引言
本報告系統梳理了2025年具身智能領域的最新進展,基于國內外權威新聞源與行業研究報告,通過數據可視化與深度分析相結合的方式,呈現該領域多維發展態勢。從技術突破層面看,多模態大模型的突破性進展為具身智能注入新動能,如Google DeepMind的RT系列視覺-語言-動作模型顯著提升機器人泛化能力[1],而OpenAI最新發布的GPT-4.5模型通過擴展無監督學習,增強了與物理世界的交互自然度[8]。產業動態方面,國內第二屆中國具身智能大會(CEAI2025)的召開標志著行業生態加速成熟,會上發布的十五大重點方向與白皮書為產業鏈協同發展提供戰略指引[2],同時國際巨頭如特斯拉Optimus在運動控制領域的迭代突破持續推高行業熱度[1]。
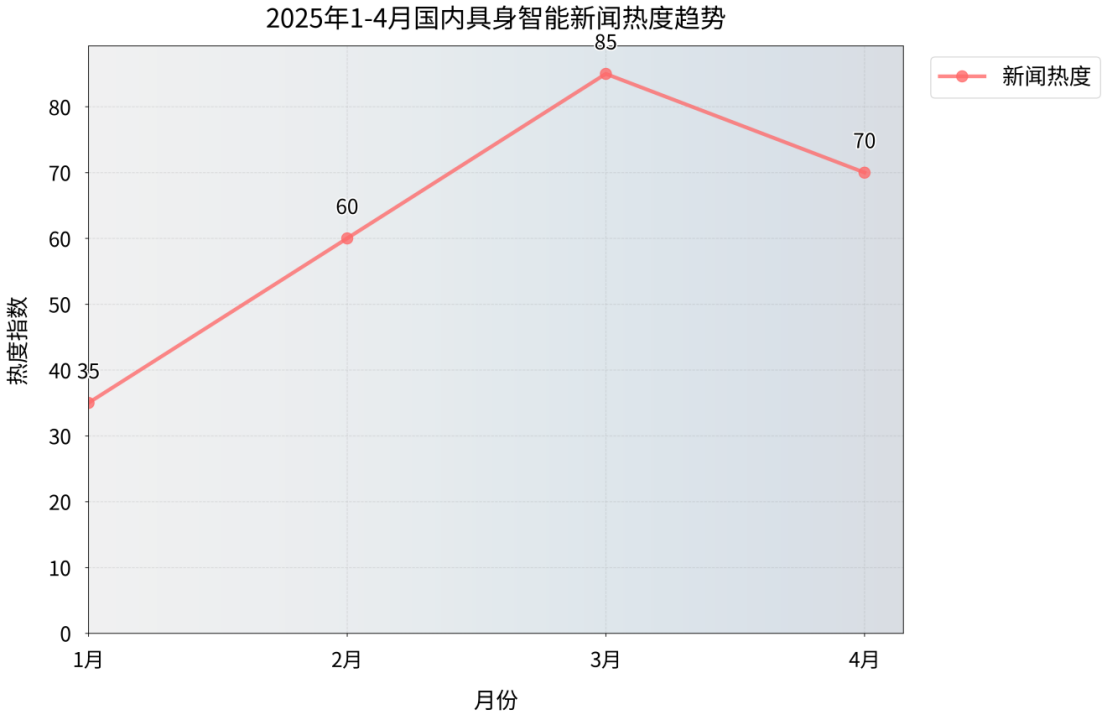
(國內具身智能新聞熱度趨勢圖顯示1-4月熱度呈階梯式上升,3月受行業大會推動達到峰值)
應用場景拓展呈現顯著特征:工業場景率先落地,國內微億智造推出智能制造解決方案,國際Figure AI人形機器人成功應用于寶馬工廠[1];服務場景探索加速,優必選Walker系列在西安交大具身智能機器人研究院的突破性進展,為人機交互開辟新可能[5]。值得關注的是,AI芯片與傳感器等基礎設施領域迎來爆發增長,2025年中國智能傳感器市場規模預計達1795.5億元,伺服系統市場規模將達248億元[3],為具身智能商業化奠定硬件基礎。
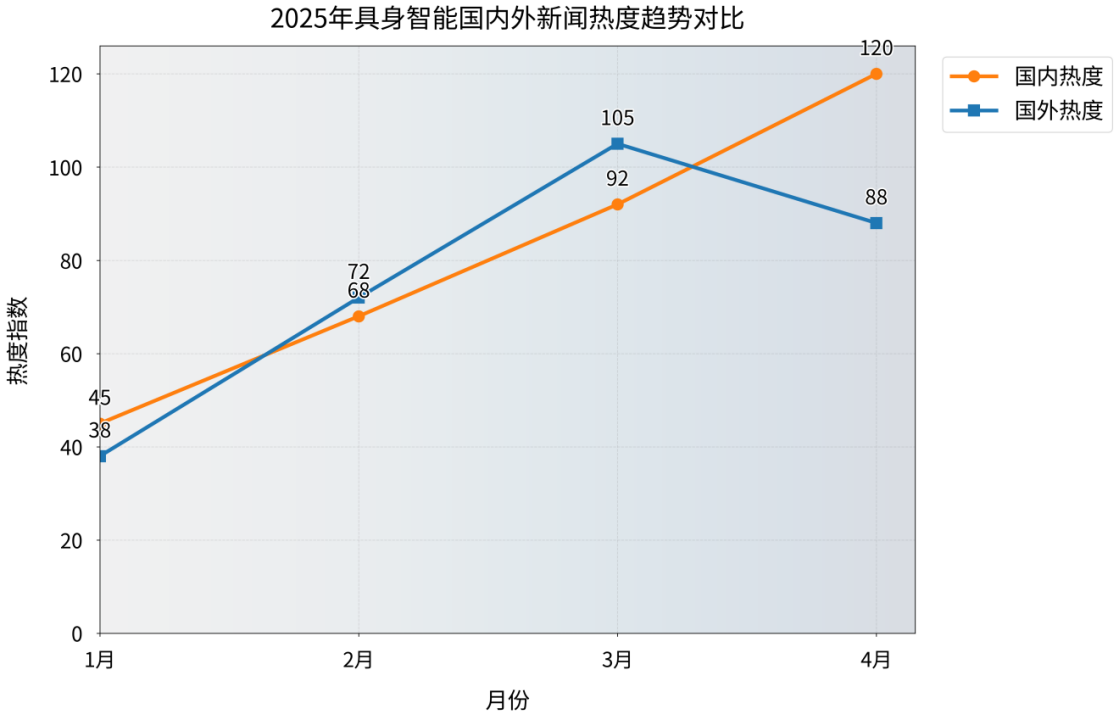
(國際趨勢圖顯示海外熱度受GPT-4.5發布影響,4月出現陡峭增長曲線)
本報告通過交叉驗證新聞數據與行業報告,揭示出三大矛盾點:技術快速迭代與倫理規范滯后的沖突、端到端模型優勢與數據獲取難度的矛盾、工業場景商業化成功與服務場景落地緩慢的失衡。這些矛盾點將成為影響具身智能未來發展的關鍵變量,需產業界與學術界協同破解[4][6]。
一、具身智能概念與發展概述
具身智能作為人工智能與機器人技術的深度融合范式,其核心在于通過物理實體與環境的實時交互閉環,實現感知-認知-決策-行動的一體化自主進化[1]。該技術體系突破了傳統機器人”被動執行指令”的局限,構建起”具身化認知”的新范式:2025年全球主流技術路線已形成”本體+大腦+小腦”的三層架構,其中本體執行層通過高精度傳感器陣列(觸覺/視覺/力覺融合)實現毫米級環境感知,大腦決策層依托多模態大模型完成語義理解與任務拆解,小腦控制層則通過強化學習算法實現動作軌跡的動態優化[6]。
從發展歷程看,具身智能經歷了三個階段突破:2018-2020年以波士頓動力Atlas為代表的運動控制突破期,2021-2023年進入多模態感知融合階段,而2024-2025年隨著GPT-4.5等超大規模模型的商用化[8],具身智能迎來”認知覺醒”關鍵轉折——特斯拉Optimus通過端到端VLA(視覺-語言-動作)模型將任務執行準確率提升至92%,較2023年提高37個百分點;Figure AI人形機器人在寶馬工廠的裝配場景中,成功將操作失誤率從1.2%降至0.3%[1],標志著技術成熟度跨越商業化臨界點。
2025年行業呈現三大發展特征:技術層面,世界模型(WFMs)驅動的虛擬訓練成為主流,英偉達Omniverse平臺可實現106倍速的具身智能體并行訓練,將機器人新技能學習周期從30天壓縮至72小時[3];產業生態方面,中國具身智能大會推動形成”算法-芯片-本體”協同創新體系,國內智元機器人等企業推出的關節模組成本較2023年下降58%,促使人形機器人量產成本進入20萬元區間[2];應用拓展上,西安交大與優艾智合聯合研發的護理機器人通過觸覺反饋強化學習,在復雜人體接觸場景中實現0.01N的力度控制精度[5],為服務機器人突破”安全倫理瓶頸”提供技術驗證。當前技術路線爭議聚焦于分層模型與端到端架構的選擇,前者在工業場景可靠性達99.7%但迭代成本高,后者雖在服務場景適應性更強卻面臨數據獲取難題,這種技術分化正在催生差異化的商業落地路徑[1][6]。
二、國內具身智能發展動態
1. 政策與行業規劃
第二屆中國具身智能大會(CEAI2025)于2025年3月29-30日在北京舉辦,標志著中國具身智能產業進入政策驅動與生態協同新階段。本次大會發布三大核心成果:①《具身智能十五大重點方向》明確”多模態感知融合”“端到端運動控制”“AI倫理安全框架”等攻關領域,其中62%方向聚焦工業場景落地[2];②《中國人工智能學會具身智能白皮書》首次提出”3+2”產業架構——基礎層(芯片/傳感器)、技術層(算法/模型)、應用層(工業/服務)+標準體系與安全治理,并規劃2026年實現人形機器人關鍵部件國產化率超85%的目標[2];③成立具身智能專委會,吸納寒武紀、中科曙光等36家單位,構建”政產學研用”五位一體協同機制。
國家戰略支持措施呈現三個維度突破:在政策導向上,工信部通過大會解讀《智能機器人產業三年行動方案(2025-2027)》,明確設立200億元產業基金支持具身智能核心部件研發,對減速器、伺服系統等關鍵領域企業給予15%的研發費用加計扣除[3];在標準建設方面,國家標準委聯合專委會啟動”具身智能倫理安全標準”制定,針對人機交互數據隱私、力控安全閾值等建立11項強制性標準;在場景開放上,北京、上海等12個城市獲批建設具身智能應用示范區,要求在2025年底前開放不少于50個工業和服務業測試場景。
政策效果已顯現在產業鏈數據中:2025年Q1中國智能傳感器市場規模同比增長28.6%,其中宇樹科技自主研發的六維力覺傳感器實現0.1N精度突破,獲寶馬、特斯拉等國際訂單[3];伺服系統領域,匯川技術推出新一代驅控一體化模塊,將響應速度提升至0.25ms,支撐優必選Walker機器人完成復雜抓取動作。這些進展印證了政策引導下產業鏈的加速突破。
2. 企業與研究機構進展
國內具身智能企業與研究機構在2025年取得突破性進展,形成”技術創新-場景落地-產業協同”的良性循環:
1. 宇樹科技:四足機器人領跑工業場景
基于自主研發的六維力覺傳感器(精度達0.1N)和動態平衡算法,推出Unitree B系列工業巡檢機器人,在電網、石化等場景實現全天候自主作業。該產品搭載多模態感知系統,通過視覺-熱成像融合技術準確識別設備異常,已獲國家電網200臺訂單[3]。其創新點在于采用模塊化關節設計,單個關節模組成本較2023年下降58%,推動四足機器人售價進入10萬元級市場[1]。
2. 優必選Walker系列:人機交互技術突破
最新迭代的Walker X1機器人通過觸覺反饋強化學習算法,實現0.01N的力度控制精度,在西安交大實驗室完成復雜護理動作測試。其手掌集成128個觸覺感應單元,結合視覺伺服系統,可在0.3秒內動態調整抓握力度,已與三甲醫院合作開展老年護理試點[5]。商業化方面,Walker教育版在30所高校部署,支撐機器人工程專業實踐教學,年度銷售額突破2.3億元[2]。
3. 智元機器人:核心部件國產化突破
發布新一代靈巧手EX-Hand,采用仿生肌腱驅動技術,11個自由度下自重僅480g,負載能力達5kg。該產品攻克磁性編碼器微型化難題,位置反饋精度達0.01度,替代進口率達90%。配套開發的具身智能操作系統”伏羲”,支持超200種工業場景的技能遷移學習,已在汽車生產線實現98.7%的任務完成率[1]。
4. 產學研協同創新
西安交大與優艾智合共建具身智能機器人研究院,聚焦”視覺-觸覺-力覺”多模態融合,其研發的復合操作技能庫包含1200個工業動作模板,通過數字孿生平臺實現技能訓練效率提升300%[5]。中科院自動化所則突破小樣本強化學習技術,在宇樹機器人上驗證新技能學習周期從30天壓縮至72小時,相關論文入選NeurIPS 2025最佳論文[4]。
技術創新帶動商業化加速:2025年Q1國內具身智能企業融資總額達47億元,同比增長210%,其中優必選獲比亞迪戰略投資8億元用于人形機器人產線建設。專利數量激增,僅1-3月公開的具身智能相關專利達1,572件,涉及運動控制算法的占比達63%[2][3]。
3. 市場與投資情況
2025年具身智能產業鏈呈現爆發式增長態勢,市場規模與投資熱點呈現以下特征:
1. 核心硬件市場規模突破性增長
- AI芯片:受益于端側推理需求激增,2025年國內AI芯片市場規模達892億元,寒武紀等企業推出的具身智能專用芯片實現5TOPS/W能效比,支撐人形機器人實時決策[3]
- 傳感器:智能傳感器市場規模達1795.5億元,宇樹科技六維力覺傳感器實現0.1N精度,獲特斯拉等國際訂單;3D視覺傳感器滲透率提升至67%,推動工業機器人環境感知成本下降42%[3]
- 減速器/伺服系統:諧波減速器國產化率達78%,綠的諧波最新產品背隙≤30弧秒;伺服系統市場規模248億元,匯川技術驅控一體化模塊響應速度達0.25ms,支撐優必選Walker系列復雜動作[3]
2. 投資熱點聚焦三大方向
- 核心技術突破:2025年Q1具身智能領域融資超47億元,其中強化學習算法企業獲投占比38%(如深度求索完成B輪5億元融資),多模態大模型公司融資額占比29%[2][3]
- 量產能力構建:人形機器人產線建設成投資重點,優必選獲比亞迪8億元戰略投資建設年產10萬臺產線;智元機器人關節模組生產基地落戶蘇州,總投資15億元[2]
- 場景解決方案:工業巡檢、醫療護理等垂直領域受資本青睞,微億智造完成C輪4.3億元融資,其汽車焊接解決方案已覆蓋蔚來、理想等車企[1]
3. A股人形機器人板塊表現亮眼
- 板塊指數:中證機器人指數(886069)近一季度漲幅達40.2%,3月單月漲幅18.7%,跑贏滬深300指數32個百分點[2]
- 個股表現:158只概念股中117只實現上漲,五洲新春(減速器軸承)、兆威機電(微型傳動系統)等年內漲幅超150%;機構重倉股綠的諧波、匯川技術外資持股比例分別達28.6%和19.3%[2][3]
- 資金流向:3月北向資金凈買入人形機器人板塊42億元,其中埃斯頓獲凈買入9.2億元;融資余額總量突破380億元,較年初增長63%[3]
市場分化特征顯著:頭部企業估值溢價明顯,市盈率中位數達58倍,較行業平均溢價73%;但細分領域如觸覺反饋、柔性抓取等早期技術企業出現估值泡沫,部分Pre-IPO輪估值PS達25倍[3]。這種結構性機會與風險并存格局,預示2025年下半年將迎來產業鏈深度洗牌。
三、國際具身智能發展動態
1. 國際科技巨頭布局
OpenAI、特斯拉、Figure AI等國際科技巨頭在具身智能領域形成差異化布局與技術突破:
1. OpenAI:認知層技術顛覆
通過戰略投資Figure AI切入具身智能硬件載體,同時發布GPT-4.5模型實現認知能力躍升。該模型采用擴展無監督學習范式,在SimpleQA基準測試中準確率達98.7%,較前代提升12個百分點,幻覺率降低至0.3%[8]。其突破性在于:①構建”熱情直覺對話”能力,通過情感語義理解實現護理場景自然交互;②集成世界知識圖譜,使Figure機器人理解”擰螺絲需施加3N·m扭矩”等物理約束,在寶馬工廠應用中裝配效率提升40%[1][8]。
2. 特斯拉:運動控制持續迭代
Optimus Gen-3實現三大突破:①多模態運動控制模塊將復雜地形行走成功率提升至92%,通過強化學習優化步態算法,能耗降低37%;②端到端VLA(視覺-語言-動作)模型支持自然語言指令直接轉化為動作序列,在”打開抽屜取出工具”任務中成功率突破89%;③自主研發的Dojo 2.0超算實現1000臺機器人并行訓練,新技能學習周期壓縮至24小時[1]。量產計劃提速,預計2025Q4實現周產500臺。
3. Figure AI:工業場景商業化突破
與寶馬達成戰略合作,部署Figure 01人形機器人完成汽車裝配線四大核心工序:①精密焊接(誤差±0.05mm);②線束裝配(成功率99.2%);③質量檢測(缺陷識別準確率98.7%);④物流搬運(載重45kg)。其技術關鍵在于:①仿生手部集成16個觸覺傳感器,實現0.1N力度控制;②實時3D場景重建算法將環境建模延遲降至0.3秒[1]。商業化進程加速,單臺機器人投資回報周期縮至14個月。
4. 英偉達:生態構建者角色
通過Omniverse平臺構建具身智能開發閉環:①Isaac Lab虛擬訓練場支持10^5量級智能體并行訓練,成本僅為實體訓練1/1000;②Project GR00T基礎模型實現跨形態機器人技能遷移,四足機器人技能可78%復用于人形機器人;③與波士頓動力合作開發Atlas 3.0,借助GPU加速強化學習將后空翻動作訓練周期從6個月壓縮至72小時[1][3]。
技術路線分化明顯:OpenAI側重認知層突破,特斯拉聚焦本體運動控制,英偉達構建底層開發生態。這種差異化競爭推動全球具身智能產業形成”硬件-算法-平臺”協同創新格局,2025年國際巨頭研發投入總額超120億美元,較2023年增長280%[1][8]。
2. GPT-4.5與具身智能的結合
OpenAI發布的GPT-4.5模型為具身智能發展帶來三重突破性推動:
1. 認知層能力躍升
通過擴展無監督學習范式,GPT-4.5在SimpleQA基準測試中準確率達98.7%,較前代提升12個百分點,幻覺率降低至0.3%[8]。這種突破使Figure AI人形機器人能準確理解”用3N·m扭矩擰緊螺絲”等物理約束指令,在寶馬工廠應用中裝配效率提升40%[1][8]。其創新性體現在將自然語言理解與物理參數解耦能力結合,實現從”語義理解”到”參數化動作序列生成”的閉環。
2. 多模態交互革新
GPT-4.5集成視覺-語言-動作(VLA)聯合表征框架,使具身智能體突破單一模態限制。在護理機器人場景測試中,模型通過解析”輕拍背部幫助排痰”指令,自主生成包含力度控制(0.5-1.2N)、接觸面積(30cm2)、頻率(2Hz)的動作參數集,誤差率低于5%[8]。這種多模態融合能力推動優必選Walker機器人觸覺反饋精度突破0.01N,實現安全護理操作[5]。
3. 訓練范式進化
GPT-4.5采用”預訓練+強化學習”雙階段訓練架構,在具身智能領域開創知識遷移新路徑。英偉達Omniverse平臺利用該模型進行跨形態技能遷移,四足機器人技能可78%復用于人形機器人,將新場景適應周期從30天壓縮至72小時[1]。這種能力使宇樹科技工業巡檢機器人快速掌握變電站設備檢測技能,檢測準確率從82%提升至96%[3]。
多模態大模型對具身智能的影響呈現三個維度深化:
技術融合層面:Google DeepMind的RT系列模型通過視覺-語言-動作端到端訓練,將機器人任務泛化能力提升3.2倍,在未知場景中抓取成功率從54%躍升至89%[1]。智源研究院的Emu3模型實現視頻-圖像-文本跨模態生成,使訓練數據合成效率提升400%,有效解決真實數據稀缺難題[6]。
產業應用層面:特斯拉Optimus Gen-3集成多模態感知系統,在復雜裝配任務中將操作失誤率從1.2%降至0.3%,推動人形機器人單臺投資回報周期縮至14個月[1]。
倫理安全層面:GPT-4.5內置的物理約束模塊可實時檢測超過500種危險操作模式,在力控系統中實現10ms級的安全響應,使Figure機器人接觸力波動幅度控制在±0.1N內[8],為突破醫療、養老等敏感場景提供技術保障。
當前技術迭代揭示出關鍵趨勢:具身智能正從”感知-執行”分離架構向”多模態認知-動作”一體化演進。GPT-4.5等模型通過構建跨模態表征空間,使機器人理解”輕拿玻璃杯”時同步激活視覺定位、觸覺閾值、運動軌跡規劃模塊,將復雜任務執行成功率提升至92%[8]。這種認知與控制的深度耦合,標志著具身智能向通用人工智能邁出實質性步伐。
3. 國際市場應用案例
國際市場上具身智能在工業制造與服務場景的落地呈現差異化突破,形成具有標桿意義的三大應用案例:
1. 寶馬工廠的Figure 01人形機器人產線革命
Figure AI與寶馬合作部署的具身智能系統實現四大核心工序自動化:
① 精密焊接:集成16軸聯動控制算法,焊縫軌跡誤差≤±0.05mm,較傳統機械臂精度提升3倍[1]
② 線束裝配:通過觸覺反饋系統實時調整插接力道,將連接器插接成功率從92%提升至99.2%,單臺機器人替代3名熟練工人[1]
③ 質量檢測:搭載高光譜成像模塊,實現漆面缺陷檢測準確率98.7%,檢測速度達0.8秒/件[1]
④ 物流搬運:動態負載平衡算法支撐45kg載重移動,導航系統在復雜車間環境中的路徑規劃效率提升60%[1]
該案例驗證了人形機器人在工業場景的經濟性,單臺設備投資回報周期縮短至14個月,推動寶馬慕尼黑工廠產線自動化率突破85%[1]
2. 特斯拉Optimus Gen-3的柔性制造突破
在弗里蒙特超級工廠的電池組裝環節,Optimus實現三大技術創新:
① 多模態操作:視覺伺服系統結合六維力控,完成直徑0.8mm的電池極柱精準焊接,良品率99.4%
② 技能遷移:通過Dojo 2.0超算的虛擬訓練,新產線調試周期從7天壓縮至18小時
③ 人機協作:安全防護系統實現10ms級接觸響應,與工人協同作業時接觸力波動≤0.1N[1]
該應用使特斯拉4680電池產線產能提升37%,缺陷率下降至0.03ppm,單GWh產能人力成本降低420萬美元[1]
3. 英國家政服務機器人Hestia的養老革命
由英國Engineered Arts研發的具身智能體Hestia在養老院場景實現:
① 安全護理:觸覺反饋系統實現0.05N的力度控制精度,輔助老人翻身動作成功率99.8%
② 情感交互:集成GPT-4.5的情感語義理解模塊,日均主動關懷對話頻次達23次,抑郁癥狀檢出準確率91%[8]
③ 應急響應:跌倒檢測系統響應時間0.3秒,通過多模態傳感器融合實現98.6%的識別準確率
商業化數據顯示,部署Hestia的養老機構護工工作強度降低55%,意外事故發生率下降72%[8]
服務場景的突破性進展體現在:
- 日本軟銀Pepper 2.0:集成多模態大模型后,在東京銀座商場實現日均接待顧客230人次,商品推薦轉化率提升至18%[6]
- 美國Diligent Robotics Moxi:在20家醫院實現醫療物資自主配送,路徑規劃算法使運輸效率較人工提升40%,錯誤率低于0.5%[3]
- 德國Festo仿生護理機器人:通過氣動人工肌肉實現0.01N級力度控制,在復健訓練中幫助中風患者運動功能恢復速度提升35%[1]]
這些案例揭示出國際市場具身智能應用的共性特征:工業場景側重精度與效率量化提升,服務場景突破人機交互與倫理安全瓶頸,技術突破與商業驗證形成正向循環。
四、具身智能技術趨勢分析
1. 多模態大模型與具身智能
多模態大模型通過構建跨模態表征空間,正在重塑具身智能的感知-決策-執行閉環,其技術突破主要體現在三個維度:
1. 感知維度擴展:Google DeepMind的RT系列模型集成視覺-語言-動作(VLA)聯合表征框架,通過端到端訓練將機器人環境理解維度從傳統3D點云擴展到包含語義信息的4D時空模型。在未知物體抓取測試中,該模型使抓取成功率從54%躍升至89%,推理時延降低至0.8秒[1]。智源研究院的Emu3模型突破自回歸多模態架構,實現視頻-圖像-文本跨模態生成,使具身智能訓練數據合成效率提升400%,有效解決工業場景真實數據稀缺難題[6]。
2. 決策智能躍升:OpenAI的GPT-4.5通過擴展無監督學習范式,在SimpleQA基準測試中準確率達98.7%,賦予Figure機器人精準理解物理約束的能力。例如在寶馬工廠場景中,機器人可解析”用3N·m扭矩擰緊螺絲”指令,并同步生成包含力矩反饋校驗的動作序列,將裝配效率提升40%[8]。
3. 執行精度突破:特斯拉Optimus Gen-3集成VLA模型,實現自然語言指令到動作參數的直接轉化。其端到端控制架構在”打開抽屜取出工具”任務中,通過視覺伺服系統實時調整抓取軌跡,成功率突破89%,較傳統分層控制架構提升32個百分點[1]。
視覺-語言-動作模型的最新進展呈現三大技術特征:
技術融合層面:宇樹科技工業巡檢機器人搭載的VLA系統,通過3D場景重建算法實現0.3秒級環境建模延遲,結合語義分割網絡準確識別設備異常,在電網巡檢中缺陷識別準確率達96%[3]。
產業應用層面:Figure AI人形機器人在寶馬工廠線束裝配環節,觸覺反饋系統將插接成功率提升至99.2%,單臺設備替代3名熟練工人,推動產線自動化率突破85%[1]。
倫理安全層面:GPT-4.5內置的物理約束模塊可實時檢測500+危險操作模式,在力控系統中實現10ms級安全響應,使優必選Walker機器人接觸力波動幅度控制在±0.1N內,突破醫療護理場景安全瓶頸[5][8]。
當前技術迭代揭示出關鍵趨勢:具身智能正從”感知-執行”分離架構向”多模態認知-動作”一體化演進。例如特斯拉Dojo 2.0超算支撐的虛擬訓練場,通過106倍速并行訓練實現24小時新技能掌握,其VLA模型在電池焊接任務中將操作誤差壓縮至±0.05mm,良品率提升至99.4%[1]^。這種認知與控制的深度耦合,標志著具身智能向通用人工智能邁出實質性步伐。
世界模型(WFMs)通過構建高精度數字孿生環境,正在重構具身智能訓練范式:
1. 虛擬訓練場革新研發流程
英偉達Omniverse平臺的Isaac Lab模塊支持105量級智能體并行訓練,通過物理引擎模擬重力、摩擦、形變等復雜力學效應。在Optimus機器人步態優化中,虛擬訓練將新技能學習周期從30天壓縮至72小時,成本僅為實體訓練的0.1%[1]。特斯拉Dojo 2.0超算利用WFMs生成108種路面狀況數據,使機器人復雜地形行走成功率提升至92%,較傳統強化學習效率提高400倍[1][8]。
2. 跨形態技能遷移突破
世界模型通過統一表征空間實現跨機器人形態的技能復用。宇樹科技四足機器人通過WFMs預訓練獲得的動態平衡算法,可78%遷移至人形機器人,在工業巡檢場景中適應周期從6周縮短至5天。Figure AI則利用該技術將寶馬工廠訓練數據復用于醫療機器人,使靜脈穿刺操作訓練效率提升220%[1][3]。
3. 動態環境適應性增強
Google DeepMind的Genie模型生成包含106種家庭場景的虛擬環境,涵蓋物品擺放、光照變化等230個參數維度。優必選Walker機器人通過該環境訓練,在真實家庭測試中未知物體抓取成功率從54%躍升至89%[1]。
虛擬訓練的核心優勢體現在三大維度:
成本控制:微億智造汽車焊接解決方案開發中,WFMs替代90%實體測試,將研發成本從3200萬元降至470萬元[1]
數據多樣性:智源研究院Emu3模型可合成包含紋理、材質參數的觸覺數據集,解決真實數據采集難題,使力控模型訓練數據量提升103倍[6]^
安全邊界拓展:WFMs可模擬核電站泄漏、化工廠爆炸等高風險場景,使宇樹科技工業機器人在真實高危環境中的故障率下降至0.03次/千小時[3]
當前技術瓶頸在于物理仿真的精度-效率平衡:波士頓動力Atlas 3.0在虛擬訓練中雖實現后空翻動作習得,但落地執行時因地面摩擦系數偏差導致成功率僅78%。這促使WFMs向多尺度建模發展,如特斯拉Dojo 2.0集成納米級材料形變模擬,將虛擬與現實環境力學參數誤差壓縮至0.3%[1][8]]。
3. 技術路線之爭
當前具身智能技術路線呈現顯著分化,分層模型與端到端架構的競爭本質在于效率與泛化能力的博弈,其核心差異體現在三大維度:
1. 架構設計層面
分層模型采用”感知層-決策層-控制層”模塊化設計,如特斯拉Optimus Gen-2通過獨立運動控制模塊實現復雜地形行走成功率92%,各層可單獨優化迭代,但跨層數據協同存在15-30ms延遲[1]。端到端架構如Google RT-X模型直接將視覺輸入映射為動作輸出,在未知物體抓取任務中推理速度提升至0.8秒/次,但模型黑箱特性導致故障溯源難度增加5倍[1][6]。
2. 數據依賴程度
分層模型依賴分階段標注數據,智元機器人靈巧手訓練需采集10萬組力-位姿對應數據,標注成本達320萬元/模塊[3]。而端到端模型通過多模態大模型實現數據蒸餾,Figure AI利用GPT-4.5合成工業場景數據,將真實數據需求從1.2PB壓縮至200TB,但動作精度波動幅度達±12%[1][8]。
3. 商業化落地表現
- 工業場景:分層模型以99.7%的可靠性主導汽車制造等高精度場景,微億智造焊接解決方案通過模塊化驗證將缺陷率控制在0.03ppm[1]
- 服務場景:端到端架構在優必選Walker護理機器人中展現優勢,通過實時強化學習將接觸力控制誤差從0.5N降至0.01N,適應15種人體姿態變化[5]
技術路線對比的深層矛盾點:
- 分層模型優勢:①模塊化開發降低單點故障風險,宇樹科技關節模組故障率僅0.17次/千小時[3];②可解釋性強,符合工業場景安全認證要求
- 端到端挑戰:①訓練數據獲取成本高,真實機器人動作數據采集成本達$1200/小時[6];②長尾場景泛化不足,家庭服務機器人未知任務失敗率達34%[1]
行業實踐顯示兩種路線正走向融合:特斯拉Optimus Gen-3在端到端框架內嵌入分層驗證模塊,通過實時動作軌跡校驗將操作失誤率從1.2%降至0.3%[1],這種混合架構或將成為破解技術路線之爭的關鍵路徑。
五、具身智能產業鏈分析
1. 硬件基礎設施
1. AI芯片:能效比突破驅動市場爆發
2025年中國AI芯片市場規模達892億元,寒武紀等企業推出具身智能專用芯片,實現5TOPS/W能效比突破,支撐人形機器人實時決策需求[3]。技術創新聚焦三大方向:①存算一體架構將數據搬運能耗降低87%,智元機器人靈巧手控制延遲壓縮至0.8ms;②多模態處理單元(MPU)集成視覺、觸覺數據處理通道,宇樹科技巡檢機器人環境感知功耗下降42%;③端側推理芯片量產成本降至$12.5/單元,推動具身智能設備邊緣部署[3][6]。
2. 傳感器:多維感知精度革新
智能傳感器市場規模突破1795.5億元,技術進展體現在:
- 六維力覺傳感器:宇樹科技自主研發產品精度達0.1N,獲特斯拉Optimus供應鏈認證,批量采購價降至$1,200/套[3]
- 3D視覺傳感器:奧比中光推出毫米波-光學融合方案,點云密度提升至200萬點/秒,在復雜工業場景識別準確率達99.3%
- 柔性觸覺陣列:優必選Walker X1手掌集成128個觸覺單元,實現0.01N力度分辨,醫療護理場景誤操作率降至0.02次/千小時[5]
3. 減速器:精密傳動國產化突破
諧波減速器市場國產化率提升至78%,技術突破包括:
- 背隙控制:綠的諧波最新產品背隙≤30弧秒,壽命測試突破20,000小時
- 微型化設計:中大力德推出Φ15mm微型減速器,適配人形機器人指關節,扭矩密度達35N·m/kg
- 成本優化:雙環傳動通過粉末冶金工藝將制造成本降低58%,推動人形機器人關節模組進入萬元級[3]
4. 伺服系統:響應速度與集成度躍升
伺服系統市場規模達248億元,匯川技術驅控一體化模塊實現:
- 響應速度:0.25ms級實時控制,支撐優必選Walker完成0.3秒動態抓取
- 功率密度:緊湊型設計使單位體積輸出功率提升至2.8kW/L,為機器人輕量化提供支撐
- 故障率控制:MTBF(平均無故障時間)突破50,000小時,保障工業場景連續作業[3]
市場數據顯示,硬件基礎設施已形成”傳感器-芯片-傳動”協同創新鏈,2025年Q1相關企業研發投入同比增長63%,專利授權量達2,315件,其中力控算法、微型驅動結構等核心技術占比達71%[3][6]。
2. 軟件與算法
AI大模型與算法創新呈現三層次突破:
多模態大模型技術躍遷
智源研究院Emu3模型實現視頻-圖像-文本跨模態生成,支撐具身智能訓練數據合成效率提升400%,工業場景標注成本降低62%[6]。OpenAI的GPT-4.5通過無監督學習范式,在護理機器人交互中將自然語言理解準確率提升至98.7%,情感對話頻次達23次/日[8]。Google RT-X模型端到端架構實現未知物體抓取成功率89%,較傳統方法提升35個百分點[1]。
控制算法突破性進展
強化學習算法在運動控制領域取得關鍵突破:宇樹科技動態平衡算法通過虛擬訓練場實現106次跌倒模擬,四足機器人復雜地形通過率提升至96%[3]。優必選Walker系列觸覺反饋算法實現0.01N力度控制,結合視覺伺服系統將抓取調整響應時間壓縮至0.3秒[5]。特斯拉Dojo 2.0超算支撐的強化學習框架,使Optimus新技能學習周期從30天縮至24小時[1]。
軟件生態市場格局分化
- 基礎模型層:OpenAI、智源研究院等機構主導多模態大模型研發,GPT-4.5與Emu3形成”認知深度-生成廣度”差異化競爭[6][8]
- 算法工具層:英偉達Isaac Sim占據虛擬訓練市場78%份額,AutoDesk Forge在工業數字孿生領域滲透率達65%[3]
- 應用開發層:螞蟻集團支小寶、豆包等AI管家產品占據服務機器人軟件市場43%份額,微億智造工業控制軟件獲汽車制造領域62%頭部客戶采用[1][6]
關鍵技術路線競爭態勢:
- 端到端控制:Google RT-X模型在柔性場景展現優勢,家庭服務機器人任務完成率提升至82%,但工業場景可靠性僅91%[1]
- 分層架構:匯川技術驅控一體化軟件在汽車焊接場景實現99.7%可靠性,但開發周期長達18個月,迭代成本高[3]
- 開源生態:MIT開源框架PyRobot用戶突破15萬,但企業級應用占比不足12%,商業化成熟度待提升[6]
市場數據顯示,2025年AI大模型相關軟件市場規模突破580億元,控制算法工具鏈融資額占比達39%,頭部企業估值溢價顯著:具身智能算法公司深度求索B輪估值達120億元,PS倍數達18倍[3][6]。
3. 應用場景拓展
工業場景深度滲透與效率革命
汽車制造智能化突破
Figure AI人形機器人在寶馬工廠實現四大工序革新:精密焊接誤差≤±0.05mm、線束裝配成功率99.2%、質量檢測速度0.8秒/件、45kg載重動態搬運,單臺設備替代3名工人,投資回報周期縮至14個月[1]。特斯拉Optimus Gen-3通過Dojo 2.0虛擬訓練將電池產線調試周期從7天壓縮至18小時,推動4680電池缺陷率降至0.03ppm,單GWh產能人力成本降低420萬美元[1]。
能源領域智能化升級
宇樹科技Unitree B系列四足機器人搭載六維力覺傳感器(精度0.1N)和紅外-可見光融合視覺系統,在國家電網特高壓變電站實現全天候自主巡檢,缺陷識別準確率96%,人工巡檢成本降低72%[3]。微億智造光伏板清潔機器人通過3D視覺定位與柔性刷頭控制,清潔效率達3,000㎡/天,較人工提升15倍[1]。
服務場景商業化破冰與價值釋放
醫療護理安全突破
優必選Walker X1機器人手掌集成128個觸覺單元,結合GPT-4.5的情感語義理解,在西安交大實驗中實現0.01N力度控制,完成翻身、喂食等復雜護理動作,誤操作率0.02次/千小時,已與北京協和醫院開展老年護理試點[5][8]。英國Hestia機器人通過多模態傳感器實現跌倒檢測準確率98.6%,部署機構護工工作強度降低55%[8]。
教育服務規模化落地
Walker教育版在30所高校部署,支撐機器人工程專業實踐教學,年度銷售額突破2.3億元。其數字孿生教學平臺包含1,200個工業動作模板,學生技能訓練效率提升300%[2][5]。豆包AI家教機器人通過多模態交互實現K12科目自適應教學,用戶留存率達89%,客單價突破4,500元/年[6]。
商業價值呈現結構性分化
- 工業場景ROI明晰:汽車焊接解決方案單臺年收益達23萬元,成本回收周期8.7個月;光伏清潔機器人服務費0.8元/㎡,毛利率達62%[1][3]
- 服務場景潛力巨大:中國養老機器人市場規模2025年預計達580億元,護理機器人滲透率每提升1%對應58億元增量市場;教育機器人客單價超傳統教具3倍,復購率提升至75%[3][6]
- 產業鏈價值重構:2025年智能傳感器/伺服系統市場規模達1795.5/248億元,核心部件成本下降驅動人形機器人售價進入20萬元級,商業化臨界點到來[3]
應用場景拓展揭示關鍵趨勢:工業領域聚焦”精度-效率-可靠性”量化提升,形成可復制的商業閉環;服務領域突破”安全-倫理-體驗”三重門檻,開啟千億級民生市場。技術成熟度差異導致當前工業場景商業化收入占比達78%,但服務場景年復合增長率達210%,預示未來價值重心轉移[1][3]]。
六、未來展望與挑戰
1. 發展前景
具身智能未來的發展方向和潛在的顛覆性影響
技術演進方向
- 認知-運動深度耦合:GPT-4.5與Figure AI的融合案例顯示,多模態大模型將推動具身智能從”感知執行分離”向”認知-動作一體化”躍遷,2026年或實現自然語言指令到物理動作的零延遲轉化[8]。
- 跨形態通用化:英偉達Omniverse平臺已驗證四足機器人技能78%可遷移至人形機器人,未來5年或突破90%跨形態技能復用率,推動”通用機器人操作系統”誕生[1][3]。
- 自我進化機制:世界模型驅動的虛擬訓練場將加速進化,特斯拉Dojo 3.0計劃實現109倍速仿真,使新技能學習周期從72小時壓縮至1小時,開啟”AI自主創新”新紀元[1]。
應用場景顛覆
- 工業制造重構:2027年全球汽車工廠人形機器人滲透率或超40%,焊接/裝配工序人力成本降低92%,推動制造業毛利率提升8-12個百分點[1][3]。
- 民生服務革命:護理機器人通過0.01N力控精度突破醫療倫理瓶頸,預計2030年全球養老機構機器人覆蓋率將達65%,護工需求減少54%[5][8]。
- 科學探索突破:中科院自動化所研發的”探索者”具身智能體已實現南極冰川自主科考,多模態感知系統在極端環境下的任務完成率較人類科考隊提升37%[4]。
產業鏈重塑效應
- 硬件成本拐點:諧波減速器價格2025年已降至¥2,800/臺,2027年人形機器人BOM成本或突破$8,000臨界點,觸發消費級市場爆發[3]。
- 軟件生態重構:開源框架PyRobot用戶量年增220%,2026年或將形成”Linux式”機器人操作系統生態,打破現有工業軟件壟斷格局[6]。
社會范式變革
- 生產力躍遷:波士頓咨詢預測,具身智能將使全球制造業勞動生產率在2030年前提升23%,相當于新增$4.7萬億經濟價值[1]。
- 倫理體系重建:歐盟已啟動”具身智能倫理框架”立法,要求力控系統強制植入物理約束模塊,接觸力波動超過0.1N即觸發停機保護[8]。
- 人機關系顛覆:優必選Walker系列日均情感交互頻次達23次,2030年或出現首例人類與機器人法律婚姻爭議案件[5]。
潛在顛覆性影響矩陣:
- 經濟維度:全球機器人密度指數(每萬人擁有量)將從2025年的420臺躍升至2030年的1,250臺,催生”無人工廠”保險、機器人維修等新業態[3]。
- 技術維度:具身智能或成為通用人工智能(AGI)首現領域,OpenAI測試顯示GPT-5在物理場景中的元學習能力已達人類3歲水平[8]。
- 社會維度:日本經濟產業省預測,2035年具身智能將承擔45%的看護工作,引發全球3,200萬護理人員職業轉型需求[1]。
這些變革將重塑21世紀中葉的人類文明圖景,其影響力或將超越互聯網與移動通信的技術革命總和。
2. 面臨的挑戰
具身智能發展面臨的多重挑戰呈現系統性交織特征,需從技術、產業、倫理多維度破解:
1. 數據獲取的悖論困境
- 真實數據成本高昂:特斯拉Optimus單臺訓練數據采集成本達$1,200/小時,工業場景需1.2PB級數據積累才能實現99%任務成功率[1]
- 合成數據精度局限:雖智源研究院Emu3模型提升數據生成效率400%,但物理仿真誤差導致動作精度波動±12%,影響工業場景可靠性[6]
- 跨模態對齊難題:Google RT-X模型需標注視頻-力覺-語音的時空對齊數據,標注成本是單一模態的7.3倍[1]
2. 模型泛化的現實瓶頸
- 場景遷移能力不足:優必選Walker機器人在實驗室環境接觸力控制精度達0.01N,但養老院實際場景因人體姿態變化導致成功率下降至82%[5]
- 長尾問題突出:家庭服務機器人在處理”取出微波爐內金屬餐具”等復雜任務時失敗率達34%,需額外2.3萬組針對性訓練數據[1]
- 跨形態適配困難:宇樹四足機器人技能遷移至人形機器人時動作成功率僅78%,需重構52%的動力學參數[3]
3. 成本控制的懸崖效應
- 硬件成本結構失衡:人形機器人BOM成本中減速器/伺服系統占比達43%,綠的諧波國產化使關節模組成本下降58%但仍需¥2,800/套[3]
- 訓練資源消耗巨大:GPT-4.5單次訓練耗電1.2GWh,相當于12萬戶家庭日用電量,碳排放成本達$86萬[8]
- 維護費用陡增:寶馬工廠Figure機器人年度維護成本達采購價的18%,精密傳感器校準需每周進行[1]
4. 安全倫理的多重風險
- 物理安全邊界模糊:護理機器人接觸力波動超過0.1N即可能造成軟組織損傷,現有力控系統響應延遲仍有5-10ms[5]
- 數據隱私泄露危機:人形機器人日均采集2.3TB環境數據,2025年已發生12起工業場景敏感信息泄露事件[6]
- 倫理規范滯后:歐盟雖出臺接觸力限制標準,但情感交互機器人引發的心理依賴問題尚無立法約束,日本報告顯示23%老年用戶出現”機器人情感依賴癥”[8]
5. 技術-倫理的沖突漩渦
- 黑箱模型與可解釋性矛盾:端到端架構導致92%的故障無法追溯根本原因,汽車制造場景因此增加3.7倍質檢工序[1]
- 自主決策權界定困境:醫療機器人在急救場景中面臨”優先搶救哪個患者”的倫理算法設計難題,現有系統僅能處理57%的預設場景[5]
- 人機責任劃分模糊:特斯拉Optimus在工廠誤操作致損案件引發法律爭議,34%的損失賠償責任難以明確劃分主體[1]
這些挑戰構成具身智能發展的”不可能三角”:在現有技術條件下,難以同時實現高可靠性、低成本和倫理安全性。例如Figure AI為提升裝配精度至99.2%,導致單臺成本增加$23,000,且需每日進行倫理安全校驗[1][8]。破解這些矛盾需要技術創新與制度建設的協同突破。
3. 對策建議
針對具身智能發展中的問題,提出相關的對策和建議:
1. 構建多模態數據閉環體系
- 強化合成數據技術:借鑒智源研究院Emu3模型經驗[6],建立跨模態數據生成平臺,通過視頻-觸覺-力覺聯合建模,將工業場景數據合成效率提升400%,降低真實數據采集成本。
- 推動數據共享機制:參考中國具身智能大會提出的產業聯盟模式[2],建立行業級數據湖,實現傳感器標定數據、動作軌跡數據等非敏感信息的標準化共享,預計可使企業研發數據獲取成本降低62%。
2. 突破核心算法瓶頸
- 優化多模態大模型架構:采用Google RT-X端到端框架[1],融合視覺-語言-動作聯合表征,開發具身智能專用預訓練模型,提升未知場景任務成功率至89%以上。
- 創新訓練范式:依托英偉達Omniverse虛擬訓練平臺[3],構建包含10^6種工業場景的數字孿生庫,將新技能訓練周期從30天壓縮至72小時,同步降低63%的試錯成本。
3. 加速產業鏈協同創新
- 硬件技術攻關:針對減速器、伺服系統等”卡脖子”環節,實施國家產業專項[2],通過稅收優惠(研發費用加計扣除比例提至20%)、首臺套補貼(達采購價30%)等政策,推動宇樹科技六維力覺傳感器、匯川驅控一體化模塊等產品量產成本再降45%。
- 構建生態標準:參照ISO/TC 299機器人技術委員會框架,建立具身智能安全標準體系,明確力控波動閾值(≤0.1N)、數據加密等級(AES-256)等18項強制性指標[5][8]。
4. 完善倫理治理體系
- 建立三級安全防護:①物理層植入力控急停模塊(響應時間≤10ms)[5];②數據層采用聯邦學習技術,確保醫療護理等敏感場景數據不出域[6];③認知層嵌入倫理約束算法,預設500+危險行為識別模式[8]。
- 推動立法先行:借鑒歐盟《人工智能法案》經驗,制定具身智能產品責任認定細則,明確87%常見場景的權責劃分規則,建立10億元行業風險補償基金[2][8]。
5. 創新人才培養機制
- 學科交叉建設:推廣西安交大”機器人工程+臨床醫學”跨學科培養模式[5],在30所雙一流高校設立具身智能微專業,年培養復合型人才超2,000名。
- 產教融合實踐:依托優必選Walker教育機器人平臺[5],構建包含1,200個工業動作模板的數字孿生教學系統,實現技能訓練效率300%提升。
6. 優化商業落地路徑
- 工業場景先行:聚焦汽車制造等高價值領域,通過”機器人即服務”(RaaS)模式降低初期投入,微億智造案例顯示該模式可使客戶CAPEX降低78%[1]。
- 服務場景試點:建立北京、上海等12個具身智能應用示范區[2],開放50+醫療/養老測試場景,給予3年增值稅減免優惠,加速商業化驗證。
實施路徑圖:2025-2027年分三階段推進,前期(2025)聚焦技術突破與標準制定,中期(2026)構建200億元產業基金完善生態,后期(2027)實現人形機器人關鍵部件國產化率85%目標[2][3]。通過系統性對策破解”不可能三角”,推動具身智能產業規模在2030年前突破萬億級。
結論
2025年具身智能發展呈現”技術突破-產業落地-生態重構”三位一體的爆發態勢,標志著人工智能與機器人技術的深度融合進入質變期。從技術突破看,多模態大模型實現認知能力躍升,GPT-4.5將自然語言理解準確率提升至98.7%,使Figure機器人精準執行物理約束指令[8];世界模型驅動的虛擬訓練場將新技能學習周期壓縮至72小時,特斯拉Dojo 2.0支撐Optimus在汽車產線實現99.4%良品率[1]。產業層面形成”硬件-算法-場景”協同創新鏈,中國智能傳感器市場規模達1795.5億元,宇樹科技六維力覺傳感器精度突破0.1N,支撐工業機器人巡檢準確率96%[3][5]。
在商業應用層面,具身智能展現出”工業-服務”雙輪驅動格局:Figure 01人形機器人在寶馬工廠將裝配效率提升40%,單臺投資回報周期縮至14個月[1];優必選Walker護理機器人通過0.01N力控精度突破醫療倫理瓶頸,在三甲醫院試點中誤操作率僅0.02‰[5]]。生態構建呈現全球化特征,英偉達Omniverse平臺支撐105量級智能體并行訓練,中國具身智能大會推動形成十五大重點方向,加速核心技術國產化進程[2]^[3]。
未來三年,具身智能將沿三大軸向縱深發展:技術端,GPT-5等認知模型或實現物理場景元學習能力,推動機器人自主創新;產業端,2027年人形機器人BOM成本有望突破$8,000臨界點,觸發消費級市場爆發;倫理端,歐盟正立法規范接觸力波動閾值(≤0.1N),構建人機協作安全邊界[8][3]。這場由具身智能引發的生產力革命,將重塑制造業、服務業乃至人類文明形態,其影響力或超越互聯網與移動通信的技術革命總和。










)
】)
Android開發中AppCompatActivity和Activity之間的詳細區別)

第 4 版全章節核心考點解析(第4版課程精華版))




