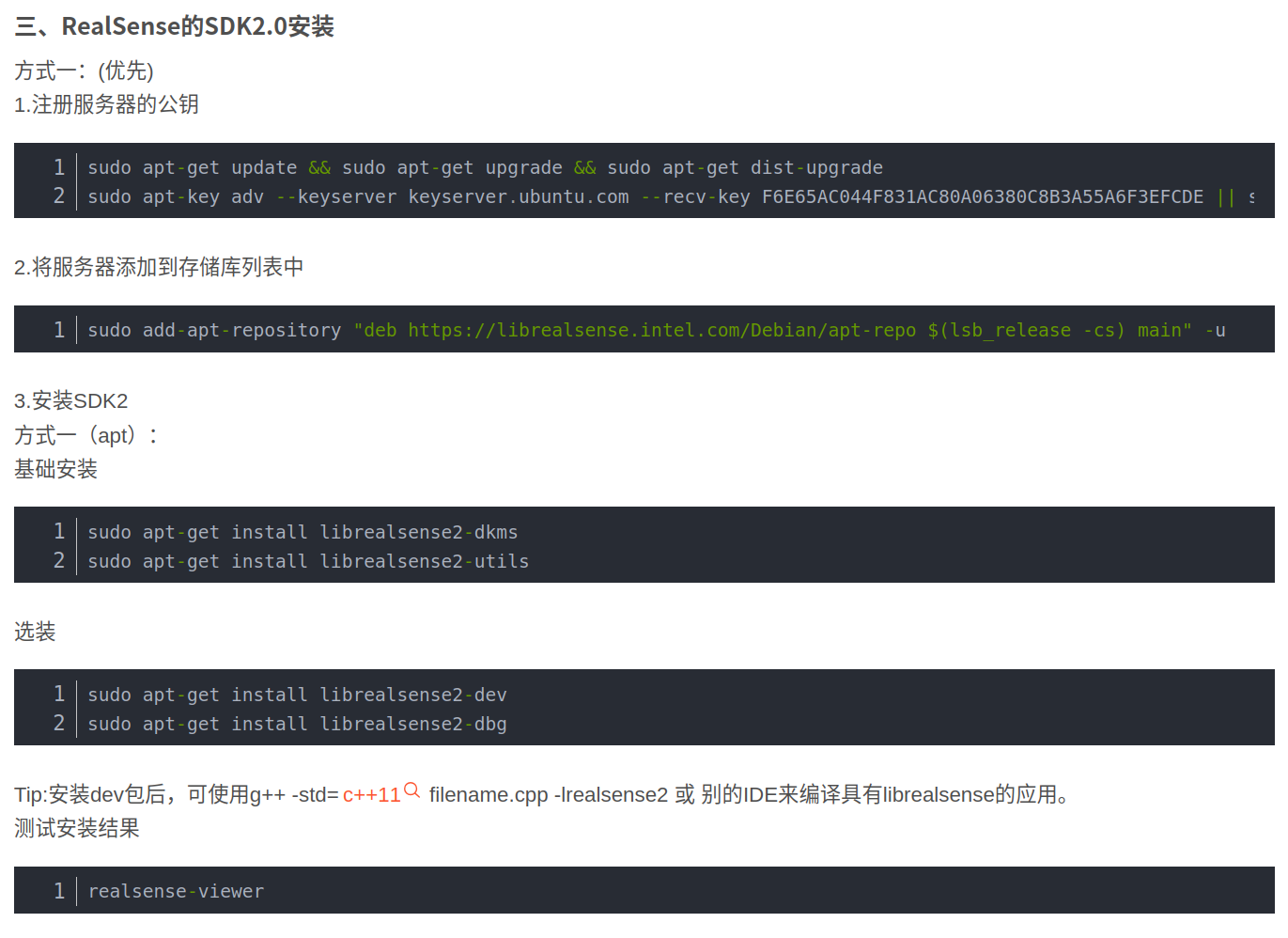
配置sdk使用
Ubuntu20.04LTS下安裝Intel Realsense D435i驅動與ROS包_realsense的驅動包-CSDN博客
中的方法一
之后不通過apt安裝包,使用官方的安裝步驟直接clone
https://github.com/IntelRealSense/realsense-ros/tree/ros1-legacy
從這一步開始
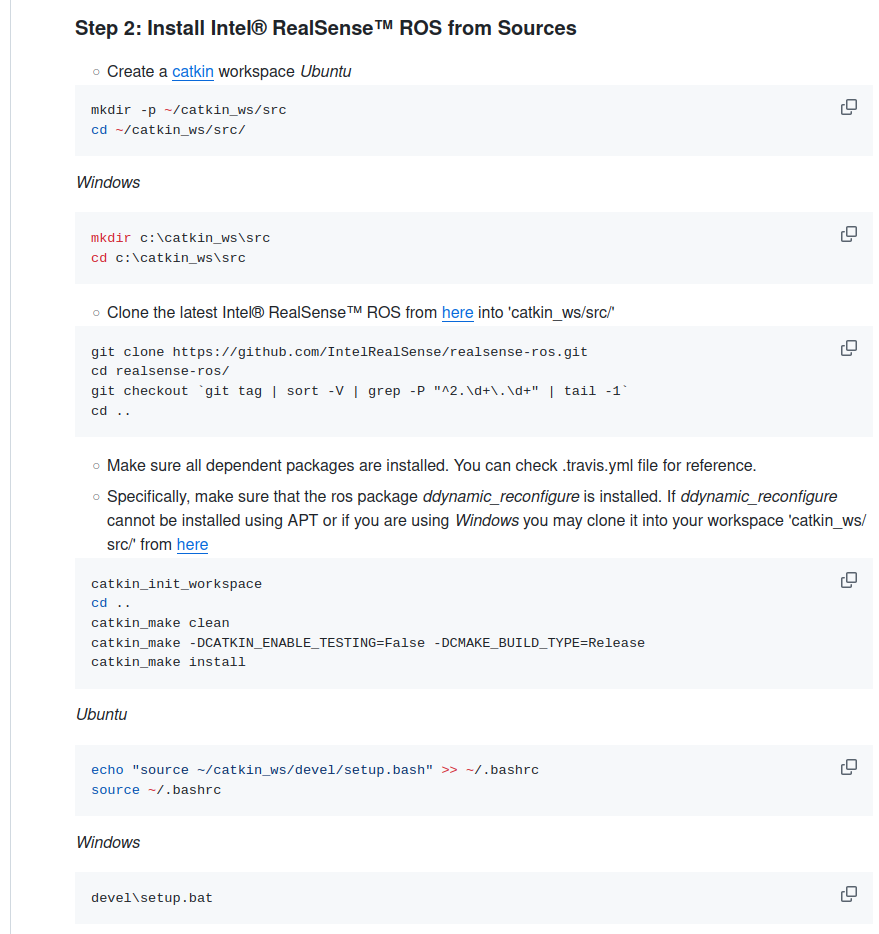
執行完

這一步后需要修改代碼,代碼位于下面終端路徑下的constants.h中修改405pid為0x0B5B
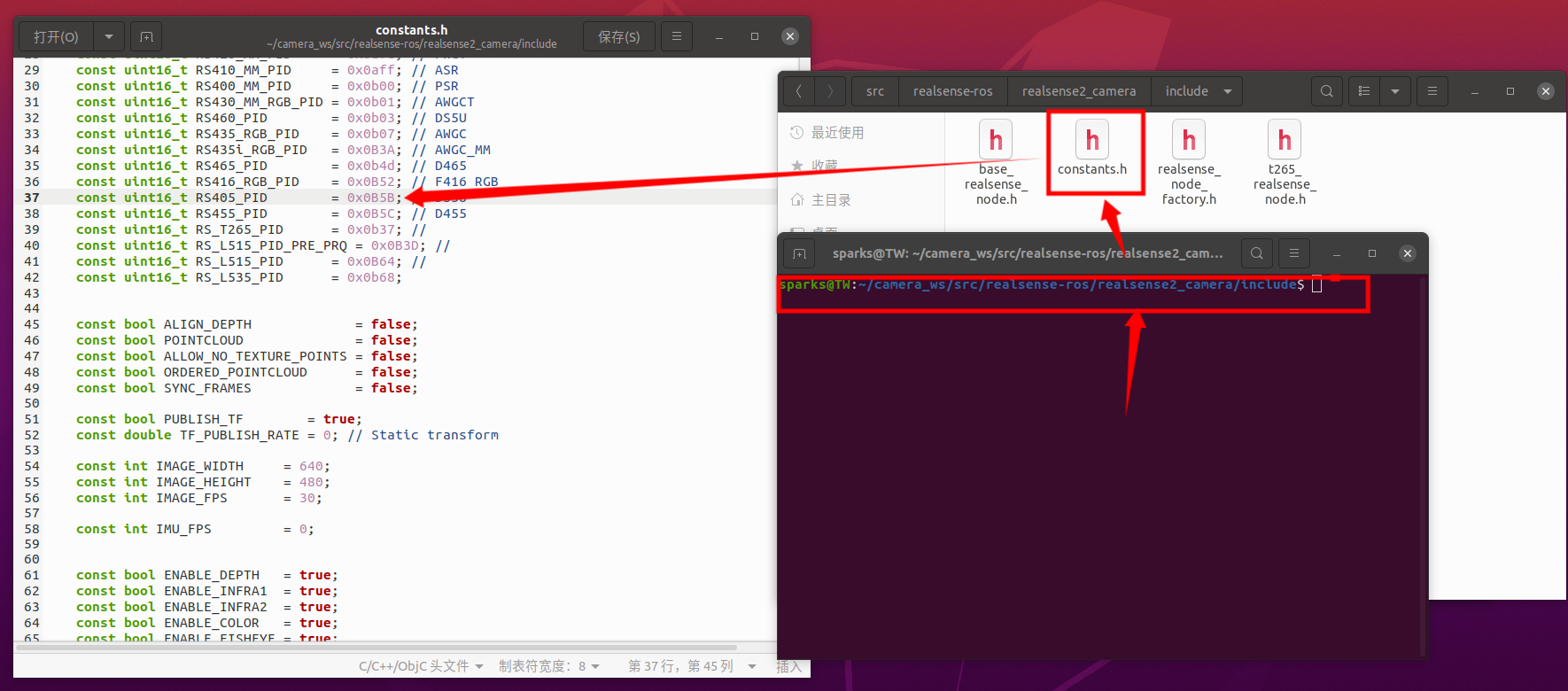
修改代碼后需要在此進行編譯
步驟如下(這里一開始是在camera_ws/src)
catkin_init_workspace
cd ..
catkin_make clean
catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
catkin_make install之后運行程序即可實現對405的ros1支持。
啟動相機節點
roslaunch realsense2_camera rs_camera.launch啟動相機并用rviz查看
roslaunch realsense2_camera demo_pointcloud.launch 雖然會有報錯,但是暫不知原因,故且認作不做影響,如果有問題會更新在這里。



)









:時鐘樹綜合——讓芯片的「心跳」同步到每個角落)



)
關于#0 問題的使用(三))
