文章目錄
- 前言
- 一、題目
- 二、題目分析
- 1、題目要求解析
- 2、題目方案選定
- 方案一(使用buck-boost電路+雙向DC-DC電路(前端))
- 方案二(使用同步整流Boost升壓電路+雙向DC-DC電路(前端))
- 方案三(使用同步整流Boost升壓電路+雙向DC-DC電路(后端))
- 3、控制方案選擇
- 三、理論分析與計算
- 1、效率提高的方法
- 2、優化提升點
- 3、穩壓控制方法
- 4、雙向DC-DC的Buck模式下的電感參數計算
- 5、雙向DC-DC的Boost模式下的電感參數計算
- 四、原理框圖
- 1、BOOST電路和雙向DC-DC電路
- 2、輔助電源電路
- 3、高端電流采樣電路
- 4、驅動電路
- 5、總電路
- 五、軟件思路
- 總結
前言
所有資料均免費開源到QQ群280730348,進群活躍討論討論。
博主今天想分享的是在學校期間參加2021年全國大學生電子設計競賽并獲得全國一等獎的電源方向作品-三端口DC-DC變換器,感覺時光飛逝,轉眼之間就過去了快兩年了,之前本來開源過這個作品,后因為整理資料的時候不小心把開源項目刪掉了,重新打字比較麻煩,所以一直擱置了,今天好好細說一下這個作品。
在比賽期間,博主是負責軟件調試和硬件電路設計及調試。最大的感受就是時間特別緊急,弄完硬件設計后繼續進行軟件設計,不過學校的伙食還是給的挺好的哈哈哈,及時給我補充能量。不過不建議大家一個人把硬件設計和軟件設計一起弄,還是得分工協作,到忙的時候我基本上顧不上其它事兒了,打板焊接測試基本上就交給我隊友了,幫我分擔了很多的壓力,感謝我的女朋友哈哈哈,就是我的隊友!
伙計們,咱就說打比賽是能找到女朋友的!蕪湖起飛~
話不多說直接上圖,證明一下不是亂吹的,我分享的電路都是我驗證過的!believe me
一、題目
二、題目分析
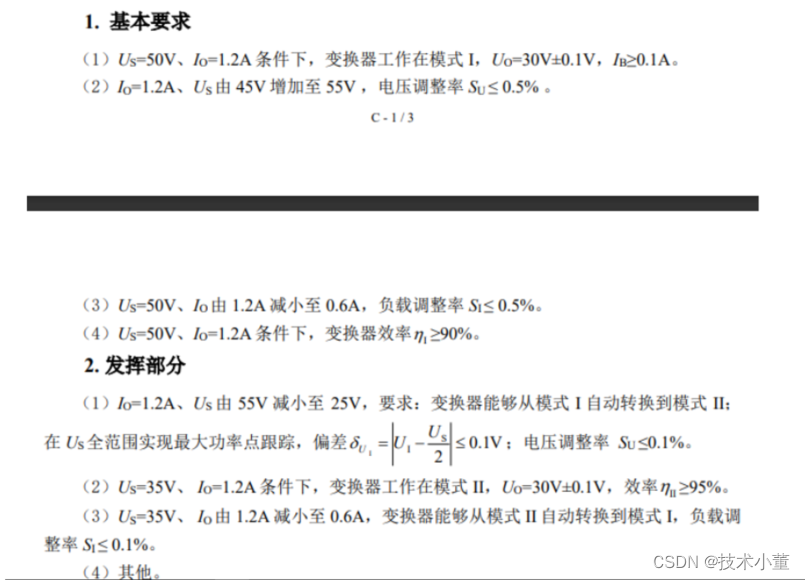
1、題目要求解析
我認為這是一道比較常規的比賽題目,相較于電源方向另外一道賽題三相PFC明顯要簡單一些,我本人由于時間問題沒能在備賽期間做出來2013年的PFC功率因數校正電路,所以當年在考慮之下就選擇了這道題目。說這道題常規就在于只有直流的變化,不需要對交流信號進行處理,因此檢測電路只需要對直流信號進行處理,包括驅動方式也是通過PWM直接進行驅動,不需要像交流信號一樣需要進行SPWM波模擬之類的。
仔細分析題目我們可以知道:
1、輸出均要穩定在30V,因此輸出要采用電壓閉環控制。
2、題目中有多項電壓電流檢測要求,故需制作直流電壓電流檢測板,其中為了檢測總電流需制作高端電流檢測板。
3、題目中要求切換工作模式,故要判斷輸入電壓的大小選擇合適的工作模式。
4、題目中要求對電池組進行充電放電,故需制作繼電器切換電路,控制工作狀態。
5、需對最大功率進行跟蹤,故利用電池組充放電使得輸出功率均衡,并利用電壓環和電流環雙環追蹤最終得到最大功率點跟蹤的結果。
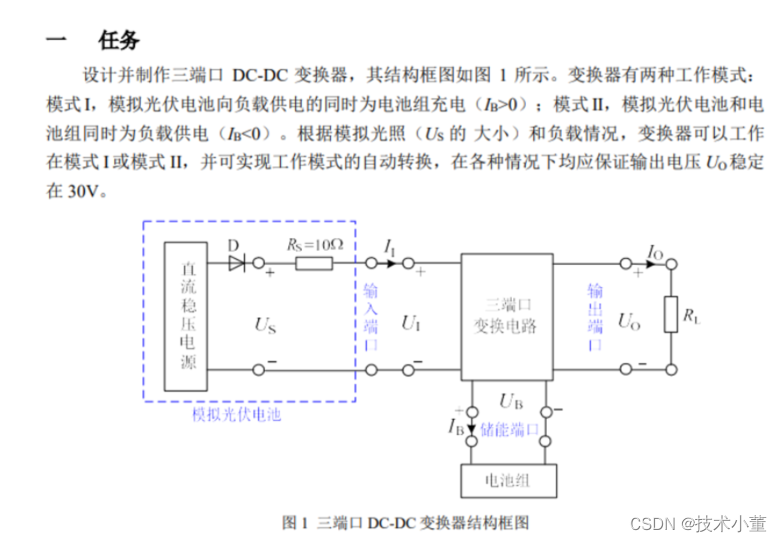
我認為其中最重要的點就是在于最大功率點跟蹤。在做比賽的第一天我犯了一個錯誤是我想要做兩個電路,一個BOOST電路,一個BUCK電路,通過繼電器來切換輸入接向BUCK或者是BOOST。會這么想的原因在于,基本要求里面提到了輸入是50V,而輸出需要穩定在30V,自然而然想到了需要用到BUCK降壓電路,使得穩定在30V的輸出。而發揮部分里面提到了US由55V減少到25V,其中25V又低于了30V的恒壓輸出,明顯要變成BOOST工作。當時的確步入思維的誤區了,覺得這電路不得有兩個?后面仔細分析題目,一拍大腿,這尼瑪有坑呀!在前面的比賽框圖中,模擬光伏電池那一坨里面還有一個電阻,雖說直流穩壓電源得調到50V輸入,但是電路供電給負載,肯定會產生電流呀,這個電流流經電阻,就會產生電壓降,比如1A電流流經10歐姆電阻,就會有10V的壓降,2A電流的話就有20V壓降,這么一想的話,要是直接電路就有個2A的電流,這變換電路前端的U1不就比UO要小了么?這輸入電壓一比輸出電壓低,不就是可以直接用BOOST電路了么?但又有一個問題來了,輸出電流才要求1.2A,這明顯電流不夠用呀,這個時候題目中其實已經隱晦的提醒我們了。
基本要求第一問里面提到了IB要大于等于0.1A。IB是什么?電池的充電電流呀。整個電路中我們不僅僅可以給負載供電,同時我們還能給電池進行供電,那么電池供電的話就可以加大我們的輸出電流,且題目里面要求電流只要大于0.1A即可,即理論上充電電流可以隨便由我們設置。那么根據這個條件,BOOST電路當占空比為0的時候輸出其實等于輸入的(當然,考慮到MOS管的續流二極管,或許會略低一點),那么根據這個條件,此時如果我們如果增大充電電流,電路整體的電流就會增加,在模擬光伏電池的電阻上壓降就會越大,因此BOOST電路的輸入電壓就會越低,在這種情況下隨著充電電流的增大,最終BOOST電路將會低于30V,故在此情況下就可以對30V輸出電壓進行追蹤。
另外由于在要求中存在電池的充放電,所以對電池進行充電或者放電需要通過一個電路來實現,這個電路就是雙向DC-DC電路。其實本質上也就是一個BOOST電路或者是BUCK電路,只取決于端口的流向。由于我們采用的是雙管結構,故雙向DC電路從左往右可視作BOOST升壓電路,從右往左又可以作為BUCK降壓電路。
2、題目方案選定
方案一(使用buck-boost電路+雙向DC-DC電路(前端))
雙向DC-DC電路接入boost-buck電路前端,光伏電池輸出直接給雙向DC-DC電路供電。充電狀態時,光伏電池通過雙向DC-DC電路降壓對電池組進行恒流充電,同時切換繼電器選擇buck或boost電路對輸出進行恒壓控制。當輸入電壓大于30V時,采用降壓拓撲。當輸入電壓小于30V時,采用升壓拓撲。放電狀態時,電池組通過雙向DC-DC電路升壓對buck-boost電路輸入端進行恒流放電。但由于充電電路放在輸入端,故存在著電壓突變,從而會引起充電電流的突變,增加電路的不穩定因素。并且buck-boost電路在繼電器切換時會存在一段真空期,效率低,容易引發電池組過流充電的情況。
方案二(使用同步整流Boost升壓電路+雙向DC-DC電路(前端))
采用Boost升壓電路輸出恒定30V。由于利用電池組對功率進行補償和跟蹤,故輸入電壓可以限制在12.5V至27.5V之間,滿足Boost升壓至30V的條件。且Boost升壓電路采用同步整流升壓拓撲,通過改變死區時長,有效提高升壓拓撲效率。本方案雖然輸入電壓限制在一個較小的區間段,但仍存在雙向DC-DC電路恒流充電時的不穩定性。
方案三(使用同步整流Boost升壓電路+雙向DC-DC電路(后端))
與方案二不同在于雙向DC-DC電路放在了輸出端,并聯至負載兩端。Boost電路對輸出進行恒壓控制的同時向電池組充放電,通過功率點跟蹤和PID控制,實現電池組對整體電路的功率補償。輸出電壓波動范圍小,提高DC-DC電路充電時的穩定性,且電池組放電時,可通過改變輸出電壓的大小,進行功率追蹤補償,增加了整個系統的安全性,能夠快速的進行最大功率點跟蹤。該拓撲結構簡單,易于硬件實現,但由于Boost升壓電路和雙向DC-DC電路均采用同步整流技術,故存在著開關瞬間強制換流的問題,控制相對復雜,電路狀態容易波動。
那么經過仔細考慮以后,最終選擇方案三進行控制方案。選擇方案三最主要的原因是,輸出電壓要穩定在30V,那么30V的這個電壓可以作為雙向DC-DC電路的輸入端進行充電,輸入電壓較穩定也容易控制對電池的充電,且在實際過程中為了減少損耗,電池充電的輸入端并不加限流的電阻,所以電壓有很大波動的話容易出現電池過流充電的現象,比賽的話還是求穩一點,平時可以瘋狂點,比賽的時候找個穩定一點的方案,比賽的時候做得很好結果最后一天炸機的例子比比皆是,電源這個東西說不準的。
3、控制方案選擇
在上面主電路拓撲結構的基礎上,存在如下幾種控制方法:
方案一:利用DSP或者ARM控制器,使用電壓環對輸出進行穩壓,電流環對電池組充放電進行恒流控制。
方案二:利用DSP或者ARM控制器,電壓環對輸出進行穩壓控制,電池組充電時利用電流環進行功率補償。電池組放電時,利用電壓環對放電電壓進行恒壓控制,以最大功率點跟蹤為目標,進行恒壓功率補償。
綜合比較,方案二能更好地實現題目中要求。
三、理論分析與計算
1、效率提高的方法
當時比賽的時候做的比較匆忙,加上考研期間斷了三個月左右,所以很多東西都沒有準備好,許多都是現場直接打板的板子,做的比較粗糙。現在回想起來,其實有很多可以優化效率改進的地方,在這里我提幾點,大家可以按照這個方向去優化。
1、屏幕選用OLED屏幕進行顯示(我用的LCD屏幕,耗電大)。
2、能用集成化的板子就用集成化的板子,我因為時間不足所有的模塊基本都是分開的,連線到處繞。
3、管子用好一點,畢竟功率電路損耗無非就是開關和導通損耗。
4、可以調整死區,盡量讓損耗的區域小一點,不過這個用處貌似不大。
5、電池組那里大膽點,我當時做的方案其實比較普通了,用個二極管切換防止電流倒灌,其實也損耗了很多充電功率,直接去掉二極管,反正有電池保護,干就完事兒了。
6、電源磚輔助電源可以換成芯片輔助供電,提高效率。
2、優化提升點
1、可以選用外置的電壓基準芯片給最小系統板的ADC參考電壓引腳供電,這樣采出來會穩定一點。
2、用好一點的運放芯片吧,把噪聲壓下來,也可以多考慮一下濾波的單元,濾除噪聲干擾采樣。
3、穩壓控制方法
根據題目要求,輸入電壓范圍為25V-55V,負載電壓在任何時刻要穩定在30V,若不采用最大功率點跟蹤,則存在輸入電壓大于或小于30V兩種狀態,故需要使用兩種拓撲電路。但考慮到兩種拓撲切換過程中存在著一段真空期,因此采用直接最大功率點跟蹤方案,拓撲選擇同步整流Boost升壓電路,通過最大功率點跟蹤將BOOST輸入電壓限制至30V以下,以實現輸出穩壓30V。
系統的穩壓能力主要體現在動態和靜態兩個方面。為提高系統的動態響應能力,可以通過提高控制器開關頻率、輸入電壓前饋檢測、控制器單位延時補償等方式提高整流器的動態響應能力。在靜態穩壓能力提高方面可以通過加入積分控制實現系統輸出無靜態誤差,消除穩態誤差。
4、雙向DC-DC的Buck模式下的電感參數計算
在Buck模式下,從電感電流連續模式(CCM)進行討論,根據電感的伏秒平衡原理,在MOS管導通和關斷狀態下可得:

5、雙向DC-DC的Boost模式下的電感參數計算

四、原理框圖
如圖所示,在本題目中光伏電池通過直流穩壓源+電阻構成,光伏電池輸出口的電壓是經過了電阻以后的降壓電壓,要讓這個電壓等于輸入的一半,才算做最大功率點。電流就是電路輸入的總電流。因此在輸入端需要通過高端電流檢測模塊檢測輸入總電流,從而判斷出壓降大小,將壓降加上此處的輸入電壓檢測以后就可以得到光伏電池的輸入電壓。后級接一個BOOST電路升壓穩定在30V,同時電池組通過雙向DC-DC電路實現電池充電和電池放電功能,繼電器的功能是為了切換充電和放電的方向,充電狀態下通過一個二極管接向電池,一定程度上限制電流,避免電池電流的陡然上升。放電狀態下切換繼電器通過電池放電,再經過雙向DC-DC電路升壓,跟BOOST電路爭奪功率,實現第二種狀態的控制。

1、BOOST電路和雙向DC-DC電路
都是同一個電路,因為BOOST電路反過來看其實就是一個BUCK電路。電路采用的是隔離式的雙向DC-DC,使用的是兩個IRF540Nmos管,并且利用同步整流控制法來控制MOS管的關斷,從左到右是Boost拓撲結構,從右到左是Buck結構,升壓時,開關管Q4為主功率元件,決定電路變比;Q3實現同步整流,替代二極管,減小導通損耗。1N4148(D7)、10Ω(R36)、10KΩ(R37)加速IRF540N的柵極、源極之間的寄生電容放電。具體怎么用的請參考我之前的文章,關于BOOST電路的詳解。

2、輔助電源電路
輔助電路用的金升陽的電源磚模塊,前文也提到了,這個地方其實是一個效率損耗點。我用的金升陽電源磚是隔離的電源,挺穩定的,用了很久都沒有出過問題,所以也就一直用了下去,當時沒有仔細去想過效率的問題。建議換成開關電源的芯片供電,供電口是在光伏電池經過電阻降壓了以后的地方取電,我記得當時題目好像有個要求是不能從輸入取來著,時代久遠忘記了,建議好好考證一下。

3、高端電流采樣電路
之前的文章也提過,用的是INA282芯片,實測電流線性度還可以。后面的運放是用的OPA2188,作用是帶你丫跟隨,降低阻抗。

4、驅動電路
BOOST電路用的光耦驅動,雙向DC-DC用的IR2104,這個其實都可以通用,當時是實在沒時間了,手頭模塊只有單獨的幾個,所以隨便選的,光耦會更保險一點。


5、總電路
如圖所示,這是根據記憶還原的圖,大致的電路結構如圖所示。VDC代表的是直流電源輸入,經過一個二極管(這個二極管是比賽要求的),再經過降壓電阻(10歐姆的大鐵殼電阻),然后流經10mΩ采樣電阻后(此處主要是采集高端直流電流),然后到達了BOOST輸入電路的前端,前端有一個V_In的檢測,就是檢測BOOST前端輸入電壓,這個電壓我們要讓他穩定在輸入電壓的一半。BOOST電路輸出后面跟著電壓檢測和電流檢測,電流檢測沒啥太多的用處,主要是電壓檢測,要穩定在30V,此處用電壓環去穩定。BOOST電路輸出端電壓為VOUT,VOUT作為雙向DC-DC的輸入端,B1是電池,這里沒有加入繼電器,實際上有繼電器的存在。就如我前文所說的一樣,我們需要切換充電和放電兩種狀態,充電狀態下VOUT通過右向左降壓給電池充電,此時L1電感的左邊應該是通過繼電器連接一個二極管再連接到B1的1號端口,放電狀態下,通過繼電器將B1的1號端口直接連接到L1的左端,相當于電池直接做了一個boost升壓到負載端口,也就是VOUT口。這樣的話既能夠保證電池充電的穩定性,有能夠保證電池放電的穩定性。

五、軟件思路
軟件中采用了最大功率點跟蹤算法,在不同的輸入電壓范圍內,實現電池組充電和放電兩種模式的切換。電池充電時,通過采集輸入電壓,輸入電流,得出輸入電壓。進入PID調節環后,以作為目標值,作為檢測值,實現實時跟蹤最大功率點。由于充電時所需能量完全由輸入提供,故輸入功率=負載功率+電池充電功率,當電池充電電流增大時,輸入電流增大,由于電壓保持不變,故會降低,輸入電流減小時,會升高,通過此類關系,通過調節PID跟蹤目標值,即可實現最大功率點的跟蹤。同樣,放電模式也是如此,電流增大時,輸入電流減小,會升高,由此來調節對應的PID,實現追蹤最大功率點。
通過設定不同的電壓范圍從而實現不同工作模式的切換,并由于硬件檢測存在著一定的誤差,因此通過軟件上面多程度的擬合加軟件濾波,增強數據檢測的可靠度。設置了校正功能,主要體現在大范圍的電壓變化而導致的輸出電壓所含紋波大小的不同,影響到輸出電壓的檢測。

總結
總結一下這個賽題,如果想要復刻,請遵循如下:
1、首先把我的基礎電路解析看了,比如我博文里面提到的采樣、基礎拓撲結構,了解的基礎上再去復現。
2、新學的建議先從兩個方向入手。第一個方向是BOOST升壓電路的設計,目標就是穩定在30V附近。第二個方向是先把15年電池雙向DC-DC電路打通,我的對電池的充放電就是按照那個來的,只不過是作為我的電路中的一部分實現的。電池充放電就按照15年國賽題來了,這道題的電池作為功率分配的部分就穩了。
3、此題核心在于功率分配,第一種狀態的時候,通過加大或者減小電池充電電流,從而實現輸出穩定30V的同時,同時向負載供電。第二種狀態的時候就是通過電池放電與BOOST電路輸出端直流并網,搶奪輸出功率,電池放電電壓越大,所占的電流就越大,因此就可以降低BOOST那邊的總電流,從而控制BOOST的輸入電壓接近光伏電池輸入電壓的一半。
4、請務必把小模塊復現好,這里面的有供電模塊、直流電壓電流檢測,電流檢測又包括高端和低端的,驅動電路、繼電器電路等等。
5、電池一定要有保護裝置,請務必小心,我這個僅代表我個人方案,有風險,謹慎復刻。
6、還可以參考西北大學的2021年這道賽題,做得很好。


在3GPP系統中的增強支持(五)-同時支持無人機和eMBB用戶數據傳輸的用例)
 --- 多樣本整合)





)






- 什么是AudioBufferProvider)


![[PaddlePaddle飛槳] PaddleSpeech-自動語音識別-小模型部署](http://pic.xiahunao.cn/[PaddlePaddle飛槳] PaddleSpeech-自動語音識別-小模型部署)