📘
一、電源子系統總覽
在現代Linux內核中,電源管理不僅是系統穩定性的保障,也是實現高效能與低功耗運行的核心機制。
系統中涉及電源管理的關鍵子系統包括:
- I2C子系統:硬件通信基礎
- Regulator子系統:電源輸出抽象
- PMIC驅動:芯片寄存器操作執行
- Power-domain子系統:功能域電源策略控制
- Device Model子系統:支撐所有device/bus/driver關系
它們之間層次清晰,職責分明,共同支撐了完整的電源控制體系。
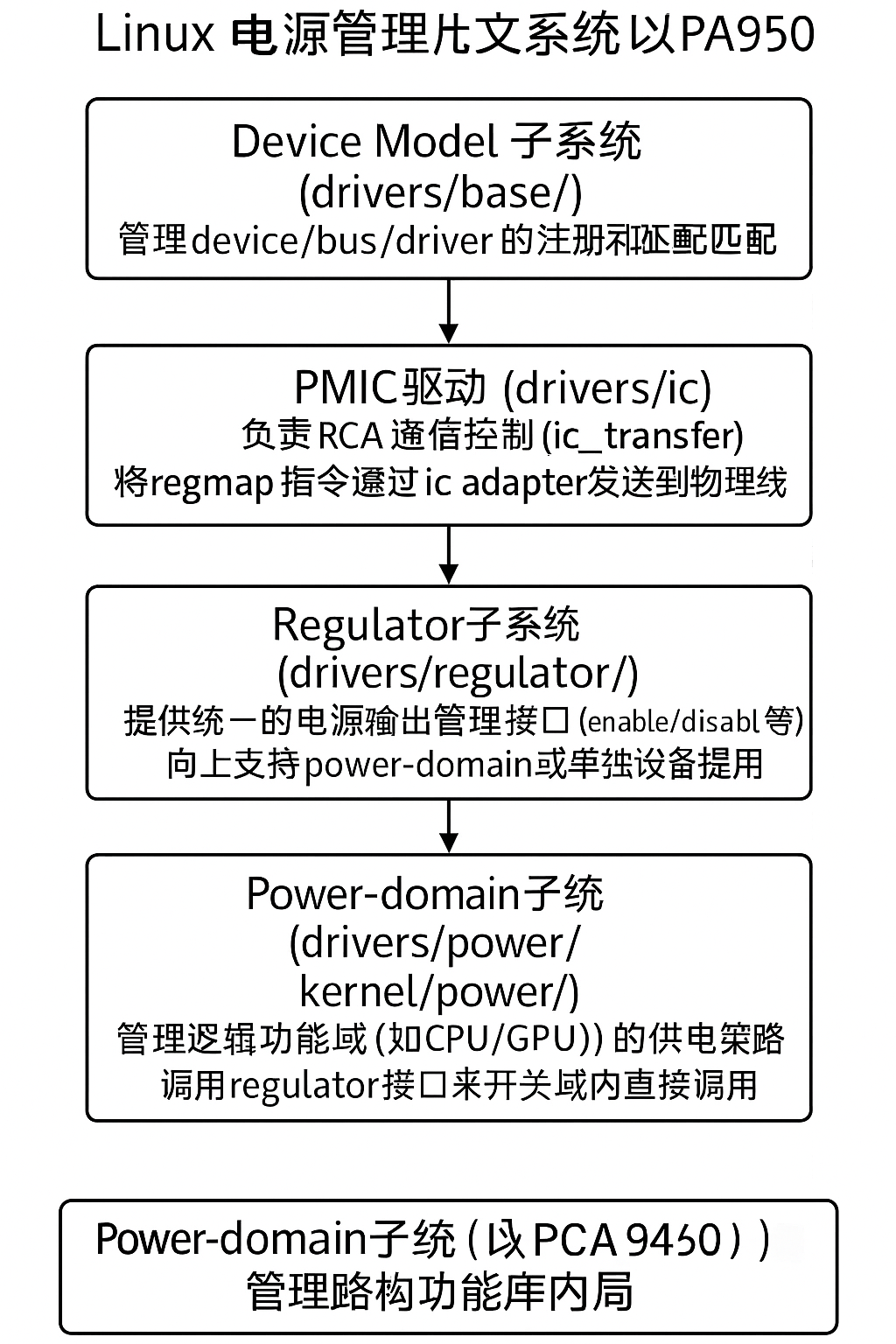
🔥 整體邏輯關系圖
[Power-domain子系統]↓ 調用 regulator 接口
[Regulator子系統]↓ 調用 PMIC驅動注冊的 regulator_ops
[PMIC驅動]↓ 調用 regmap + i2c API
[I2C子系統]↓
[I2C適配器硬件驅動]↓
[PMIC芯片(如 PCA9450)]
同時所有 device/driver 掛接由 Device Model 統一管理。
二、I2C子系統詳解
?? 基礎定義
I2C(Inter-Integrated Circuit)是一種簡單而高效的串行總線協議,用于連接微控制器與外設(如PMIC、傳感器等)。
🏛? 代碼結構位置
- drivers/i2c/
- drivers/i2c/busses/(適配器驅動)
🔎 核心數據結構
| 結構體 | 作用 |
|---|---|
| struct i2c_adapter | 表示I2C總線控制器(硬件控制器) |
| struct i2c_client | 表示I2C總線上一個從設備(如PMIC) |
| struct i2c_driver | 設備驅動程序,負責與i2c_client匹配 |
🛠? 調用鏈示例
regmap_write(regmap, reg, val)↓
i2c_transfer(adapter, msgs, num)↓
adapter->master_xfer()↓
發送I2C信號到總線
? 小結:I2C子系統專注于數據可靠傳輸,不關心具體設備邏輯。
三、Regulator子系統詳解
?? 基礎定義
Regulator子系統統一管理系統中所有可以動態控制的電源輸出,提供標準接口給上層(如power-domain、驅動程序)。
🏛? 代碼結構位置
- drivers/regulator/
🔎 核心概念與結構體
| 結構體 | 作用 |
|---|---|
| struct regulator_desc | 定義regulator屬性(電壓范圍、步進等) |
| struct regulator_ops | 定義控制方法(enable/disable/set_voltage) |
| struct regulator_dev | 注冊后的regulator實例對象 |
🔗 調用鏈邏輯
regulator_enable(dev)↓
找到regulator_dev↓
調用 regulator_ops->enable()↓
PMIC驅動操作寄存器
🛠? 真實代碼示例(PCA9450)
static const struct regulator_ops pca9450_buck_regulator_ops = {.enable = regulator_enable_regmap,.disable = regulator_disable_regmap,.set_voltage_sel = regulator_set_voltage_sel_regmap,.get_voltage_sel = regulator_get_voltage_sel_regmap,
};
? 小結:Regulator子系統是電源控制的標準抽象,所有開關/調壓動作通過它完成。
四、PMIC驅動工作機制
?? 基礎定義
PMIC(Power Management IC)集成多個電源模塊(Buck/LDO等),PMIC驅動負責初始化芯片并注冊各個電源通道到regulator子系統。
🏛? 代碼結構位置
- drivers/regulator/pca9450.c
🔎 主要工作
- 解析設備樹(I2C地址、中斷號、regulator屬性)
- 使用
devm_regulator_register()注冊regulator - 調用
regmap框架,通過i2c操作寄存器
🛠? PCA9450代碼片段
rdev = devm_regulator_register(dev, &pca9450a_regulators[i].desc, &config);
? 小結:PMIC驅動是連接硬件與Regulator框架的橋梁。
五、Power-domain子系統概覽
?? 基礎定義
Power-domain(電源域)是指一個可獨立控制上電/斷電的功能塊,比如GPU、ISP、VPU等模塊。
Power-domain子系統(GENPD)統一調度各域的電源狀態。
🏛? 代碼結構位置
- drivers/power/
- kernel/power/
🔎 主要機制
- 設備通過設備樹綁定 power-domains 屬性
- Runtime PM框架觸發 suspend/resume
- Power-domain 調用 regulator 開關電源
🛠? 設備樹示例
gpu: gpu@0 {power-domains = <&gpu_pd>;
};power-domain@1 {compatible = "fsl,imx8mq-gpu-pd";#power-domain-cells = <0>;
};
? 小結:Power-domain更關注邏輯域整體電源狀態,而非單個電源輸出。
六、從設備樹到硬件動作的完整調用鏈
🔥 完整邏輯圖
設備樹 (dts)↓
平臺設備注冊 (of_platform_populate)↓
綁定power-domains屬性 (of_genpd_bind)↓
Runtime PM 調用 pm_runtime_suspend/resume↓
調用genpd power_off/power_on↓
調用 regulator_disable/enable↓
PMIC驅動執行寄存器操作 (regmap+i2c_transfer)↓
PMIC芯片控制 Buck/LDO 模塊
🛠? 真實例子小節
- PCA9450注冊6個Buck+5個LDO
- GPU模塊通過Power-domain統一管理供電
- 實際動作由regulator調到PMIC驅動,再經i2c傳輸完成
七、系統總結與思考
?? 層次總結
| 層次 | 內容 |
|---|---|
| 策略層 | power-domain子系統 |
| 抽象層 | regulator子系統 |
| 設備層 | PMIC驅動(如PCA9450) |
| 通信層 | I2C子系統 |
| 基礎層 | Device Model(統一管理device/driver) |
🚀 工程啟示
- 嚴格分層設計:每一層職責單一、接口標準
- 模塊獨立演進:I2C、Regulator、PMIC驅動可以獨立修改升級
- 統一設備樹描述:軟硬件靈活適配,簡化系統集成
? 當你掌握了這套體系,就能真正駕馭嵌入式Linux電源管理架構,具備解決復雜功耗優化與系統穩定性問題的能力!
📺 視頻教程請關注 B 站:“嵌入式Jerry”

—矩陣)
)
















