文章目錄
深度學習Week16——數據增強
一、前言
二、我的環境
三、前期工作
1、配置環境
2、導入數據
2.1 加載數據
2.2 配置數據集
2.3 數據可視化
四、數據增強
五、增強方式
1、將其嵌入model中
2、在Dataset數據集中進行數據增強
六、訓練模型
七、自定義增強函數
一、前言
- 🍨 本文為🔗365天深度學習訓練營 中的學習記錄博客
- 🍖 原作者:K同學啊 | 接輔導、項目定制
本篇內容分為兩個部分,前面部分是學習K同學給的算法知識點以及復現,后半部分是自己的拓展與未解決的問題
本期學習了數據增強函數并自己實現一個增強函數,使用的數據集仍然是貓狗數據集。
二、我的環境
- 電腦系統:Windows 10
- 語言環境:Python 3.8.0
- 編譯器:Pycharm2023.2.3
深度學習環境:TensorFlow
顯卡及顯存:RTX 3060 8G
三、前期工作
1、配置環境
import matplotlib.pyplot as plt
import numpy as np
#隱藏警告
import warnings
warnings.filterwarnings('ignore')from tensorflow.keras import layers
import tensorflow as tf
gpus = tf.config.list_physical_devices("GPU")if gpus:tf.config.experimental.set_memory_growth(gpus[0], True) #設置GPU顯存用量按需使用tf.config.set_visible_devices([gpus[0]],"GPU")# 打印顯卡信息,確認GPU可用
print(gpus)
輸出:
[PhysicalDevice(name='/physical_device:GPU:0', device_type='GPU')]
這一步與pytorch第一步類似,我們在寫神經網絡程序前無論是選擇pytorch還是tensorflow都應該配置好gpu環境(如果有gpu的話)
2、 導入數據
導入所有貓狗圖片數據,依次分別為訓練集圖片(train_images)、訓練集標簽(train_labels)、測試集圖片(test_images)、測試集標簽(test_labels),數據集來源于K同學啊
2.1 加載數據
data_dir = "/home/mw/input/dogcat3675/365-7-data"
img_height = 224
img_width = 224
batch_size = 32train_ds = tf.keras.preprocessing.image_dataset_from_directory(data_dir,validation_split=0.3,subset="training",seed=12,image_size=(img_height, img_width),batch_size=batch_size)
使用
image_dataset_from_directory方法將磁盤中的數據加載到tf.data.Dataset中
tf.keras.preprocessing.image_dataset_from_directory()會將文件夾中的數據加載到tf.data.Dataset中,且加載的同時會打亂數據。
- class_names
- validation_split: 0和1之間的可選浮點數,可保留一部分數據用于驗證。
- subset: training或validation之一。僅在設置validation_split時使用。
- seed: 用于shuffle和轉換的可選隨機種子。
- batch_size: 數據批次的大小。默認值:32
- image_size: 從磁盤讀取數據后將其重新調整大小。默認:(256,256)。由于管道處理的圖像批次必須具有相同的大小,因此該參數必須提供。
輸出:
Found 3400 files belonging to 2 classes.
Using 2380 files for training.
由于原始的數據集里不包含測試集,所以我們需要自己創建一個
val_batches = tf.data.experimental.cardinality(val_ds)
test_ds = val_ds.take(val_batches // 5)
val_ds = val_ds.skip(val_batches // 5)print('Number of validation batches: %d' % tf.data.experimental.cardinality(val_ds))
print('Number of test batches: %d' % tf.data.experimental.cardinality(test_ds))
Number of validation batches: 60
Number of test batches: 15
我們可以通過class_names輸出數據集的標簽。標簽將按字母順序對應于目錄名稱。
class_names = train_ds.class_names
print(class_names)
[‘cat’, ‘dog’]
2.2 配置數據集
AUTOTUNE = tf.data.AUTOTUNEdef preprocess_image(image,label):return (image/255.0,label)# 歸一化處理
train_ds = train_ds.map(preprocess_image, num_parallel_calls=AUTOTUNE)
val_ds = val_ds.map(preprocess_image, num_parallel_calls=AUTOTUNE)train_ds = train_ds.cache().shuffle(1000).prefetch(buffer_size=AUTOTUNE)
val_ds = val_ds.cache().prefetch(buffer_size=AUTOTUNE)
2.3 數據可視化
plt.figure(figsize=(15, 10)) # 圖形的寬為15高為10for images, labels in train_ds.take(1):for i in range(8):ax = plt.subplot(5, 8, i + 1) plt.imshow(images[i])plt.title(class_names[labels[i]])plt.axis("off")

四 、數據增強
使用下面兩個函數來進行數據增強:
tf.keras.layers.experimental.preprocessing.RandomFlip:水平和垂直隨機翻轉每個圖像。tf.keras.layers.experimental.preprocessing.RandomRotation:隨機旋轉每個圖像
data_augmentation = tf.keras.Sequential([tf.keras.layers.experimental.preprocessing.RandomFlip("horizontal_and_vertical"),tf.keras.layers.experimental.preprocessing.RandomRotation(0.3),
])
第一個層表示進行隨機的水平和垂直翻轉,而第二個層表示按照0.3的弧度值進行隨機旋轉。
# Add the image to a batch.
image = tf.expand_dims(images[i], 0)plt.figure(figsize=(8, 8))
for i in range(9):augmented_image = data_augmentation(image)ax = plt.subplot(3, 3, i + 1)plt.imshow(augmented_image[0])plt.axis("off")
五、增強方式
1. 將其嵌入model中
model = tf.keras.Sequential([data_augmentation,layers.Conv2D(16, 3, padding='same', activation='relu'),layers.MaxPooling2D(),layers.Conv2D(32, 3, padding='same', activation='relu'),layers.MaxPooling2D(),layers.Conv2D(64, 3, padding='same', activation='relu'),layers.MaxPooling2D(),layers.Flatten(),layers.Dense(128, activation='relu'),layers.Dense(len(class_names))
])
Epoch 1/20
43/43 [==============================] - 18s 103ms/step - loss: 1.2824 - accuracy: 0.5495 - val_loss: 0.4272 - val_accuracy: 0.8941
Epoch 2/20
43/43 [==============================] - 3s 55ms/step - loss: 0.3326 - accuracy: 0.8815 - val_loss: 0.1882 - val_accuracy: 0.9309
Epoch 3/20
43/43 [==============================] - 3s 54ms/step - loss: 0.1614 - accuracy: 0.9488 - val_loss: 0.1493 - val_accuracy: 0.9412
Epoch 4/20
43/43 [==============================] - 2s 54ms/step - loss: 0.1215 - accuracy: 0.9557 - val_loss: 0.0950 - val_accuracy: 0.9721
Epoch 5/20
43/43 [==============================] - 3s 54ms/step - loss: 0.0906 - accuracy: 0.9666 - val_loss: 0.0791 - val_accuracy: 0.9691
Epoch 6/20
43/43 [==============================] - 3s 56ms/step - loss: 0.0614 - accuracy: 0.9768 - val_loss: 0.1131 - val_accuracy: 0.9559
Epoch 7/20
43/43 [==============================] - 3s 55ms/step - loss: 0.0603 - accuracy: 0.9807 - val_loss: 0.0692 - val_accuracy: 0.9794
Epoch 8/20
43/43 [==============================] - 3s 55ms/step - loss: 0.0577 - accuracy: 0.9793 - val_loss: 0.0609 - val_accuracy: 0.9779
Epoch 9/20
43/43 [==============================] - 3s 55ms/step - loss: 0.0511 - accuracy: 0.9825 - val_loss: 0.0546 - val_accuracy: 0.9779
Epoch 10/20
43/43 [==============================] - 3s 55ms/step - loss: 0.0462 - accuracy: 0.9871 - val_loss: 0.0628 - val_accuracy: 0.9765
Epoch 11/20
43/43 [==============================] - 3s 55ms/step - loss: 0.0327 - accuracy: 0.9895 - val_loss: 0.0790 - val_accuracy: 0.9721
Epoch 12/20
43/43 [==============================] - 3s 55ms/step - loss: 0.0242 - accuracy: 0.9938 - val_loss: 0.0580 - val_accuracy: 0.9794
Epoch 13/20
43/43 [==============================] - 3s 55ms/step - loss: 0.0354 - accuracy: 0.9907 - val_loss: 0.0797 - val_accuracy: 0.9735
Epoch 14/20
43/43 [==============================] - 3s 55ms/step - loss: 0.0276 - accuracy: 0.9900 - val_loss: 0.0810 - val_accuracy: 0.9691
Epoch 15/20
43/43 [==============================] - 3s 56ms/step - loss: 0.0243 - accuracy: 0.9931 - val_loss: 0.1063 - val_accuracy: 0.9676
Epoch 16/20
43/43 [==============================] - 3s 56ms/step - loss: 0.0253 - accuracy: 0.9914 - val_loss: 0.1142 - val_accuracy: 0.9721
Epoch 17/20
43/43 [==============================] - 3s 56ms/step - loss: 0.0205 - accuracy: 0.9937 - val_loss: 0.0726 - val_accuracy: 0.9706
Epoch 18/20
43/43 [==============================] - 3s 56ms/step - loss: 0.0154 - accuracy: 0.9948 - val_loss: 0.0741 - val_accuracy: 0.9765
Epoch 19/20
43/43 [==============================] - 3s 56ms/step - loss: 0.0155 - accuracy: 0.9966 - val_loss: 0.0870 - val_accuracy: 0.9721
Epoch 20/20
43/43 [==============================] - 3s 55ms/step - loss: 0.0259 - accuracy: 0.9907 - val_loss: 0.1194 - val_accuracy: 0.9721
這樣做的好處是:
數據增強這塊的工作可以得到GPU的加速(如果你使用了GPU訓練的話)
注意:只有在模型訓練時(Model.fit)才會進行增強,在模型評估(Model.evaluate)以及預測(Model.predict)時并不會進行增強操作。
2. 在Dataset數據集中進行數據增強
batch_size = 32
AUTOTUNE = tf.data.AUTOTUNEdef prepare(ds):ds = ds.map(lambda x, y: (data_augmentation(x, training=True), y), num_parallel_calls=AUTOTUNE)return ds
model = tf.keras.Sequential([layers.Conv2D(16, 3, padding='same', activation='relu'),layers.MaxPooling2D(),layers.Conv2D(32, 3, padding='same', activation='relu'),layers.MaxPooling2D(),layers.Conv2D(64, 3, padding='same', activation='relu'),layers.MaxPooling2D(),layers.Flatten(),layers.Dense(128, activation='relu'),layers.Dense(len(class_names))
])
Epoch 1/20
75/75 [==============================] - 11s 133ms/step - loss: 0.8828 - accuracy: 0.7113 - val_loss: 0.1488 - val_accuracy: 0.9447
Epoch 2/20
75/75 [==============================] - 2s 33ms/step - loss: 0.1796 - accuracy: 0.9317 - val_loss: 0.0969 - val_accuracy: 0.9658
Epoch 3/20
75/75 [==============================] - 2s 33ms/step - loss: 0.0999 - accuracy: 0.9655 - val_loss: 0.0362 - val_accuracy: 0.9879
Epoch 4/20
75/75 [==============================] - 2s 33ms/step - loss: 0.0566 - accuracy: 0.9810 - val_loss: 0.0448 - val_accuracy: 0.9853
Epoch 5/20
75/75 [==============================] - 2s 33ms/step - loss: 0.0426 - accuracy: 0.9807 - val_loss: 0.0142 - val_accuracy: 0.9937
Epoch 6/20
75/75 [==============================] - 2s 33ms/step - loss: 0.0149 - accuracy: 0.9944 - val_loss: 0.0052 - val_accuracy: 0.9989
Epoch 7/20
75/75 [==============================] - 2s 33ms/step - loss: 0.0068 - accuracy: 0.9974 - val_loss: 7.9693e-04 - val_accuracy: 1.0000
Epoch 8/20
75/75 [==============================] - 2s 33ms/step - loss: 0.0015 - accuracy: 1.0000 - val_loss: 4.8532e-04 - val_accuracy: 1.0000
Epoch 9/20
75/75 [==============================] - 2s 33ms/step - loss: 4.5804e-04 - accuracy: 1.0000 - val_loss: 1.9160e-04 - val_accuracy: 1.0000
Epoch 10/20
75/75 [==============================] - 2s 33ms/step - loss: 1.7624e-04 - accuracy: 1.0000 - val_loss: 1.1390e-04 - val_accuracy: 1.0000
Epoch 11/20
75/75 [==============================] - 2s 33ms/step - loss: 1.1646e-04 - accuracy: 1.0000 - val_loss: 8.7005e-05 - val_accuracy: 1.0000
Epoch 12/20
75/75 [==============================] - 2s 33ms/step - loss: 9.0645e-05 - accuracy: 1.0000 - val_loss: 7.1111e-05 - val_accuracy: 1.0000
Epoch 13/20
75/75 [==============================] - 2s 33ms/step - loss: 7.4695e-05 - accuracy: 1.0000 - val_loss: 5.9888e-05 - val_accuracy: 1.0000
Epoch 14/20
75/75 [==============================] - 2s 33ms/step - loss: 6.3227e-05 - accuracy: 1.0000 - val_loss: 5.1448e-05 - val_accuracy: 1.0000
Epoch 15/20
75/75 [==============================] - 2s 33ms/step - loss: 5.4484e-05 - accuracy: 1.0000 - val_loss: 4.4721e-05 - val_accuracy: 1.0000
Epoch 16/20
75/75 [==============================] - 2s 33ms/step - loss: 4.7525e-05 - accuracy: 1.0000 - val_loss: 3.9201e-05 - val_accuracy: 1.0000
Epoch 17/20
75/75 [==============================] - 2s 33ms/step - loss: 4.1816e-05 - accuracy: 1.0000 - val_loss: 3.4528e-05 - val_accuracy: 1.0000
Epoch 18/20
75/75 [==============================] - 2s 33ms/step - loss: 3.7006e-05 - accuracy: 1.0000 - val_loss: 3.0541e-05 - val_accuracy: 1.0000
Epoch 19/20
75/75 [==============================] - 2s 33ms/step - loss: 3.2878e-05 - accuracy: 1.0000 - val_loss: 2.7116e-05 - val_accuracy: 1.0000
Epoch 20/20
75/75 [==============================] - 2s 33ms/step - loss: 2.9274e-05 - accuracy: 1.0000 - val_loss: 2.4160e-05 - val_accuracy: 1.0000
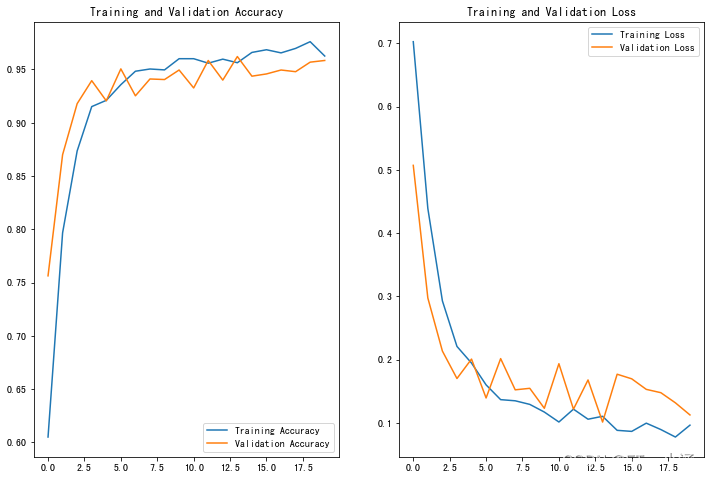
六、訓練模型
model.compile(optimizer='adam',loss=tf.keras.losses.SparseCategoricalCrossentropy(from_logits=True),metrics=['accuracy'])epochs=20
history = model.fit(train_ds,validation_data=val_ds,epochs=epochs
)
loss, acc = model.evaluate(test_ds)
print("Accuracy", acc)
使用方法一:
15/15 [==============================] - 1s 58ms/step - loss: 0.0984 - accuracy: 0.9646
Accuracy 0.9645833373069763
使用方法二:
15/15 [==============================] - 1s 58ms/step - loss: 2.7453e-05 - accuracy: 1.0000
Accuracy 1.0
七、自定義增強函數
import random
def aug_img(image):seed = random.randint(0, 10000) # 隨機種子# 隨機亮度image = tf.image.stateless_random_brightness(image, max_delta=0.2, seed=[seed, 0])# 隨機對比度image = tf.image.stateless_random_contrast(image, lower=0.8, upper=1.2, seed=[seed, 1])# 隨機飽和度image = tf.image.stateless_random_saturation(image, lower=0.8, upper=1.2, seed=[seed, 2])# 隨機色調image = tf.image.stateless_random_hue(image, max_delta=0.2, seed=[seed, 3])# 隨機翻轉水平和垂直image = tf.image.stateless_random_flip_left_right(image, seed=[seed, 4])image = tf.image.stateless_random_flip_up_down(image, seed=[seed, 5])# 隨機旋轉image = tf.image.rot90(image, k=random.randint(0, 3)) # 旋轉0, 90, 180, 270度return image
image = tf.expand_dims(images[3]*255, 0)
print("Min and max pixel values:", image.numpy().min(), image.numpy().max())
Min and max pixel values: 2.4591687 241.47968
plt.figure(figsize=(8, 8))
for i in range(9):augmented_image = aug_img(image)ax = plt.subplot(3, 3, i + 1)plt.imshow(augmented_image[0].numpy().astype("uint8"))plt.axis("off")

然后我們使用了第二種增強方法,以下為他的結果:
15/15 [==============================] - 1s 57ms/step - loss: 0.1294 - accuracy: 0.9604
Accuracy 0.9604166746139526
)
)





】)


)

:工具使用、代碼編寫、多代理群聊)



)


