
本文所述的程序實現三維空間中基于RSSI信號的多錨點定位,并采用容積卡爾曼濾波(CKF)對動態軌跡進行降噪優化。代碼包含完整的定位仿真流程,涵蓋環境建模、信號強度模擬、定位解算、軌跡濾波及可視化分析模塊
文章目錄
- 程序介紹
- 概述
- 主要功能
- 代碼結構
- 1. 模型初始化
- 2. 定位程序
- 3. CKF濾波部分
- 4. 結果可視化
- 結論
- 運行結果
- MATLAB代碼
程序介紹
概述
本程序實現了一種基于接收信號強度指示(RSSI)技術的三維定位方法,支持自適應數量的錨點(基站)。程序使用CKF(Cubature Kalman Filter)對目標的運動軌跡進行濾波,從而提高定位精度。
主要功能
- 初始化參數:設置RSSI測量誤差、錨節點數量及其位置,定義信號強度與距離的關系。
- 定位算法:通過RSSI測量值計算目標到各錨節點的距離,并使用最小二乘法進行位置估計。
- CKF濾波:對定位結果進行濾波,減少噪聲的影響,從而提高定位精度。
- 結果可視化:繪制目標運動軌跡、估計值、誤差曲線和RMSE對比圖,直觀展示定位效果。
代碼結構
1. 模型初始化
- 錨節點位置生成:通過正弦和余弦函數生成錨節點的三維坐標,并添加微小隨機偏移。
- 信號強度與距離關系:假設RSSI信號強度衰減模型,定義在一定距離下的信號強度。
2. 定位程序
- 距離計算:計算目標位置到各錨節點的真實距離。
- RSSI測量模擬:根據RSSI信號強度衰減模型,模擬測量值并添加噪聲。
- 位置估計:使用
rssi_localization函數通過RSSI值和錨節點位置估計目標的三維坐標。
3. CKF濾波部分
- 初始化濾波模型:設置過程噪聲和觀測噪聲的協方差矩陣,初始化狀態估計。
- 狀態更新:使用CKF算法對狀態進行預測和校正,處理非線性測量。
- 迭代計算:通過采樣生成容積點,更新狀態均值和協方差矩陣。
4. 結果可視化
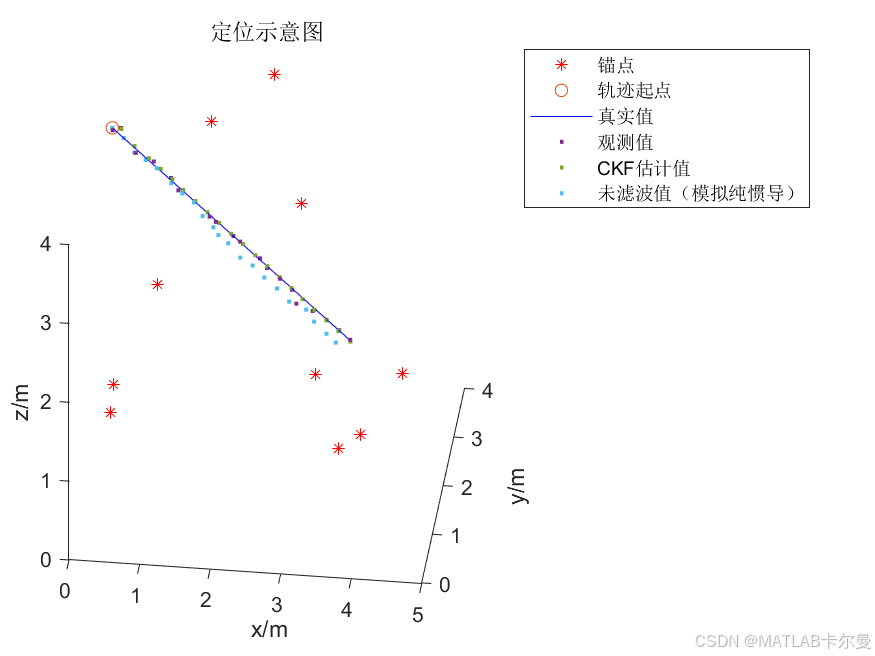
- 繪制三維軌跡圖:展示錨節點、真實軌跡、觀測值和CKF估計值。
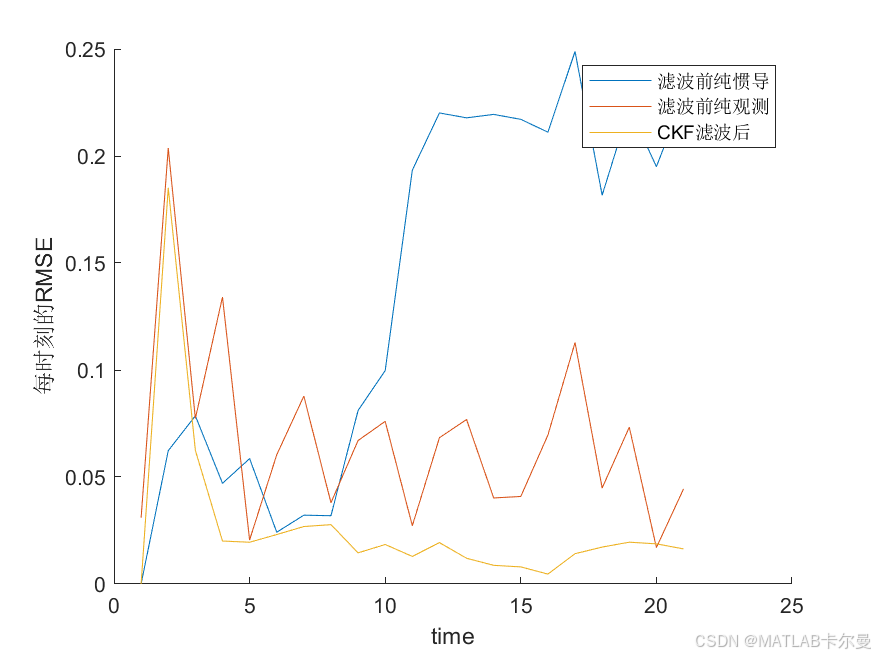
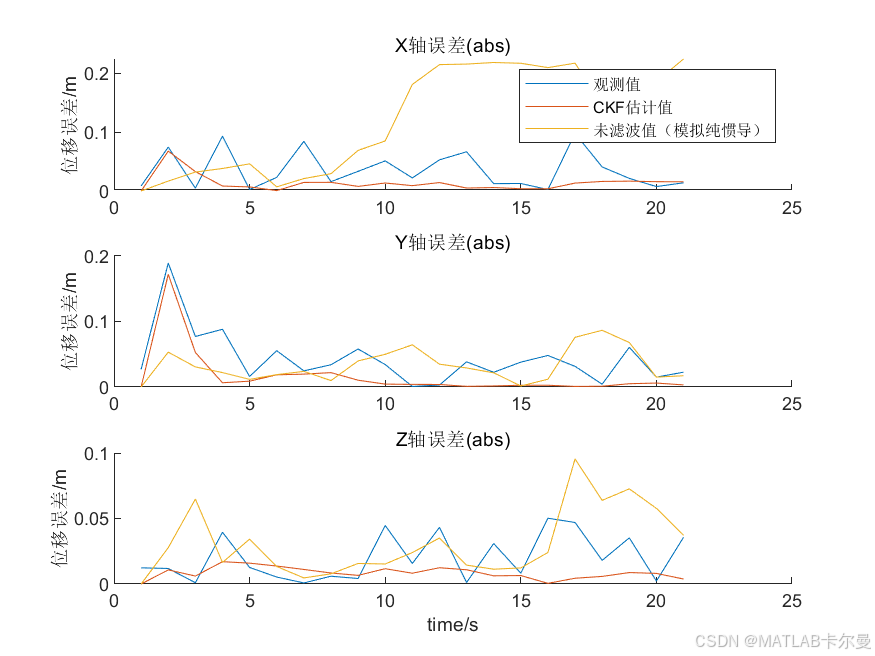
- 誤差分析:計算并繪制各軸上的位移誤差和RMSE對比,直觀展示不同方法在定位精度上的差異。
結論
該程序有效結合了RSSI定位技術與CKF濾波算法,能夠在動態環境中實現高精度的三維定位。通過模擬和可視化,展示了不同算法在定位效果上的差異,為實際應用提供了良好的基礎。
運行結果
定位示意圖:
誤差曲線和對比:
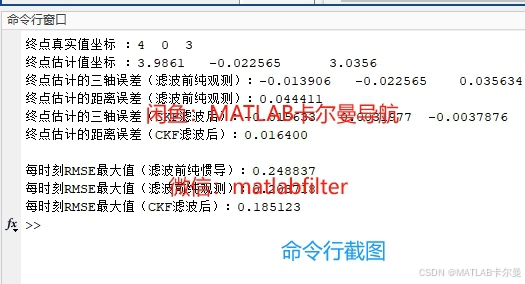
命令行輸出的結果截圖:
MATLAB代碼
% RSSI定位程序,N個錨點、三維空間,使用CKF對軌跡進行濾波
% 2025-03-29/Ver1
clear; clc; close all; % 清除工作區、命令窗口和關閉所有圖形窗口
rng(0)
%% 模型初始化
RSSI_err = 0.1; % 定義RSSI測量誤差
n = 10; %定義錨節點數量
% 定義錨節點位置 (x, y)
baseP = 2*[sin(1:n)+0.01*[1:n]+1;cos(4*(1:n))+0.01*[1:n]+1;cos(2*(1:n))+0.01*[1:n]+1]';
% 使用正弦和余弦函數生成錨節點坐標,并添加微小隨機偏移% 定義信號強度與距離的關系
% 假設信號強度衰減模型為: RSSI(d) = RSSI_0 - 10*n*log10(d)
RSSI_0 = -30; % 在1米處的信號強度
n = 2; % 衰減因子% 模擬未知點的位置
point1 = [0,4,3]; %待求點坐標真值
% 生成目標的運動
positions = repmat(point1,21,1)+[0:0.2:4;0:-0.2:-4;zeros(1,21)]';
%% 定位程序
for i1 = 1:size(positions,1)point1 = positions(i1,:);distances = sqrt(sum((baseP - point1).^2, 2)); % 計算距離RSSI_measurements = RSSI_0 - 10*n*log10(distances) + RSSI_err*randn(size(distances)); % 添加噪聲% 定位函數estimated_position(i1,:) = rssi_localization(RSSI_measurements, baseP, RSSI_0, n);
end%% 濾波模型初始化
t = 1:1:size(positions,1);% 定義時間序列
Q = 0.001*diag([1,1,1]);% 設置過程噪聲協方差矩陣
w = sqrt(Q)*randn(size(Q,1),length(t)); %生成
% 觀測噪聲協方差矩陣和觀測噪聲
R = 0.1*diag([1,1,1]);
% v = sqrt(R)*randn(size(R,1),length(t));
% 初始狀態估計協方差矩陣
P0 = 1*eye(3);
% 初始化狀態向量
X = zeros(3,length(t)); %給狀態真實值申請空間代碼下載鏈接:https://download.csdn.net/download/callmeup/90547027
如需幫助,或有導航、定位濾波相關的代碼定制需求,請點擊下方卡片聯系作者

)



)



)
![[特殊字符] 使用 Handsontable 構建一個支持 Excel 公式計算的動態表格](http://pic.xiahunao.cn/[特殊字符] 使用 Handsontable 構建一個支持 Excel 公式計算的動態表格)

的方案)
)





