QGroundControl作為開源無人機地面站軟件,其安卓客戶端界面美化與邏輯優化是提升用戶體驗的重要工程。 通過Qt框架的界面重構和代碼邏輯優化,可以實現視覺升級與性能提升的雙重目標。本文將系統講解QGC安卓客戶端的二次開發全流程,包括開發環境搭建、界面視覺升級、多分辨率適配以及代碼邏輯優化與性能提升方案,幫助開發者掌握這一跨平臺應用的深度定制技能。
一、QGroundControl項目背景與核心架構
QGroundControl(簡稱QGC)是一個開源的無人機地面控制站軟件,由Dronecode基金會維護,支持MAVLink協議的各類無人機。它采用Qt框架構建,實現了跨平臺功能,可運行于Windows、macOS、Linux、Android和iOS等操作系統。QGC的架構設計遵循模塊化原則,分為UI層、業務邏輯層、通信層和數據存儲層四大核心部分,各層之間通過清晰的接口進行交互,確保系統的高內聚性和低耦合性。
UI層是用戶直接交互的部分,基于Qt Quick和QML技術實現,提供動態、響應迅速的界面。業務邏輯層處理與飛行控制相關的功能,如任務管理、飛行模式切換和參數設置。通信層負責與無人機的通信,通過MAVLink協議實現數據傳輸和控制指令發送。數據存儲層管理飛行日志、用戶配置和地圖緩存等數據,提供持久化功能。
QGC采用MAVLink協議作為與無人機通信的基礎,該協議是無人機行業廣泛應用的輕量級消息協議,具有低帶寬、高可靠性和實時性等特點。其代碼結構復雜但模塊化清晰,主要功能模塊包括應用核心、飛行控制模塊、地圖與導航模塊、視頻流模塊和日志回放模塊等。這種架構設計使得QGC具備高擴展性和可維護性,開發者可以根據需求添加新的功能模塊或對現有模塊進行優化。
二、QGroundControl安卓開發環境搭建
2.0 開源無人機地面站QGroundControl流程圖:
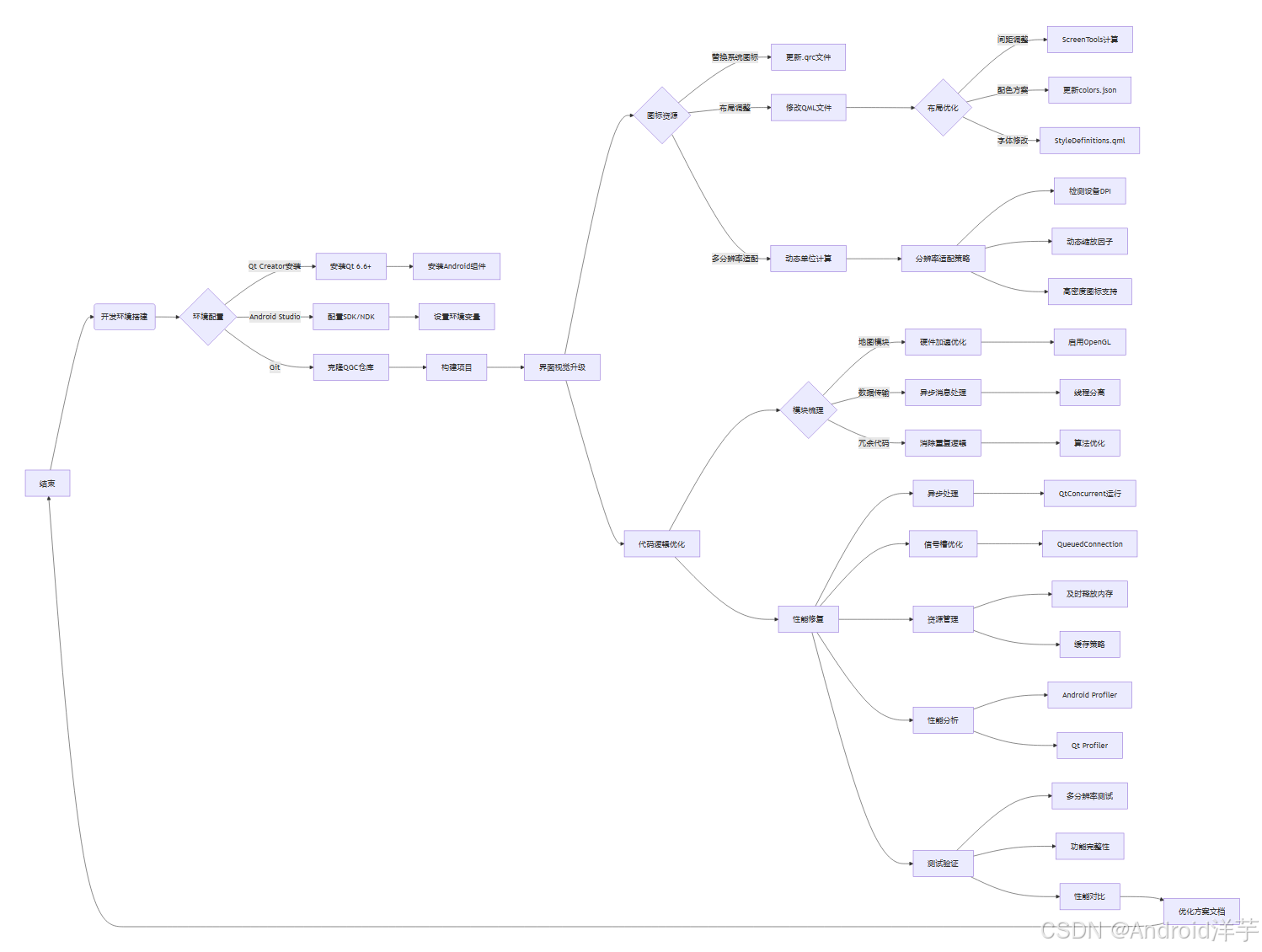
要對QGC進行二次開發,首先需要搭建合適的開發環境。QGC基于Qt框架開發,因此安卓開發環境的核心是Qt for Android的配置。以下是環境搭建的詳細步驟:
2.1 系統要求與基礎工具安裝
QGC的開發要求64位操作系統(Windows、macOS或Ubuntu),并至少8GB內存和20GB存儲空間。首先安裝必要工具:Git用于代碼管理,Java JDK(推薦1.8或11)用于Android構建,以及Android Studio作為Android開發的核心工具。在Android Studio中,需安裝Android SDK、NDK(推薦21.3+)和CMake(3.18+)。
在Ubuntu系統上,可通過以下命令安裝基礎依賴:
sudo apt-get update
sudo apt-get install git cmake g++ qtcreator qtbase5-dev qtdeclarative5-dev qtquickcontrols2-5-dev qtmultimedia5-dev qtopengl5-dev libxcb-xfixes0-dev libx11-dev libssl-dev libusb-1.0-0-dev2.2 Qt環境配置
QGC v6.x需要Qt 6.6或更高版本。從Qt官網下載Qt Online Installer,安裝時需特別選擇Android平臺組件(如Android ARMv7/ARM64),以及Qt Charts、Qt Location、Qt Quick Controls 2等附加模塊。確保安裝路徑不含中文或空格,以免導致構建失敗。
在Windows系統上,還需安裝Apache Ant和Android SDK Platform-Tools,并配置環境變量:
export ANDROID_SDK_ROOT=$HOME/Android/Sdk
export ANDROID_NDK_ROOT=$ANDROID_SDK_ROOT/ndk/21.3.6528147
export PATH=$PATH:$ANDROID_SDK_ROOT/platform-tools2.3 獲取QGC源代碼并構建
通過Git克隆QGC倉庫,并

算法)

完整講解與實戰應用)

--vue3基礎知識- 插值表達式、ref、reactive)
)


使用注意事項)


)
在win11搭建opencv4.11.1 + qt5.15.2 + vs2019_x64開發環境)

:背包dp)


)
)