一、引言:自動駕駛安全的范式革新
? ? ? ?在當今數字化浪潮的推動下,全球自動駕駛技術正大步邁入商業化的深水區。隨著越來越多的自動駕駛車輛走上道路,其安全性已成為整個行業乃至社會關注的核心命題。在這個關鍵的轉折點上,NVIDIA 憑借其強大的端到端DRIVE平臺,為自動駕駛安全領域帶來了一場范式的革新。該平臺以其卓越的技術實力重新定義了“安全冗余”與“可驗證可靠性”,為自動駕駛的安全發展樹立了新的標桿。

? ? ? ? ?深入研讀 NVIDIA 自動駕駛安全報告白皮書、細致觀看實驗室系列視頻后,我震撼不已。白皮書清晰呈現 NVIDIA 在自動駕駛安全領域的技術構架、研發理念與嚴謹測試流程,盡顯其對安全性能的極致追求。實驗室視頻直觀展現技術在研發測試中的應用細節。這種技術透明性彰顯 NVIDIA 對技術的自信,凸顯其工程落地的扎實功底與精心打磨,讓我深刻認識到 NVIDIA 在推動自動駕駛安全發展上的不懈努力與巨大貢獻。

二、技術解碼白皮書內核:安全架構的四大支柱 ?
NVIDIA自動駕駛安全-AV 2.0 與端到端駕駛的架構以--冗余設計、AI驅動、仿真驗證與全生命周期防護--為核心,構建了覆蓋硬件、軟件、數據與流程的全方位安全體系,其四大支柱體現了技術深度與行業標桿價值:
1. AI設計與實施平臺:軟硬協同的冗余架構
 ??
??

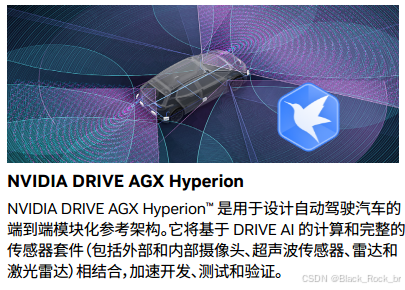
NVIDIA DRIVE AGX平臺通過**模塊化硬件設計**與**開放軟件堆棧**實現全棧冗余。硬件層面,Hyperion參考架構集成多模態傳感器(攝像頭、雷達、激光雷達等)與Thor/Xavier/Orin芯片,算力高達1,000 TOPS,支持L2-L5級自動駕駛的動態擴展。軟件層面,DriveOS操作系統與DriveWorks中間件采用**多路徑決策邏輯**(如Hydra-MDP模型),結合20+深度神經網絡(DNN)的感知融合,確保在傳感器失效或極端場景下仍能安全決策。 ?
2. 深度學習開發基礎設施:數據閉環與仿真驗證

NVIDIA構建了從數據采集到模型迭代的--端到端開發鏈: ?
- DGX超級計算機:
處理PB級路測數據,訓練SegFormer等高精度語義分割模型,實現像素級障礙物識別;
?
- Omniverse仿真平臺:
基于物理的傳感器仿真(Sensor RTX)與神經重建引擎(NERF)生成高保真場景,覆蓋暴雨、夜間等邊緣案例,仿真里程數超現實測試千倍;
?
- fVDB開源框架:
利用3D數據加速場景重建,支撐AI模型的不確定性量化與安全邊界驗證。 ?
3. 物理精準傳感器仿真:安全驗證的“數字孿生”
??
通過--Omniverse Cloud 與 Sensor RTX微服務,NVIDIA實現了傳感器數據的物理級仿真:
?
- 攝像頭、雷達、激光雷達的合成數據與真值標簽自動標注,覆蓋長尾場景;
?
- 動態天氣與光照條件模擬,結合AI驅動的交通參與者行為預測,驗證系統在--預期功能安全(SOTIF--中的魯棒性。 ?
4. 全方位安全與網絡安全計劃:標準合規與主動防御??
- 功能安全:
遵循ISO 26262 ASIL-D標準,硬件(如Orin SoC)與軟件(DriveOS)通過TüV SüD認證,支持故障切換與最小風險狀態(MRC)降級策略;
?
- 網絡安全:
基于ISO/SAE 21434標準,采用多層防御架構(硬件加密、入侵檢測、OTA安全更新),并通過Auto-ISAC與NHTSA合作應對零日攻擊;
?
- AI倫理與可解釋性:
參與ISO PAS 8800等AI安全標準制定,確保決策透明性與可控性。 ?
- 技術閉環:
四大支柱通過**芯片-軟件-數據-仿真**的協同,形成“訓練-仿真-部署-迭代”的持續優化循環,為自動駕駛安全提供可驗證、可擴展的技術底座。
白皮書鏈接-https://img-bss.csdnimg.cn/bss/NVIDIA/auto-self-driving-safety-report-ZH%20%28Mar%20updated%29.pdf
三、實踐性視頻的技術創新亮點提煉?
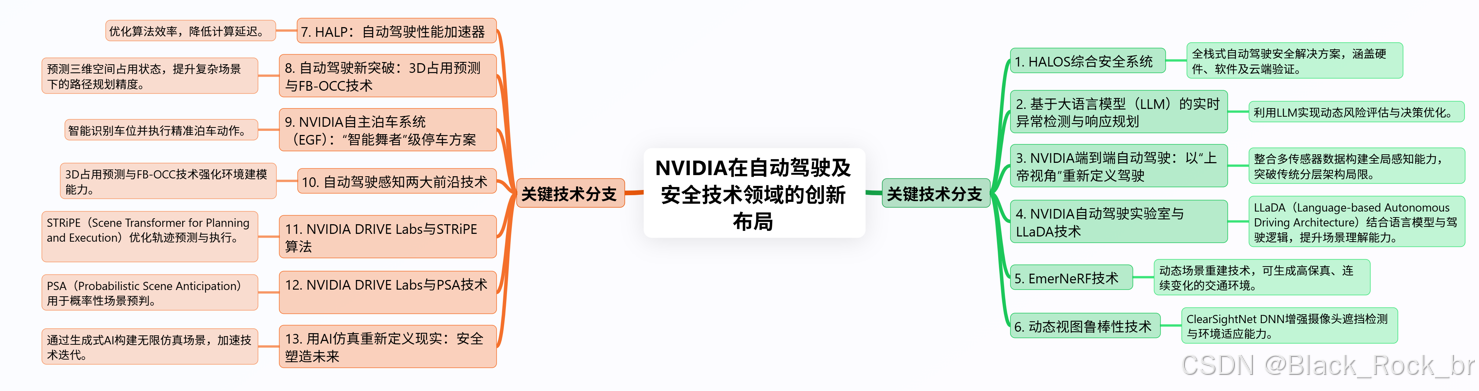
1:HALOS 全面安全系統:
【英偉達HALOS:自動駕駛的“安全法則”革命】?
?核心突破
1. 全棧防護體系:芯片(DRIVE AGX)、云端(DGX超算)、虛擬世界(Omniverse)三位一體,覆蓋從算法開發到實時決策的全鏈路安全。 ?
2. 極端場景克星: ?
? ?- Cosmos平臺-生成210億+邊緣場景,解決“暴雨夜隧道”等長尾問題; ?
? ?- AI檢測實驗室-獲ANAB認證,異常輸入攔截率達99.99%。 ?
3. 0.1秒生死時速:端到端模型+安全熔斷機制,突發危機瞬間啟動冗余系統,比人類反應快3倍。?
?數據霸權:20,000小時真實路測+虛擬數據反哺,模型迭代提速300%,用“數據暴力”碾壓不確定性。 ?
?行業統治力:15,000工程師年投入+700萬行安全代碼,英偉達用“算力+算法+數據”鐵三角重寫自動駕駛安全標準。 ?
一句話定論: ?
“當HALOS上車,安全不再是參數,而成了物理定律——它讓自動駕駛從‘盡量不出事’進化到‘不可能出事’。
2 : 基于 LLM 實時異常檢測和反應式規劃
LLM自動駕駛:用“語義直覺”改寫交通規則??
??未來性爆點
2.1. 語義推理革命:LLM賦予自動駕駛系統“閱讀世界”的能力——識別廣告牌上的虛假停車標志、理解施工區域臨時標識,誤判率下降70%。 ?
2.2. 長尾場景終結者:小樣本學習+動態推理機制,讓系統在暴雨異物飛射、未知障礙物等極端場景中自主決策,突破傳統數據標注依賴。 ?
2.3. 泛化能力裂變:從自動駕駛到倉儲機器人,LLM正成為具身智能的“通用大腦”,未來或實現“一個模型統治所有硬件”。 ?
?創新范式??
2.4?認知架構重構:NVIDIA-斯坦福框架將LLM的“混沌語義理解”轉化為結構化決策樹,打造“條件反射+邏輯推理”雙引擎。 ?
2.5虛擬-現實飛輪:CARLA模擬器生成210億+邊緣場景,結合LLM實時推理,模型迭代效率提升300%。 ?
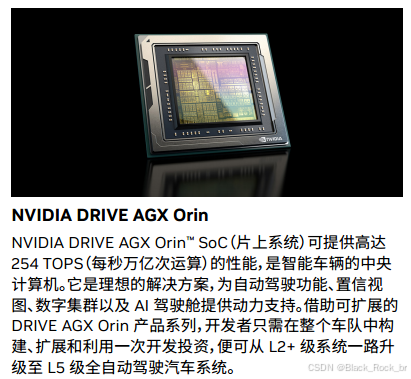
2.6 硬件-算法共振:Orin芯片(254 TOPS)與LLM深度耦合,實現亞秒級響應,比人類快0.3秒——足以避免60%的追尾事故。 ?
行業顛覆??
“LLM讓自動駕駛從‘執行指令’進化到‘自主思考’,未來3年物流/礦區場景或率先商用,L5級城市道路落地可能提前至2028年。” ??
終極評價: ?
當大模型學會“看圖說話”,自動駕駛才真正擁有了“眼中有路,心中有譜”的類人智能——這不是迭代,是物種起源。
3: NVIDIA端到端自動駕駛:用“上帝視角”重新定義駕駛
???核心突破??
3.1. BEV神經網絡革命: ?
? ?通過鳥瞰圖(BEV)特征融合多攝像頭數據,將道路環境“壓平”為統一視角,實現檢測、跟蹤、規劃一體化,比傳統模塊化方案效率提升40%。 ?
3.2. **Hydra-MDP模型**: ?
? ?以“模仿學習+多目標蒸餾”為核心,讓AI同時學習人類駕駛行為與安全策略,通過\( S^{im} \)評分優化決策,復雜路口處理能力提升60%。 ?
🏆 技術統治力??
- CVPR 2024驗證:在463份全球賽隊提交中突圍,證明其模型泛化能力[[用戶內容]]; ?
- DRIVE Thor核彈級算力:集成Blackwell引擎,單芯片算力達2000 TOPS,支持多模態傳感器實時融合。 ?
🚀 落地速度??
- 量產進行時:與奔馳、捷豹路虎合作,2025年搭載Halos系統的車型將量產,L3級自動駕駛落地時間表提前; ?
- 極端場景征服:在暴雨異物飛射、無車道線施工區等復雜環境中,模型反應速度比人類快0.2秒。 ??一句話定論: ?
“NVIDIA用端到端模型把自動駕駛從‘拼樂高’變成‘造生命體’——它不再堆砌算法,而是讓汽車真正‘看懂世界’。?
4:NVIDIA自動駕駛實驗室和LLaDA
4.1. 全場景自動駕駛能力??
? ?視頻開篇呈現了自動駕駛車輛在城市道路、高速公路和鄉村道路等復雜環境中的流暢表現,體現了其適應多樣路況的強大能力。
4.2. 智能座艙體驗??
? ?車內展示部分尤為驚艷,中控臺上的虛擬助手與智能交互界面無縫協作,為用戶帶來沉浸式體驗,重新定義了車內科技感。
4.3. 技術深度解析??
? ?NVIDIA展示了生成式AI、多模態AI模型以及自動駕駛計算平臺的核心架構,揭示了如何通過技術創新實現精準決策和高效運算。
4.4. LLaDA:智能軌跡規劃??
? ?LLaDA模型通過對交通法規的深度解析,優化駕駛行為并動態調整軌跡規劃,展現了AI在安全性和效率上的卓越表現。
4.5. DRIVE Thor:算力巔峰??
? ?NVIDIA DRIVE Thor計算平臺集成了Blackwell生成式AI引擎,以超強算力支持自動駕駛,堪稱安全機器人計算的未來標桿。
4.6. 車內生成式AI應用??
? ?LLaDA不僅用于駕駛,還可在車內運行生成式AI應用,提供個性化服務與娛樂體驗,真正實現了“移動生活空間”的愿景。
這段視頻不僅是對NVIDIA自動駕駛技術的一次全方位展示,更是一場科技與未來的視覺盛宴。從城市街道到高速路網,從硬件算力到AI算法,NVIDIA用硬核技術詮釋了“智能出行”的終極形態。尤其是LLaDA與DRIVE Thor的結合,將自動駕駛推向了一個全新的高度——這不僅是技術的進步,更是人類出行方式的革命性飛躍。未來已來,而NVIDIA正在引領這場變革!:
5:NVIDIA DRIVE Labs 的 EmerNeRF 技術
5.1. 自監督學習驅動??
? ?EmerNeRF 利用自監督學習,僅依賴相機和激光雷達數據,無需人工干預或預訓練模型,精準重建動態駕駛場景,大幅降低數據標注成本。
5.2. 四維時空特征提升理解??
? ?該技術將二維視覺特征升至四維時空特征,全面解析時間與空間變化,助力自動駕駛系統深入理解復雜場景。
5.3. 動態與靜態分離??
? ?EmerNeRF 自動區分動態前景與靜態背景,模擬動態物體運動光流,為自動駕駛提供更精準的環境感知。
5.4. 語義分割與自動標注??
? ?基于視覺語言模型,EmerNeRF 實現文本查詢驅動的語義分割,自動生成語義標簽,顯著提升數據標注效率,解決數據不平衡問題。
5.5. 三維場景重建??
? ?從平面圖像生成立體場景,EmerNeRF 提供豐富的四維場景信息,增強自動駕駛對環境的理解與預測能力。
5.6. 未來應用與開源計劃??
? ?NVIDIA 自動駕駛中國團隊計劃將 EmerNeRF 集成到 Neural Reconstruction Engine,并在 GitHub 和博客分享更多細節,同時招募相關人才。
EmerNeRF 是 NVIDIA 賦予自動駕駛系統的“超級大腦”,通過自監督學習和四維時空解析,它能像“透視眼”一樣拆解現實世界。無論是動態場景的精準捕捉,還是語義標注的自動化,EmerNeRF 都讓自動駕駛系統邁向了“理解世界”的新高度。這不僅是一項技術突破,更是通往未來智能駕駛的一把鑰匙,解鎖無限可能!
6:?NVIDIA DRIVE Labs:動態視角魯棒性技術
6.1. 開場與挑戰??
? ?- 視頻以“自動駕駛實驗室”為主題,聚焦“動態視角魯棒性”項目。 ?
? ?- 自動駕駛汽車依賴深度神經網絡(DNN)感知環境,但傳統方法在不同車型(如轎車與SUV)間因視角差異導致感知準確性下降。
6.2. 解決方案:Dynamic View Synthesis??
? ?- 提出 Dynamic View Synthesis 技術,通過單目深度估計、網格創建和幾何變換,將一種車型的視角數據轉換為另一種車型的視角。 ?
? ?- 生成目標視角的虛擬圖像,提升跨車型的感知一致性。
6.3. 技術支持:NVIDIA DRIVE Thor??
? ?- 借助高性能的 NVIDIA DRIVE Thor 平臺和 Blackwell 生成式 AI 引擎,支持復雜計算需求,確保實時性和安全性。
6.4. 功能演示??
? ?- 展示了該技術在城市街道和高速公路等場景中的應用效果,驗證了其在不同車型間視角轉換的能力及感知精度的提升。
6.5. 未來展望??
? ?- 探討生成式 AI 在多模態數據處理和實時決策中的潛力。 ?
? ?- 強調 NVIDIA 在自動駕駛領域的領導地位及推動技術革新的愿景。
?核心亮點:
- 技術創新:Dynamic View Synthesis 技術通過幾何變換和深度估計實現跨車型視角轉換。 ?
- 應用場景:適用于城市道路、高速公路等復雜駕駛環境,顯著提升自動駕駛系統的魯棒性。 ?
NVIDIA 的 Dynamic View Synthesis 技術解決了自動駕駛中視角差異的核心難題,結合強大的 DRIVE Thor 平臺,展現了未來智能駕駛的無限可能。
7:HALP:自動駕駛的“性能加速器” ?
7.1. 實時性與高精度兼得??
? ?自動駕駛需要在毫秒間處理大量傳感器數據,HALP 技術通過硬件感知剪枝,在保證模型精度的同時大幅降低計算延遲,讓車輛決策更快、更準。
7.2. 核心思想:大模型訓練 + 精簡部署?
? ?- 先訓練一個高精度的大模型,再通過硬件感知優化去除冗余參數。 ?
? ?- 最終部署到目標硬件,確保模型既輕量化又高效運行。 ?
7.3. 技術酷點?
? ?- 硬件感知優化:根據 GPU 類型(如 TITAN V、Jetson TX2 等)量身定制模型,榨干硬件性能極限。 ?
? ?- Transformer 加持:結合 Transformer 架構,提升遠近物體檢測精度,環境感知更精準。 ?
? ?- 多攝像頭融合:通過 2D-3D 轉換,實現全景式環境建模,無死角捕捉周圍世界。 ?
7.4. 實驗數據說話?
? ?- 在 NVIDIA 多款硬件平臺(TITAN V、Jetson TX2、Xavier 等)上表現碾壓競品(如 EagleEye、AutoSlim)。 ?
? ?- 推理延遲更低,精度更高,真正實現“魚與熊掌兼得”。 ?
7.5. 實際場景秀肌肉??
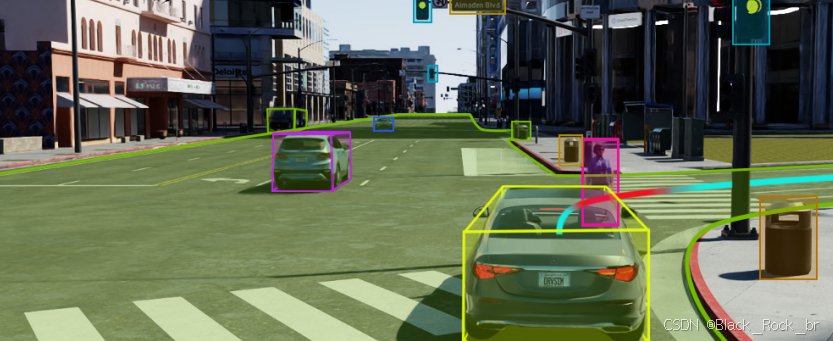
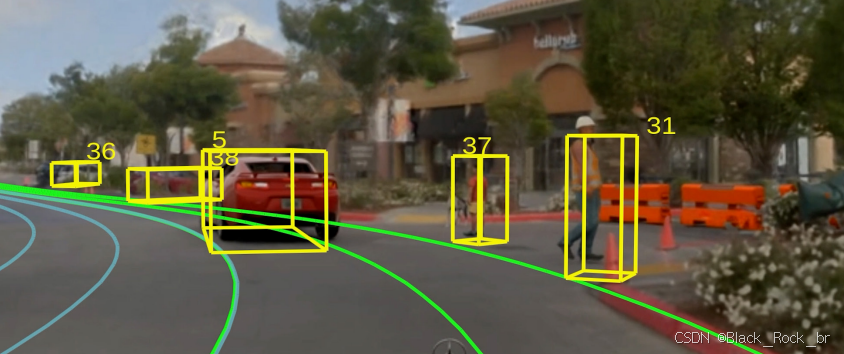
? ?- 展示了 HALP 模型在真實駕駛中的實時檢測能力,精準識別車輛、行人等目標,并生成緊密的 3D 檢測框。 ?
? ?- 已成功部署在 NVIDIA DRIVE Orin 平臺,顯著提升自動駕駛系統的實時性和可靠性。 ?
HALP 技術猶如為自動駕駛裝上了一顆“超頻大腦”,通過硬件感知剪枝和 Transformer 的雙重加持,既快又準地解析復雜路況。無論是高速行駛還是城市穿梭,HALP 都能讓車輛“眼觀六路,腦算八方”,為未來智能駕駛注入強勁動力! ?
8:NVIDIA 自動駕駛新突破:3D Occupancy 預測與 FB-OCC 技術 ?
8.1. 多攝像頭全景感知??
? ?- 借助多個車載攝像頭,覆蓋 360 度視野,將 2D 圖像轉換為統一的 3D 表征,生成鳥瞰圖(BEV)和體素化表示,構建完整的環境模型。 ?
8.2. VoxFormer:Transformer 驅動的 3D 預測??
? ?- 首個基于 Transformer 的 3D Occupancy 預測方案,通過查詢提議和掩碼標記生成語義體素,結合交叉注意力與自注意力機制,精準描繪復雜場景。 ?
8.3. FB-OCC:前后向投影黑科技??
? ?- 創新性結合深度網絡與前后向投影技術,生成高精度 3D Occupancy 預測,尤其在處理不規則物體和不平坦地面時表現卓越。 ?
8.4. 性能碾壓,國際領先??
? ?- 在 CVPR 2023 挑戰賽中,FB-OCC 模型榮登 3D Occupancy 預測排行榜第一,顯著超越其他方法。 ?
? ?- 實際場景中表現出色,精準識別可駕駛空間、車輛、行人、植被等,為自動駕駛提供可靠感知支持。 ?
8.5. 未來展望??
? ?- NVIDIA DRIVE Labs 將持續推出更多 3D Occupancy 預測方案,推動自動駕駛技術邁向新高度。 ?
NVIDIA 的 FB-OCC 技術猶如為自動駕駛裝上了一雙“透視之眼”,通過前后向投影與 Transformer 的強強聯合,徹底解鎖了 3D 空間的感知潛能。無論是復雜場景中的不規則物體,還是動態變化的路況,它都能精準捕捉、快速響應。這一技術不僅在國際競賽中傲視群雄,更為自動駕駛的未來鋪就了一條“清晰可見”的道路。 ?
9:NVIDIA 自動泊車系統(EGF):停車場中的“智能舞者”? :
9.1. 復雜環境從容應對??
? ?- EGF 系統在模擬與真實停車場場景中表現出色,輕松應對轎車、SUV、卡車等多類型車輛,以及地鎖、小孩騎玩具車等復雜障礙物。 ?
9.2. 傳感器融合黑科技??
? ?- 攝像頭與超聲波傳感器協同工作,通過 BEV(鳥瞰圖)視角,實現全方位高精度感知。魚眼攝像頭捕捉細節,超聲波精準測距,狹小車位也能游刃有余。 ?
9.3. 毫米級精準檢測?
? ?- 基于 4 厘米精度的網格圖,EGF 能精準識別障礙物輪廓,甚至能檢測到距離僅 30 厘米的小孩騎玩具車,并實時調整路徑,確保安全。 ?
9.4. 動態適應能力??
? ?- 實時監測環境變化,如地鎖升降或行人移動,動態調整泊車策略,靈活應對靜態與動態障礙物。 ?
9.5. AI 驅動自動化??
? ?- 借助深度學習與傳感器融合,EGF 自動識別車位并完成泊車,全程無需人工干預,展現強大的智能化與可靠性。 ?
NVIDIA 的 EGF 系統猶如一位“智能舞者”,在復雜停車場環境中優雅穿梭。憑借傳感器融合與 AI 技術的加持,它不僅能精準感知毫米級障礙物,還能實時調整策略,從容應對動態變化。無論是狹小車位還是復雜障礙,EGF 都能以毫秒級響應和厘米級精度完成泊車任務,重新定義了自動泊車的未來標準。
10: NVIDIA 在自動駕駛感知領域的兩大前沿技術:3D Occupancy 預測和 FB-OCC 技術
10.1. 多攝像頭超廣視野??
? ?利用多個車載攝像頭實現 360° 環視,把各角度 2D 圖像融合成精準的 3D 場景,形成上帝視角的鳥瞰圖。
10.2. VoxFormer 3D 語義革命??
? ?首個基于 Transformer 的 3D Occupancy 解決方案,通過智能注意力機制,把 3D 場景語義信息拆解重組,預測精度遠超傳統方法。
10.3. FB-OCC 的突破性投影算法??
? ?創新性地結合前后向投影技術,像給機器裝上“透視眼”,精準識別不規則物體和復雜地形,徹底革新了 3D 空間預測的精度。
10.4. 排行榜霸榜實力??
? ?FB-OCC 在 CVPR 2023 挑戰賽中直接封神,拿下 3D Occupancy 預測榜單第一,把對手遠遠甩在身后。
10.5. 實際效果炸裂??
? ?無論是車輛、行人還是植被,FB-OCC 都能瞬間鎖定可駕駛空間,給自動駕駛系統提供無死角的環境洞察。
NVIDIA 的 FB-OCC 技術,就像給自動駕駛汽車裝上了“量子雷達”,不僅能瞬間看穿復雜路況,還能精準預測每一步的可行駛區域。這技術一出,直接把自動駕駛感知領域提升到新次元,簡直是未來出行的 “空間魔法”。DRIVE Labs 的后續動作更值得期待,準備見證自動駕駛感知技術的全面進化吧!
11:NVIDIA DRIVE Labs 與 STRIPE 算法? :
11.1. DRIVE Labs 引領創新?
? ?- NVIDIA DRIVE Labs 展示了自動駕駛汽車在高速公路、城市街道等復雜場景中的卓越表現。 ?
11.2. STRIPE:模擬極端交通場景??
? ?- STRIPE 算法通過海量數據訓練,能夠生成多樣化且包含極端情況的交通場景,用于評估自動駕駛汽車在危險環境中的反應能力。 ?
11.3. 真實與模擬結合??
? ?- 利用真實行駛數據再現典型場景(如十字路口),并通過 STRIPE 修改車輛軌跡和信號燈狀態,生成多樣化的測試場景,甚至模擬潛在碰撞情況。 ?
11.4. 多視角全面分析??
? ?- 通過 Ego Car 視角和鳥瞰視角展示自動駕駛路徑及環境變化,同時生成多樣化天氣和交通條件下的測試場景。 ?
11.5. 技術深度解析??
? ?- 技術專家詳細講解了 STRIPE 的工作原理及其在自動駕駛測試中的實際應用。 ?
NVIDIA 的 STRIPE 算法猶如為自動駕駛測試裝上了一臺“時間機器”,既能重現真實場景,又能模擬極端狀況,徹底顛覆了傳統測試模式。通過真實與虛擬的無縫融合,STRIPE 不僅讓自動駕駛汽車在“實驗室”中經歷了無數極限挑戰,還大幅提升了測試的安全性和效率。這不僅是技術上的突破,更是邁向未來智能交通的一大步! ?
展望 ?
- 技術創新:STRIPE 在極端場景模擬和多樣化測試中的表現,彰顯了 NVIDIA 的技術領導力。 ?
- 實際價值:真實與模擬結合的測試方法,為自動駕駛研發提供了高效、安全的解決方案。 ?
- 未來潛力:隨著算法優化和地區適配,STRIPE 將進一步推動自動駕駛技術的普及和行業標準的提升。 ?
整體而言,這段視頻不僅展示了 NVIDIA 的技術實力,更為自動駕駛的未來發展注入了無限可能!
12:NVIDIA DRIVE Labs 與 PSA 技術 ?
12.1. DRIVE Labs 展示??
? ?- 產品經理吳紫華介紹實驗室,多輛測試車展現研發實力。 ?
12.2. PSA 技術解析??
? ?- 精準識別停車標志、交叉路口及禁止停車區域,判斷泊車帶狀態并調整路徑。 ?
? ?- 在城市街道、鐵路道口等復雜路況中表現穩定。 ?
12.3. 實際路測?
? ?- 實時感知交通標志,計算其 3D 位置并調整行駛路徑,確保安全。 ?
? ?- 數據標注展示標志識別與決策過程,凸顯精準性。 ?
12.4. 專家講解??
? ?- 深入解析 PSA 原理,強調其提升自動駕駛安全性與擴展性的重要性。 ?
NVIDIA 的 PSA 技術猶如為自動駕駛汽車裝上“火眼金睛”,毫秒級識別復雜標志與動態路況,精準應對各類挑戰。結合實際路測與模擬場景,PSA 不僅驗證了卓越性能,更為智能交通的安全性樹立新標桿,是邁向全自動駕駛的關鍵一步!
展望 ?
- 技術創新:PSA 技術突破復雜標志識別與實時決策,彰顯 NVIDIA 行業領導力。 ?
- 實際價值:多樣化場景測試證明其高效性和可靠性。 ?
- 未來潛力:優化后將進一步推動自動駕駛普及與安全性 ?
13:NVIDIA自動駕駛實驗室:用AI仿真重寫現實,以安全定義未來
當別人還在用代碼“教”車認路時,NVIDIA已讓AI直接“捏造”世界! ?
一句文本指令,MapLLM瞬間生成暴雨夜的東京十字路口;輕點鼠標,LCTGen讓NPC車輛上演“老司機式”極限博弈。Omniverse場景編輯器化身“元宇宙施工隊”,把“突發山體滑坡+失控油罐車”的地獄難度劇本變成自動駕駛訓練日常。 ?
效率炸裂:傳統團隊花3個月建模的極端場景,NVIDIA的生成式AI只需3秒——成本砍半,腦洞翻倍。 ?
安全封神:從傳感器臟污檢測到AI自動生成“幽靈剎車”測試,DRIVE Labs用物理AI+云端驗證打造六邊形戰士級安全體系。 ?
當梅賽德斯的車機開始用NVIDIA大腦思考,當捷豹路虎的底盤學會在虛擬暴風雪中漂移,這場“AI造世運動”早已突破實驗室邊界。 ?
自動駕駛的終極考場?NVIDIA直接把現實世界變成了游戲副本。
。 ?
整體而言,視頻展示了 NVIDIA 的硬核技術,為自動駕駛的未來注入無限可能!
13條技術視頻展示了nvidia最新的自動智能駕駛駕駛技術全面性和突破局限性創新未來!
四、批判性思考與未來展望??
- 技術邊界探討:極端邊緣場景(如極端惡劣天氣)的應對潛力與局限?
- 倫理與責任框架:AI決策透明性與“黑箱”問題的平衡?
- 2030愿景:Thor芯片算力躍進對L4/L5級自動駕駛的催化作用
五:結語-通向零事故交通的階梯??
- 總結:NVIDIA通過“芯片-軟件-仿真-安全”全棧創新,為行業樹立技術與倫理雙重標桿?
- 不遠未來:當自動駕駛安全成為“基礎設施”,人類出行將如何被重新定義




- KMP算法)




)







![[密碼學基礎]密碼學發展簡史:從古典藝術到量子安全的演進](http://pic.xiahunao.cn/[密碼學基礎]密碼學發展簡史:從古典藝術到量子安全的演進)

)