機器人阻抗控制中的機械阻抗模型主要涉及到通過修改機器人與環境接觸作業的動力學模型,使其等效為一個期望的阻抗(彈簧-質量-阻尼)模型。以下是對機械阻抗模型在機器人阻抗控制中的詳細解釋:
- 阻抗控制原理:
- 機器人阻抗控制旨在通過調整機器人的行為,以維持一個由彈簧-阻尼-質量組成的二階系統的理想動態關系。
- 這種控制方法不是直接控制機器人的運動或其與外界的接觸力,而是控制這二者之間的動態關系。
- 機械阻抗模型:
- 機械阻抗模型可以理解為期望阻抗模型,它描述了機器人末端位置與接觸力之間的動態關系。
- 阻抗控制通過調節慣性、阻尼、剛度參數來實現對機器人末端位置與接觸力的關系的調整。
- 其中,剛度參數(K)決定了機器人的剛性程度,較大的剛度使機器人對外界力的響應更迅速;而阻尼參數(D)則控制機器人在受力時的能量耗散程度,較大的阻尼減小了振蕩的風險。
- 阻抗控制方法:
- 控制系統通常由內部的力閉環控制和外部的阻抗計算(位置控制)環節組成。
- 根據系統的期望運動狀態、實際運動狀態以及期望阻抗模型參數,計算出作用在機器人末端的參考力。
- 通過力控制器使機器人與環境之間的實際作用力跟蹤該期望接觸力,從而實現機器人與環境的等效模型為期望阻抗模型。
- 阻抗控制分類:
- 根據控制的空間不同,阻抗控制可分為關節空間阻抗控制和笛卡爾空間阻抗控制。
- 關節空間阻抗控制關注機器人的每個關節都體現出由彈簧-阻尼-質量組成的二階系統的動態特性。
- 笛卡爾空間阻抗控制則關注機器人末端執行器在笛卡爾空間內的每個方向上都體現出這種動態特性。
- 根據控制的空間不同,阻抗控制可分為關節空間阻抗控制和笛卡爾空間阻抗控制。
- 實現阻抗控制的要求:
- 對于關節空間阻抗控制,需要精確的機器人運動學與動力學模型、關節角及角速度反饋、關節轉矩控制以及(非必須的)外力矩的測量。
- 對于笛卡爾空間阻抗控制,還需要在線求解雅克比矩陣的(偽)逆矩陣及其導數矩陣,以及精確測量機器人執行器末端受到的外力。
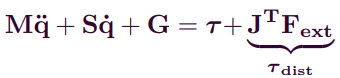
機器人動力學


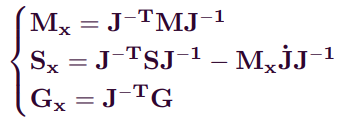
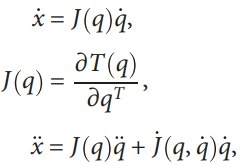
笛卡爾空間描述:
![]()
機器人與環境交互的期望阻抗模型

為了避免測量外力,將設計的慣量矩陣設置為機器人的固有慣量矩陣
![]()
![]()

把機器人末端移動至定點,然后定點調節:
![]()
因此,簡化了阻抗控制:
![]()
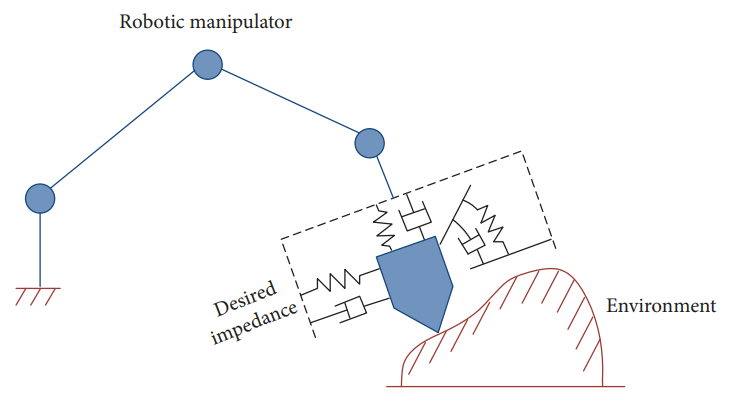
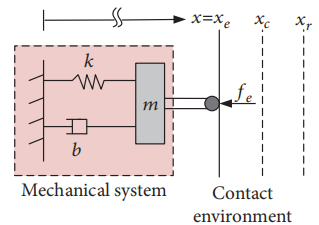
機器人與外部環境接觸的阻抗控制描述
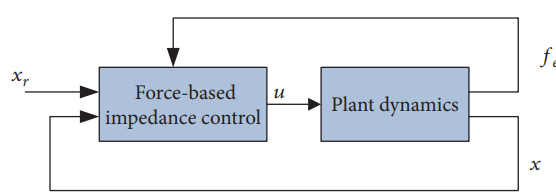
![]()
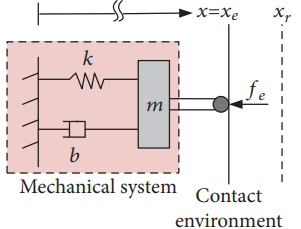
系統動力學與外部環境的接觸。坐標xe表示環境的位置,坐標xr表示在接觸環境內應稍微稍微保持接觸的參考平衡軌跡。位置誤差等于實際位置(x)和參考位置(xr)之間的差值;此誤差應保證與環境的柔順接觸
![]()
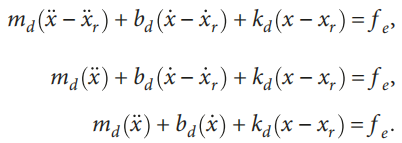
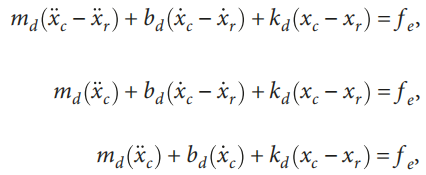
將阻抗模型帶入到機器人動力學模型中,可以求出控制律:

考慮期望質量等于機器人實際質量的情況,消去了接觸力的測量:
![]()
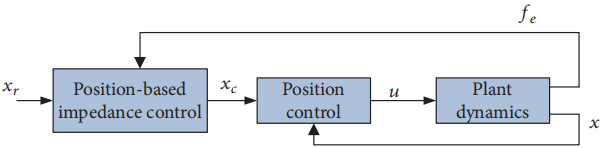
系統動力學與外部環境的接觸。由于添加了命令阻抗軌跡xc,阻抗目標動力學原理發生了變化
![]()
Active Impedance Control of Bioinspired Motion Robotic
Manipulators: An Overview
——————————————————————————————
![]()

![]()
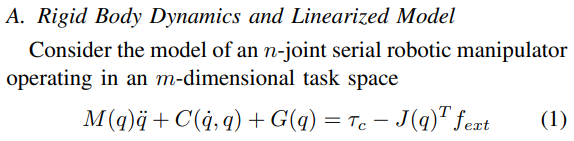
采用下面的控制律去線性化(1)
![]()
![]()
![]()
![]()
阻抗控制
![]()
![]()

)

![[數據集][目標檢測]醫療防護服檢測數據集VOC+YOLO格式649張7類別](http://pic.xiahunao.cn/[數據集][目標檢測]醫療防護服檢測數據集VOC+YOLO格式649張7類別)






?)


)





