Efficient and Probabilistic Adaptive Voxel Mapping for Accurate Online LiDAR Odometry
論文地址:https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=9813516
代碼:GitHub - hku-mars/VoxelMap: [RA-L 2022] An efficient and probabilistic adaptive voxel mapping method for LiDAR odometry
視頻:https://youtu.be/HSwQdXg31WM
一、 文章概述
1. 問題導向
作為激光雷達測量的一種直接形式,點云地圖易于實現。然而,點云圖的一大缺點是難以考慮激光雷達測量噪聲引起的地圖不確定性。考慮到地圖的不確定性,需要對環境中的顯著特征(例如,平面)進行明確的參數化,在不同的激光雷達掃描中跟蹤這些特征,并估計這些特征參數及其不確定性。
2.目標
針對上述挑戰,本文提出了一種新的在線自適應體素映射方法,該方法構造不同大小的體素以適應環境結構和點密度的變化。

3.摘要
本文提出了一種高效的概率自適應體素映射激光雷達里程計方法。該地圖是體素的集合;每個體素包含一個平面特征,以實現環境的概率表示和新LiDAR掃描的準確配準。我們進一步分析了從粗到精的體素映射的需求,然后使用一種由哈希表和八叉樹組織的新的體素映射來高效地構建和更新映射。我們將所提出的體素映射應用于迭代擴展卡爾曼濾波,并構造了用于位姿估計的最大后驗概率問題。在開放的KITTI數據集上的實驗表明,與其他最先進的方法相比,我們的方法具有更高的精度和效率。在室內和非結構化環境中使用固態LiDAR和非重復掃描LiDAR進行的實驗進一步驗證了我們的映射方法對不同環境和LiDAR掃描模式的適應性(參見我們所附的視頻1)。我們的代碼和數據集在Github2上是開源的
4.貢獻
1)提出了一種自適應大小、由粗到精的體素構建方法,該方法能夠適應不同結構的環境,對激光雷達點云的稀疏性和不規則性具有較強的魯棒性。自適應體素映射以八叉樹散列數據結構組織,以提高體素構建、更新和查詢的效率。
2)真正的概率地圖表示,其中包含在體素地圖中的每個特征(即,平面)準確地考慮了由點測量噪聲和姿態估計誤差引起的不確定性。
3)在LiDAR(慣性)里程計系統中實現了所提出的映射方法,并在各種環境(結構化和非結構化)和LiDARs(多旋轉LiDARs和非傳統固態LiDARs)的真實數據集上對設計進行了充分驗證。特別是,我們的方法在Kitti數據集上比其他最先進的方法具有更好的性能。
二、方法解析
2.1 Probabilistic Plane Representation概率平面表示法
我們的體素映射在每個體素中包含一個概率特征。在不喪失通用性的前提下,由于平面特征在環境中的廣泛適用性,我們使用了平面特征,并在這一部分中給出了平面特征的不確定性模型。
由于平面特征是從其關聯點估計出來的,因此這些點上的任何噪聲都會增加平面估計的不確定性。
點噪聲源的兩個可能:
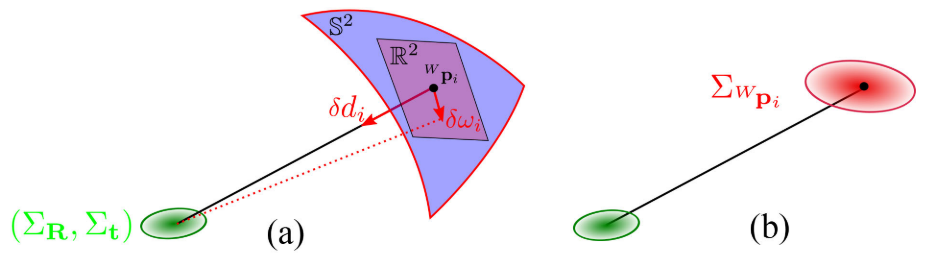
一個是相對于局部LiDAR身體框架的原點測量噪聲
另一個是將局部LiDAR點投影到世界框架的LiDAR姿態估計誤差。
(1)點的不確定性模型
LiDAR點云中點的不確定性包含兩部分:
- 測距不確定性
- 方位向不確定性兩部分組成
詳情請看。。。
?【文獻解析】Voxelmap——一種自適應體素地圖 - 古月居 (guyuehome.com)






 深入探索Python-Pandas庫的核心數據結構:Series詳解)
的交互新維度)









)
)
