歡迎收藏Star我的Machine Learning Blog:https://github.com/purepisces/Wenqing-Machine_Learning_Blog。如果收藏star, 有問題可以隨時與我交流, 謝謝大家!
邏輯回歸概述
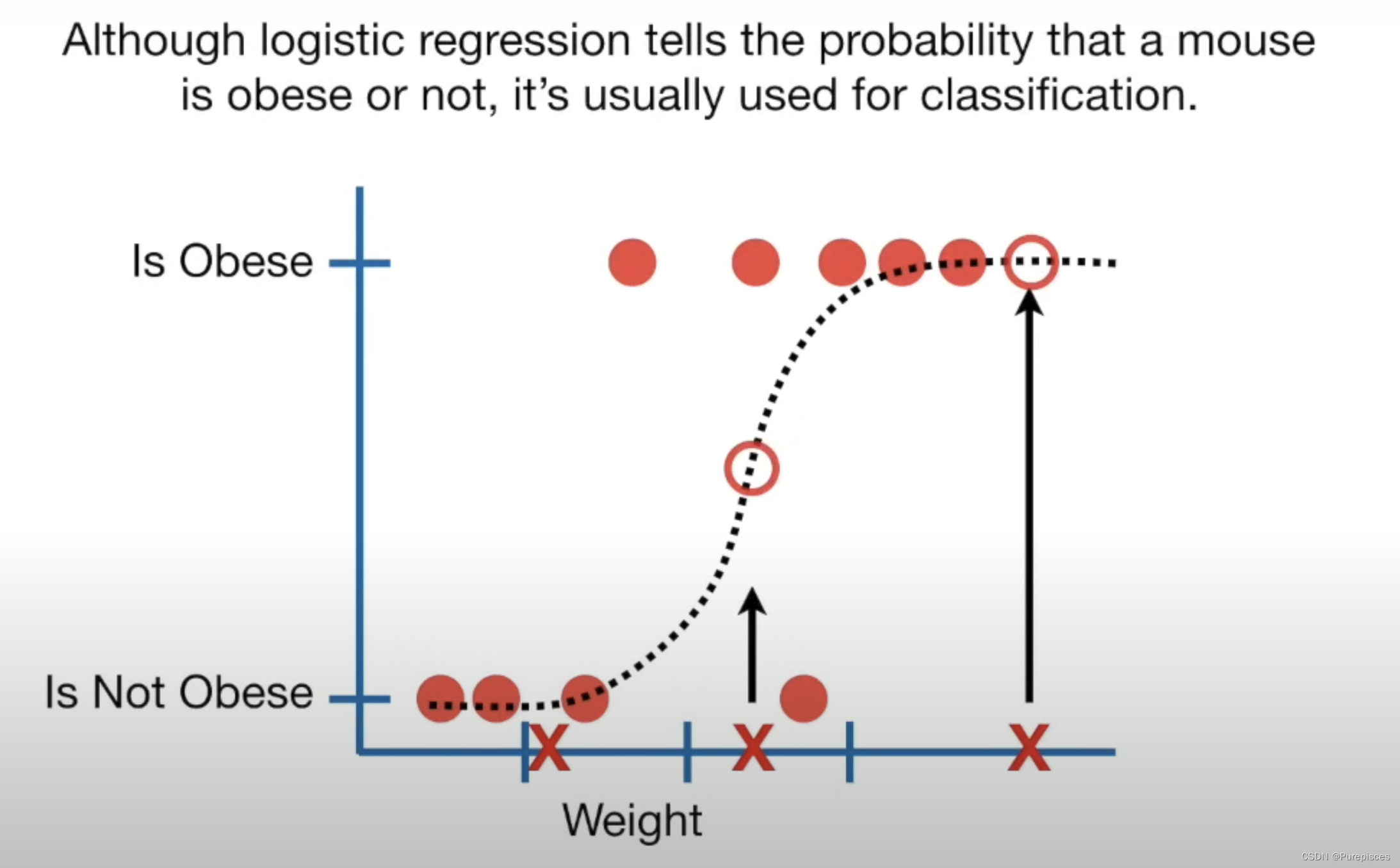
邏輯回歸類似于線性回歸,但預測的是某事物是否為真,而不是像大小這樣的連續值。邏輯回歸擬合的是“S”形的“邏輯函數”曲線,而不是一條直線。這個曲線從0到1,表示根據預測變量(例如體重),某個結果發生的概率(例如老鼠是否肥胖)。
邏輯回歸的工作原理
- 重的老鼠:高概率肥胖。
- 中等體重的老鼠:50%概率肥胖。
- 輕的老鼠:低概率肥胖。
雖然邏輯回歸給出了老鼠是否肥胖的概率,但它通常用于分類。例如,如果老鼠肥胖的概率大于50%,我們就將其分類為肥胖,否則分類為“不肥胖”。
邏輯回歸中的預測變量
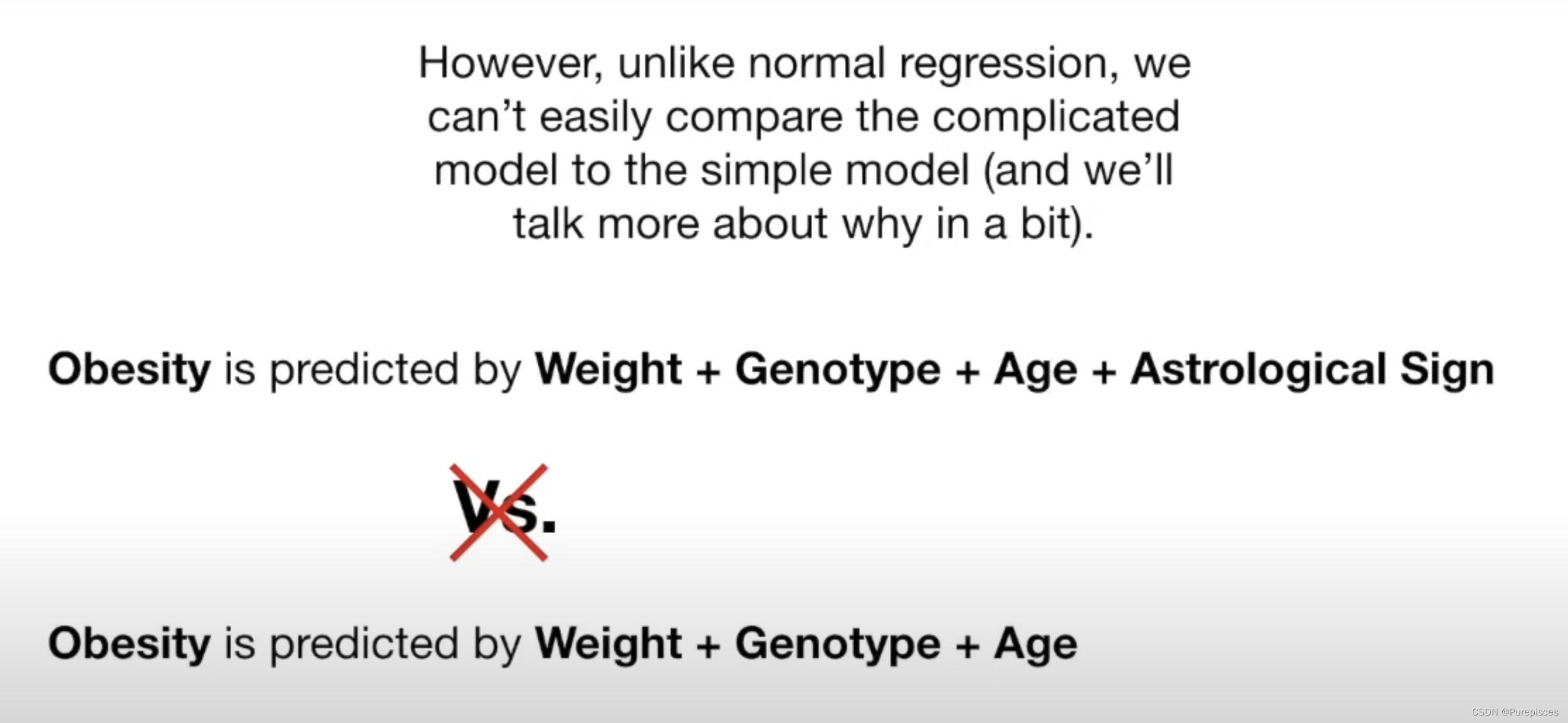
邏輯回歸可以處理連續數據(如體重、年齡)和離散數據(如基因型、星座)。我們可以測試每個變量是否對預測肥胖有用。與普通回歸不同,我們不能輕易地比較復雜模型和簡單模型。相反,我們測試一個變量對預測的影響是否顯著不同于0。如果不是,這意味著該變量對預測沒有幫助。我們使用沃爾德檢驗來確定這一點。
例如,如果肥胖是由體重+基因型+年齡+星座預測的,而我們發現星座“完全無用”(統計術語表示“沒有幫助”),我們可以從模型中排除它,以節省時間和資源。
邏輯回歸能夠提供概率并使用連續和離散測量值對新樣本進行分類,使其成為一種流行的機器學習方法。
線性回歸與邏輯回歸的區別
線性回歸和邏輯回歸的一個主要區別是數據擬合的方法:
- 線性回歸:使用“最小二乘法”擬合,最小化殘差的平方和。該方法允許計算R2來比較模型。
- 邏輯回歸:使用“最大似然法”。它沒有殘差,因此不能使用最小二乘法或計算R2。
在邏輯回歸中,您:
- 選擇一個概率,根據體重縮放,觀察肥胖老鼠的概率。
- 使用此概率計算觀察到的該體重的非肥胖老鼠的可能性。
- 然后計算觀察到該老鼠的可能性。
- 對所有老鼠重復此過程并將所有這些可能性相乘。這是給定該曲線的數據的可能性。

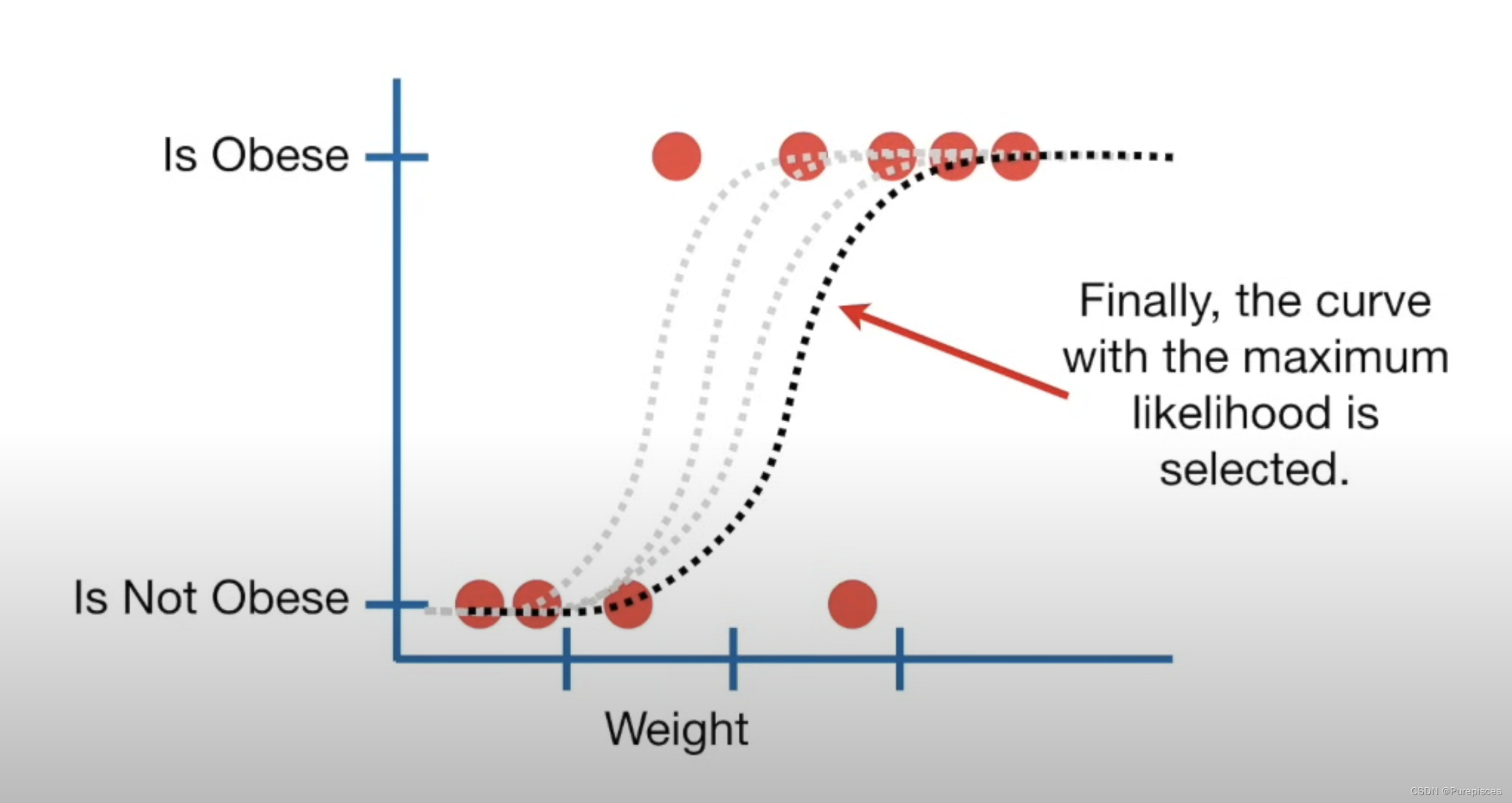
然后,您:
- 移動曲線。
- 計算新曲線的數據可能性。
- 重復此過程,直到找到最大可能性的曲線。
總結
邏輯回歸可以用于分類樣本,并且可以使用不同類型的數據(例如體重、基因型)進行分類。它還幫助評估哪些變量對分類有用(例如在使用體重、基因型、年齡和星座預測肥胖時,星座可能“完全無用”)。
關鍵概念
邏輯函數
邏輯回歸的核心是邏輯函數(也稱為S型函數),它將任何實值數映射到[0, 1]范圍內:
σ ( z ) = 1 1 + e ? z \sigma(z) = \frac{1}{1 + e^{-z}} σ(z)=1+e?z1?
這里, z z z是輸入特征的線性組合。對于二分類,邏輯函數輸出給定輸入點屬于正類的概率。
決策邊界
決策邊界是我們分類輸出的閾值。對于二分類,一個常見的閾值是0.5:
- 如果輸出概率 ≥ 0.5 \geq 0.5 ≥0.5,則分類為類別1。
- 如果輸出概率 < 0.5 < 0.5 <0.5,則分類為類別0。
模型表示
假設
在邏輯回歸中,假設定義為:
h θ ( x ) = σ ( θ T x ) h_\theta(x) = \sigma(\theta^T x) hθ?(x)=σ(θTx)
其中, θ \theta θ是權重向量, x x x是輸入特征向量, σ \sigma σ是S型函數。
代價函數
邏輯回歸的代價函數是對數損失(也稱為二元交叉熵):
J ( θ ) = ? 1 m ∑ i = 1 m [ y ( i ) log ? ( h θ ( x ( i ) ) ) + ( 1 ? y ( i ) ) log ? ( 1 ? h θ ( x ( i ) ) ) ] J(\theta) = -\frac{1}{m} \sum_{i=1}^{m} \left[ y^{(i)} \log(h_\theta(x^{(i)})) + (1 - y^{(i)}) \log(1 - h_\theta(x^{(i)})) \right] J(θ)=?m1?i=1∑m?[y(i)log(hθ?(x(i)))+(1?y(i))log(1?hθ?(x(i)))]
其中, m m m是訓練樣本的數量, y y y是實際標簽, h θ ( x ) h_\theta(x) hθ?(x)是預測概率。
優化
目標是找到使代價函數 J ( θ ) J(\theta) J(θ)最小化的參數 θ \theta θ。這通常使用梯度下降等優化算法來完成。
稀疏特征
在許多現實世界的應用中,特征空間是稀疏的,意味著大多數特征值為零。邏輯回歸在這些場景中特別有效,因為:
- 它可以高效地處理高維數據。
- 模型復雜度與特征數量線性相關,使其在計算上可行。
使用稀疏數據進行邏輯回歸時,我們通常使用稀疏矩陣表示(如壓縮稀疏行(CSR)或壓縮稀疏列(CSC)格式)來存儲輸入特征。
這些數據結構僅存儲非零元素及其索引,與密集矩陣相比顯著減少了內存使用。
邏輯回歸涉及矩陣乘法和其他線性代數操作。當數據存儲在稀疏矩陣中時,這些操作可以優化以忽略零元素,從而加快計算速度。
當使用正則化技術時,特別是L1正則化(也稱為套索正則化),邏輯回歸被認為是稀疏線性分類器。這種正則化技術可以迫使模型的一些系數正好為零,有效地忽略某些特征,從而導致稀疏模型。
該模型是線性的,因為它將對數幾率建模為輸入特征的線性組合。
log ? ( p 1 ? p ) = β 0 + β 1 x 1 + β 2 x 2 + … + β n x n \log \left( \frac{p}{1-p} \right) = \beta_0 + \beta_1 x_1 + \beta_2 x_2 + \ldots + \beta_n x_n log(1?pp?)=β0?+β1?x1?+β2?x2?+…+βn?xn?
在邏輯回歸的上下文中,“計算上可行”意味著:
訓練和預測的時間和內存需求隨著數據規模(特征和樣本數量)線性增長。
分布式訓練
為什么要分布式訓練?
隨著數據量的增加,在單臺機器上訓練模型會變得緩慢且不切實際。分布式訓練允許并行處理,使得能夠高效地處理大數據集。因此,在數據量大的情況下,我們需要使用分布式訓練:Spark中的邏輯回歸或交替方向乘子法(ADMM)。
Apache Spark
Apache Spark是一個強大的分布式數據處理工具。它可以用于在集群上的多臺機器上并行訓練邏輯回歸模型。
交替方向乘子法(ADMM)
ADMM是一種優化技術,它將問題分解為可以并行解決的較小子問題。這對于需要機器之間協調的分布式環境特別有用。
結論
邏輯回歸是一種強大且高效的二分類方法,特別適用于稀疏特征和大數據集。通過利用如Apache Spark的分布式訓練框架和ADMM等優化技術,邏輯回歸可以擴展以應對現代數據科學應用的需求。
邏輯回歸與對數幾率
概率與幾率
-
概率 §:事件發生的可能性。
-
幾率:事件發生的概率與其不發生的概率之比。
幾率 = P 1 ? P \text{幾率} = \frac{P}{1 - P} 幾率=1?PP?
對數幾率(Logit)
-
對數幾率是幾率的自然對數。
對數幾率 = log ? ( P 1 ? P ) \text{對數幾率} = \log \left( \frac{P}{1 - P} \right) 對數幾率=log(1?PP?)
邏輯回歸模型
-
在邏輯回歸中,事件發生概率的對數幾率(例如點擊的概率)被建模為輸入特征的線性組合。
-
模型方程為:
log ? ( P 1 ? P ) = θ 0 + θ 1 x 1 + θ 2 x 2 + … + θ n x n \log \left( \frac{P}{1 - P} \right) = \theta_0 + \theta_1 x_1 + \theta_2 x_2 + \ldots + \theta_n x_n log(1?PP?)=θ0?+θ1?x1?+θ2?x2?+…+θn?xn?
-
這里, θ 0 + θ 1 x 1 + θ 2 x 2 + … + θ n x n \theta_0 + \theta_1 x_1 + \theta_2 x_2 + \ldots + \theta_n x_n θ0?+θ1?x1?+θ2?x2?+…+θn?xn? 是特征的線性組合,通常表示為 z z z。
連接 ( z ) 和對數幾率
- 術語 z = θ 0 + θ 1 x 1 + θ 2 x 2 + … + θ n x n z = \theta_0 + \theta_1 x_1 + \theta_2 x_2 + \ldots + \theta_n x_n z=θ0?+θ1?x1?+θ2?x2?+…+θn?xn? 代表邏輯回歸模型中的對數幾率。盡管 z z z 本身不包含對數,它是邏輯函數的參數,將其映射到概率。
邏輯回歸中代價函數的梯度
邏輯回歸中代價函數 J ( θ ) J(\theta) J(θ) 對參數 θ \theta θ 的梯度為:
? J ( θ ) ? θ = x ( i ) ( h θ ( x ( i ) ) ? y ( i ) ) \frac{\partial J(\theta)}{\partial \theta} = x^{(i)} (h_\theta(x^{(i)}) - y^{(i)}) ?θ?J(θ)?=x(i)(hθ?(x(i))?y(i))
這個公式來自于為二分類問題的邏輯回歸代價函數導出的梯度。
推導
讓我們一步步推導這個公式。
1. 假設函數
在邏輯回歸中,假設函數 h θ ( x ) h_\theta(x) hθ?(x) 由應用于輸入特征線性組合的S型函數給出:
h θ ( x ) = σ ( θ T x ) = 1 1 + e ? θ T x h_\theta(x) = \sigma(\theta^T x) = \frac{1}{1 + e^{-\theta^T x}} hθ?(x)=σ(θTx)=1+e?θTx1?
2. 代價函數
邏輯回歸的代價函數是訓練數據的負對數似然,可以寫為:
J ( θ ) = ? 1 m ∑ i = 1 m [ y ( i ) log ? ( h θ ( x ( i ) ) ) + ( 1 ? y ( i ) ) log ? ( 1 ? h θ ( x ( i ) ) ) ] J(\theta) = -\frac{1}{m} \sum_{i=1}^{m} \left[ y^{(i)} \log(h_\theta(x^{(i)})) + (1 - y^{(i)}) \log(1 - h_\theta(x^{(i)})) \right] J(θ)=?m1?i=1∑m?[y(i)log(hθ?(x(i)))+(1?y(i))log(1?hθ?(x(i)))]
3. 簡化代價函數
為了簡便起見,我們關注于單個訓練樣本 ( x ( i ) , y ( i ) ) (x^{(i)}, y^{(i)}) (x(i),y(i)) 的代價函數:
J ( θ ) = ? [ y ( i ) log ? ( h θ ( x ( i ) ) ) + ( 1 ? y ( i ) ) log ? ( 1 ? h θ ( x ( i ) ) ) ] J(\theta) = -\left[ y^{(i)} \log(h_\theta(x^{(i)})) + (1 - y^{(i)}) \log(1 - h_\theta(x^{(i)})) \right] J(θ)=?[y(i)log(hθ?(x(i)))+(1?y(i))log(1?hθ?(x(i)))]
4. 對 θ j \theta_j θj? 的偏導數
為了找到梯度,我們需要計算 J ( θ ) J(\theta) J(θ) 對每個參數 θ j \theta_j θj? 的偏導數。我們將 z = θ T x ( i ) z = \theta^T x^{(i)} z=θTx(i),因此 h θ ( x ( i ) ) = σ ( z ) h_\theta(x^{(i)}) = \sigma(z) hθ?(x(i))=σ(z)。
代價函數 J ( θ ) J(\theta) J(θ) 對 θ j \theta_j θj? 的偏導數為:
? J ( θ ) ? θ j = ? [ ? ? θ j y ( i ) log ? ( h θ ( x ( i ) ) ) + ? ? θ j ( 1 ? y ( i ) ) log ? ( 1 ? h θ ( x ( i ) ) ) ] \frac{\partial J(\theta)}{\partial \theta_j} = -\left[ \frac{\partial}{\partial \theta_j} y^{(i)} \log(h_\theta(x^{(i)})) + \frac{\partial}{\partial \theta_j} (1 - y^{(i)}) \log(1 - h_\theta(x^{(i)})) \right] ?θj??J(θ)?=?[?θj???y(i)log(hθ?(x(i)))+?θj???(1?y(i))log(1?hθ?(x(i)))]
使用鏈式法則,我們有:
? ? θ j h θ ( x ( i ) ) = ? σ ( z ) ? z ? ? z ? θ j = σ ( z ) ( 1 ? σ ( z ) ) ? z ? θ j = h θ ( x ( i ) ) ( 1 ? h θ ( x ( i ) ) ) x j ( i ) \frac{\partial}{\partial \theta_j} h_\theta(x^{(i)}) = \frac{\partial \sigma(z)}{\partial z} \cdot \frac{\partial z}{\partial \theta_j} = \sigma(z) (1 - \sigma(z)) \frac{\partial z}{\partial \theta_j} = h_\theta(x^{(i)}) (1 - h_\theta(x^{(i)})) x_j^{(i)} ?θj???hθ?(x(i))=?z?σ(z)???θj??z?=σ(z)(1?σ(z))?θj??z?=hθ?(x(i))(1?hθ?(x(i)))xj(i)?
5. 每項的導數
現在,計算代價函數中每項的偏導數:
? ? θ j y ( i ) log ? ( h θ ( x ( i ) ) ) = y ( i ) 1 h θ ( x ( i ) ) ? h θ ( x ( i ) ) ? θ j = y ( i ) 1 h θ ( x ( i ) ) h θ ( x ( i ) ) ( 1 ? h θ ( x ( i ) ) ) x j ( i ) = y ( i ) ( 1 ? h θ ( x ( i ) ) ) x j ( i ) \frac{\partial}{\partial \theta_j} y^{(i)} \log(h_\theta(x^{(i)})) = y^{(i)} \frac{1}{h_\theta(x^{(i)})} \frac{\partial h_\theta(x^{(i)})}{\partial \theta_j} = y^{(i)} \frac{1}{h_\theta(x^{(i)})} h_\theta(x^{(i)}) (1 - h_\theta(x^{(i)})) x_j^{(i)} = y^{(i)} (1 - h_\theta(x^{(i)})) x_j^{(i)} ?θj???y(i)log(hθ?(x(i)))=y(i)hθ?(x(i))1??θj??hθ?(x(i))?=y(i)hθ?(x(i))1?hθ?(x(i))(1?hθ?(x(i)))xj(i)?=y(i)(1?hθ?(x(i)))xj(i)?
? ? θ j ( 1 ? y ( i ) ) log ? ( 1 ? h θ ( x ( i ) ) ) = ( 1 ? y ( i ) ) 1 1 ? h θ ( x ( i ) ) ? ( 1 ? h θ ( x ( i ) ) ? θ j = ( 1 ? y ( i ) ) 1 1 ? h θ ( x ( i ) ) ( ? h θ ( x ( i ) ) ) x j ( i ) = ? ( 1 ? y ( i ) ) h θ ( x ( i ) ) x j ( i ) \frac{\partial}{\partial \theta_j} (1 - y^{(i)}) \log(1 - h_\theta(x^{(i)})) = (1 - y^{(i)}) \frac{1}{1 - h_\theta(x^{(i)})} \frac{\partial (1 - h_\theta(x^{(i)})}{\partial \theta_j} = (1 - y^{(i)}) \frac{1}{1 - h_\theta(x^{(i)})} (-h_\theta(x^{(i)})) x_j^{(i)} = - (1 - y^{(i)}) h_\theta(x^{(i)}) x_j^{(i)} ?θj???(1?y(i))log(1?hθ?(x(i)))=(1?y(i))1?hθ?(x(i))1??θj??(1?hθ?(x(i))?=(1?y(i))1?hθ?(x(i))1?(?hθ?(x(i)))xj(i)?=?(1?y(i))hθ?(x(i))xj(i)?
6. 合并項
合并這些結果:
? J ( θ ) ? θ j = ? [ y ( i ) ( 1 ? h θ ( x ( i ) ) ) x j ( i ) + ( 1 ? y ( i ) ) ( ? h θ ( x ( i ) ) ) x j ( i ) ] \frac{\partial J(\theta)}{\partial \theta_j} = - \left[ y^{(i)} (1 - h_\theta(x^{(i)})) x_j^{(i)} + (1 - y^{(i)}) (- h_\theta(x^{(i)})) x_j^{(i)} \right] ?θj??J(θ)?=?[y(i)(1?hθ?(x(i)))xj(i)?+(1?y(i))(?hθ?(x(i)))xj(i)?]
? J ( θ ) ? θ j = ? [ y ( i ) x j ( i ) ? y ( i ) h θ ( x ( i ) ) ) x j ( i ) ? ( 1 ? y ( i ) ) h θ ( x ( i ) ) ) x j ( i ) ] \frac{\partial J(\theta)}{\partial \theta_j} = - \left[ y^{(i)} x_j^{(i)} - y^{(i)} h_\theta(x^{(i)})) x_j^{(i)} - (1 - y^{(i)}) h_\theta(x^{(i)})) x_j^{(i)} \right] ?θj??J(θ)?=?[y(i)xj(i)??y(i)hθ?(x(i)))xj(i)??(1?y(i))hθ?(x(i)))xj(i)?]
? J ( θ ) ? θ j = ? [ y ( i ) x j ( i ) ? h θ ( x ( i ) ) ) x j ( i ) ] \frac{\partial J(\theta)}{\partial \theta_j} = - \left[ y^{(i)} x_j^{(i)} - h_\theta(x^{(i)})) x_j^{(i)} \right] ?θj??J(θ)?=?[y(i)xj(i)??hθ?(x(i)))xj(i)?]
? J ( θ ) ? θ j = x j ( i ) ( h θ ( x ( i ) ) ? y ( i ) ) \frac{\partial J(\theta)}{\partial \theta_j} = x_j^{(i)} (h_\theta(x^{(i)}) - y^{(i)}) ?θj??J(θ)?=xj(i)?(hθ?(x(i))?y(i))
向量形式
用向量形式表達所有參數:
? θ J ( θ ) = x ( i ) ( h θ ( x ( i ) ) ? y ( i ) ) \nabla_\theta J(\theta) = x^{(i)} (h_\theta(x^{(i)}) - y^{(i)}) ?θ?J(θ)=x(i)(hθ?(x(i))?y(i))
其中:
- x ( i ) x^{(i)} x(i) 是第i個樣本的特征向量。
- h θ ( x ( i ) ) h_\theta(x^{(i)}) hθ?(x(i)) 是第i個樣本的預測概率。
- y ( i ) y^{(i)} y(i) 是第i個樣本的實際標簽。
總結
邏輯回歸中代價函數的梯度為:
? J ( θ ) ? θ = x ( i ) ( h θ ( x ( i ) ) ? y ( i ) ) \frac{\partial J(\theta)}{\partial \theta} = x^{(i)} (h_\theta(x^{(i)}) - y^{(i)}) ?θ?J(θ)?=x(i)(hθ?(x(i))?y(i))
這個梯度告訴我們如何調整模型參數 θ \theta θ 來最小化代價函數,這是梯度下降優化中訓練邏輯回歸模型的關鍵組成部分。
代碼實現
def dJ(theta, X, y, i):return np.array(X[i]) * (-y[i] + sigmoid(np.matmul(np.array(X[i]), theta)))def train(theta, X, y, num_epoch, learning_rate):for num_epoch in range(int(num_epoch)):for i in range(len(X)):theta -= float(learning_rate) * dJ(theta, X, y,i )return thetadef predict(update_theta, X):y_pred = []for i in range(len(X)):if sigmoid(np.matmul(X[i], update_theta)) >= 0.5:y_pred.append(1)else:y_pred.append(0)return y_pred
參考資料:
- 在YouTube上觀看視頻
- Alex Xu的《機器學習系統設計》












)






--LCD1602)