekf->Kg * (input - ekf->out);// 4. 更新誤差協方差矩陣// LastP = (1-Kg) * Now_P// 更新當前估計誤差,用于下一時刻的預測// 隨著迭代進行,P值會收斂到穩態ekf->LastP = (1 - ekf->Kg) * ekf->Now_P;
}kalman.h
#ifndef _KALMAN_H // 防止頭文件被重復包含
#define _KALMAN_H// 定義一維擴展卡爾曼濾波器結構體
struct _1_ekf_filter
{float LastP; // 上一時刻的協方差(預測誤差)float Now_P; // 當前時刻的協方差(估計誤差)float out; // 濾波器輸出值(最優估計值)float Kg; // 卡爾曼增益,權衡預測值和測量值的權重float Q; // 過程噪聲協方差,反映系統模型的不確定性float R; // 測量噪聲協方差,反映測量設備的不確定性
};// 一維卡爾曼濾波器函數
// 參數:ekf-卡爾曼濾波器結構體指針,input-當前時刻的測量值
extern void kalman_1(struct _1_ekf_filter *ekf, float input);#endif // _KALMAN_H調用示例
最后我們要使用的數據在結構體的.out中
for (i = 0; i < 6; i++) // 處理讀取的數據{pMpu[i] = (((int16_t)buffer[i << 1] << 8) | buffer[(i << 1) + 1]) - MpuOffset[i]; // 整合為16bit,并減去水平靜止校準值if (i < 3) // 以下對加速度做卡爾曼濾波{{static struct _1_ekf_filter ekf[3] = {{0.02, 0, 0, 0, 0.001, 0.543}, {0.02, 0, 0, 0, 0.001, 0.543}, {0.02, 0, 0, 0, 0.001, 0.543}};kalman_1(&ekf[i], (float)pMpu[i]); // 一維卡爾曼pMpu[i] = (int16_t)ekf[i].out;}}// 如果是陀螺儀數據,進行低通濾波if (i > 2) // 以下對角速度做一階低通濾波{uint8_t k = i - 3;const float factor = 0.15f; // 濾波系數static float tBuff[3]; // 濾波緩沖區pMpu[i] = tBuff[k] = tBuff[k] * (1 - factor) + pMpu[i] * factor;}}


)
機制支持 多種連接方式(ConnectionType))
代碼詳解)

)

的調用)
——添加記憶)






)

