任務空間運動控制簡介
任務空間運動控制—位置被指定給控制器作為末端執行器的姿態。然后,控制器驅動機器人的關節配置到使末端執行器移動到指定姿態的值。這有時被稱為操作空間控制。
任務空間運動模型表示機器人在閉環任務空間位置控制下的運動,可使用Task Space Motion Model模塊進行控制。
機器人機械手是典型的位置控制設備。要進行任務空間控制,需要在SE(3)中指定一個參考末端執行器姿態,然后模型會返回關節配置向量 q 及其狀態導數,可對機器人關節進行閉環控制,并使用運動模型模擬機器人在此控制下的動作。
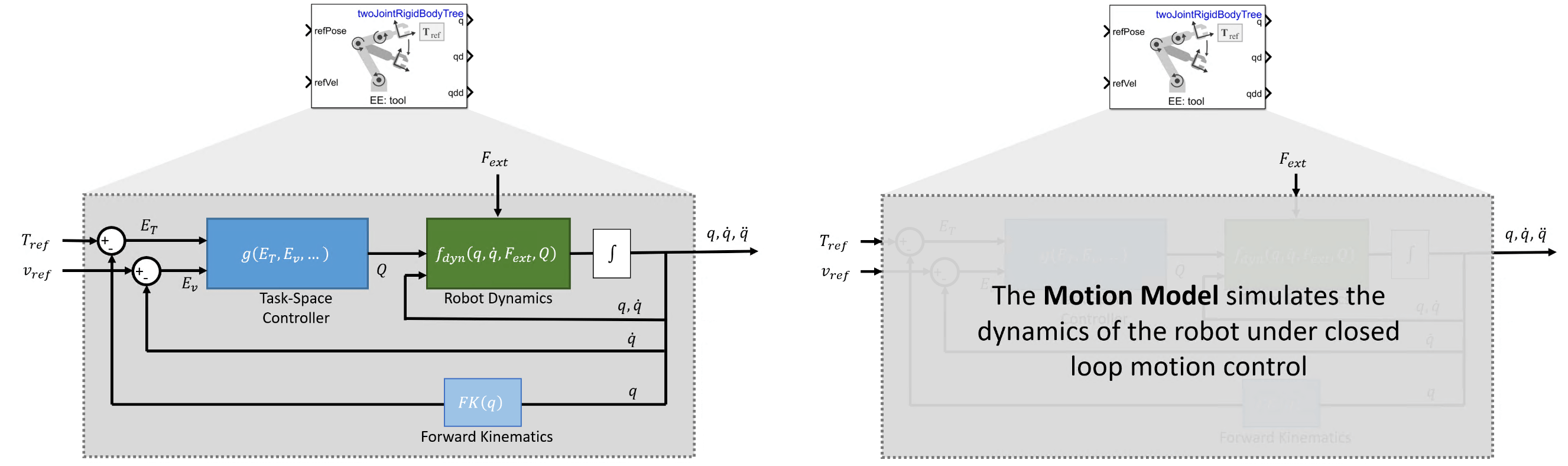
要使這種方法最接近實際系統的運動,必須準確表示控制器和被控對象的動態顯示狀態。雖然任務空間控制有很多不確定性,但Task Space Motion Model模塊使用的是相對簡單的Jacobian-Transpose方法(雅可比矩陣轉置法),當機器人和控制器的動態參數經過精調之后,該方法的控制較為精確。
關鍵變量
該模型的狀態變量有:
- q q q—機器人關節配置,作為關節位置的矢量。對于旋轉副單位為: r a d rad rad,對于平移副單位為: m m m。
- q ˙ \dot q q˙?—機器人關節速度矢量,對于旋轉副單位為: r a d / s rad/s rad/s,對于平移副單位為: m / s m/s m/s。
- q ¨ \ddot q q¨?—機器人關節加速度矢量,對于旋轉副單位為: r a d / s 2 rad/{s^2} rad/s2,對于平移副單位為: m / s 2 m/{s^2} m/s2。
機器人的末端執行器姿態 T ( q ) T(q) T(q)是一個 4 * 4 的齊次變換矩陣,相對于機器人基座的原點定義。位置單位為米。T 的兩種形式用于計算控制誤差:
- T r e f T_{ref} Tref? - 參考末端執行器位姿,指定為期望的末端執行器位姿。
- T a c t T_{act} Tact? - 實際末端執行器實際位姿末端執行器變換分解為:
$$T = \left[ {\matrix{
R & X \cr
0 & 1 \cr
} } \right]$$
R為3 * 3的旋轉矩陣,X為3 * 1的位置矩陣。
PD控制器
當運動模型使用PD控制(可使用taskSpaceMotionModel模塊)時,模型使用標準剛體動力學計算正向動力學,但受制于 PD 控制律,該控制器作用于期望姿態與實際末端執行器姿態之間的誤差。
- 輸入 - 該模型接受參考姿態 T r e f T_{ref} Tref?和參考末端執行器速度 v r e f v_{ref} vref?。
- 輸出 - 模型反饋的 q 、 q ˙ 、 q ¨ q、\dot q、\ddot q q、q˙?、q¨?即為關節的角度、速度和加速度。
- 復雜性 - 模型的復雜性描述了所需的總體計算量。這是一個中等復雜度的運動模型。它使用完整的剛體動力學,但模型中使用的控制法則相對簡單。
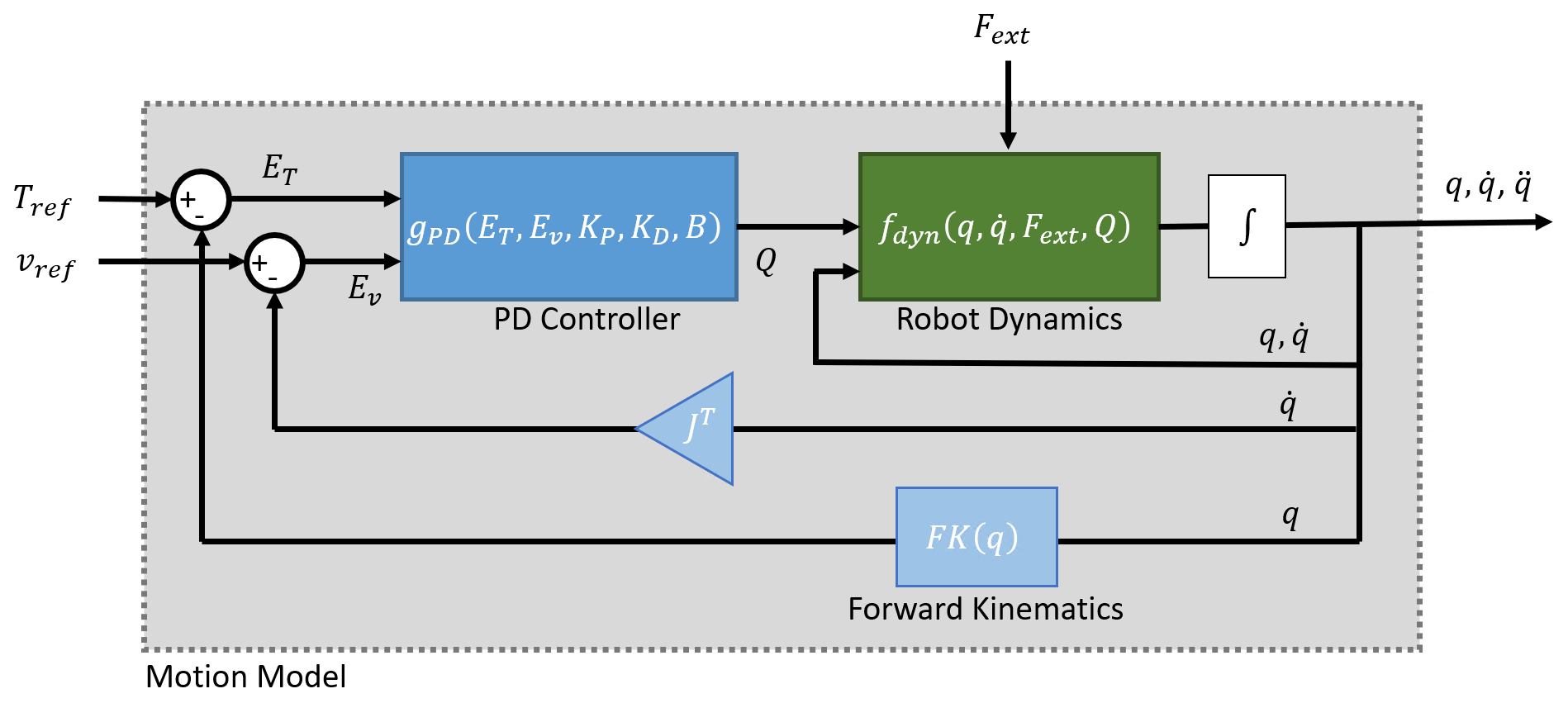
在該系統中,關節位置、速度和加速度均采用標準剛體機器人動力學計算。廣義力輸入 Q 由任務空間誤差的 PD 控制器法提供,并通過雅可比轉置法縮放至關節空間:

- e r o t e_{rot} erot? - 是使用 rotm2eul(RrefRTact) 轉換為歐拉角的旋轉誤差。
- e p o s e_{pos} epos? - 是 xyz 坐標誤差,計算公式為 X r e f ? X a c t X_{ref}-X_{act} Xref??Xact?。
- G(q) - 是所有關節在指定重力下保持其位置的重力扭矩和力。
- J(q) - 是給定關節配置的幾何雅各布系數,更多信息,請參閱幾何雅各布系數函數。
控制輸入依賴于這些用戶定義的參數:
-
KP - 比例增益,以 6×6 矩陣形式指定
-
KD - 微分增益,指定為 6 x 6 矩陣
-
B - 關節阻尼矢量,指定為雙元素阻尼常數矢量,對旋卷關節而言單位為 N?s?rad-1,對棱柱關節而言單位為 N?s?m-1
該模型輸入:
T r e f T_{ref} Tref? - 參考末端執行器姿勢,指定為所需的末端執行器姿勢
v r e f v_{ref} vref? - 參考末端執行器速度,指定為矢量

包含角速度$\omega 和平移速度 和平移速度 和平移速度{\dot X}$.
往期推薦


)
)



 變量與環境:文法結構 | 真假表達式:isZero E | let 表達式疊放 | 定義的規則 | 條件語句的使用)


macros模塊)

)


閉門峰會)



)
