一,CDAF反差對焦原理
CDAF,全稱Contrast Detection Auto Focus,即反差式對焦或對比度檢測自動對焦,是一種廣泛應用于入門級數碼相機和相機模塊化智能手機上的自動對焦技術。以下是關于CDAF反差對焦的詳細介紹:
工作原理
1,對比度檢測:CDAF通過計算成像中相鄰像素之間的對比度來確定焦點位置。具體來說,AF算法從圖像信號處理器(ISP)獲取統計信息FV(Focus Value),并計算出鏡頭下一次要移動的距離和方向。
2, 迭代過程:CDAF是一個反復迭代逐漸收斂的過程,類似于手動調焦的過程,即模糊-清晰-模糊,然后逐漸平衡到一個最清晰的位置。這一過程中,系統首先計算反差度,然后根據計算結果移動鏡頭、比較反差度,直到找到反差度最大的位置。
特點
1,廣泛適用性:CDAF對各種類型的鏡頭和成像情況都有較好的適應性,是目前普及率最高、使用最廣泛的自動對焦技術之一。
2,成本相對較低:由于其原理相對簡單且易于實現,CDAF在成本上具有優勢,使得它在入門級數碼相機和智能手機等設備上得到了廣泛應用。
3,光線和對比度敏感性:然而,CDAF對光線和對比度的敏感度較高。在低光環境下,由于圖像對比度降低,對焦速度可能會受到影響,變得較慢。
聚焦過程
1,聚焦點的選擇:CDAF的聚焦點是算法任意指定的,并不對應sensor上的一些特別物理構造,因此沒有數量上的限制。這使得系統可以根據圖像的特征和需要靈活選擇聚焦點。
2,近端和遠端遍歷:在聚焦過程中,CDAF算法會遍歷完近端(Near End)和遠端(Far End),即鏡頭的整個可對焦范圍,以找到最佳的焦點位置。
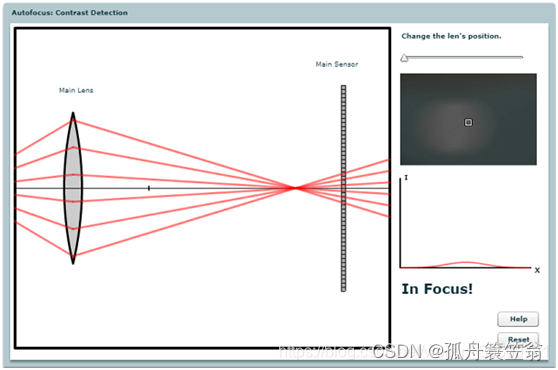 右上圖中的白色方框代表對焦點,此處反射出的紅色光線在經過鏡頭,到達傳感器前就匯聚在一點,隨后又散開,此時圖像的對比度是很低的。
右上圖中的白色方框代表對焦點,此處反射出的紅色光線在經過鏡頭,到達傳感器前就匯聚在一點,隨后又散開,此時圖像的對比度是很低的。
將這個對焦點與相鄰像素的對比度作分析得出右下角的曲線,失焦狀態下對比度低,在聚焦過程中,曲線變得逐漸變得傾斜,但是不能判斷什么時候是最高點,只有經過了對焦點后曲線下降再往回移動,反復移動后可以得到一個局部梯度最大值,就認為是對焦成功。
優點:光學設計簡單。
缺點:
a. 速度較慢,在出現失焦圖像時,機器無法判斷該移動多少,甚至往哪個方向移動鏡頭才能聚焦,甚至到了峰值也不知道,必須移動過了以后再往回移動,來回幾次后才能找到對焦點;
b. 在物體對比度較低時會對焦失敗,比如雪景,無云的藍天以及各種純色的圖像。
對比度:
對比度對視覺效果的影響非常關鍵,一般來說對比度越大,圖像越清晰醒目,色彩也越鮮明艷麗;而對比度小,則會讓整個畫面都灰蒙蒙的。

二,爬山算法原理
自動對焦爬山算法原理可以歸納為以下幾個關鍵步驟:
1,初始化:
爬山算法從一個隨機或預設的初始位置開始,這個位置代表了鏡頭的初始焦距。
2,清晰度評價:
算法首先在當前焦距下捕獲一幀圖像,并計算其清晰度評價值(Focus Value)。這個評價值通常基于圖像的對比度、邊緣清晰度等特征來計算。
3, 搜索方向確定:
算法然后以一個預定的步長沿某一方向(通常是向清晰度更高的方向)移動鏡頭,并捕獲另一幀圖像計算其清晰度評價值。
通過比較兩幀圖像的清晰度評價值,算法確定下一步的移動方向。如果新的評價值更高,說明移動方向正確,繼續沿該方向移動;否則,反轉移動方向。
4,步長調整:
隨著鏡頭逐漸接近最佳焦距(即清晰度評價值的峰值點),算法會逐步減小步長,以提高對焦精度。
5,循環迭代:
算法重復以上步驟(清晰度評價、搜索方向確定、步長調整),直到滿足聚焦精度要求或達到預設的最大迭代次數。
6,優化與改進:
傳統的爬山搜索算法分為“粗搜索”和“細搜索”兩個步驟。粗搜索采用較大步長快速搜索整個對焦區間內的清晰度評價值峰值;細搜索則是在找到峰值后,采用較小步長在峰值附近進行更精確的搜索。
爬山算法在實際應用中可能存在一些問題,如耗時較長、容易陷入局部最大值和峰值點附近震蕩等。為了解決這些問題,研究者們提出了各種優化和改進方法,如采用擬合曲線的方式預測最佳峰值點,以減少搜索時間和提高對焦精度。
總結:
自動對焦爬山算法是一種通過迭代搜索方式實現自動對焦的算法。它基于圖像的清晰度評價值來確定鏡頭的移動方向和步長,通過不斷迭代逐漸逼近最佳焦距。雖然爬山算法在自動對焦領域得到了廣泛應用,但仍存在一些挑戰和限制,需要進一步的研究和改進來提高其性能和適用性。
三,PDAF相位對焦原理
PDAF相位對焦原理可以清晰地分為以下幾個步驟進行解釋:
1,像素布局與相位差檢測:
PDAF技術是在成像傳感器的感光元件上預留出一些特殊的遮蔽像素點,這些像素點被專門設計用于相位檢測。
遮蔽像素點的設計類似于人類的雙眼,它們分別遮蓋像素點的左半邊和右半邊,從而模擬雙眼看到物體的角度差異。
這些特殊的像素對被組織成一對一的小區域,每對都包含一個用于對焦的普通像素和一個用于相位差檢測的像素。
2,相位差計算:
當光線通過鏡頭折射后,會在成像傳感器上形成干涉圖案。這些干涉圖案的相位差(PD值)可以用來計算焦點的位置。
通過比較每對像素中的光強差異,系統可以計算出相位差。相位差的大小反映了焦點與當前位置的距離:相位差越大,焦點越遠離當前位置;相位差越小,焦點越接近當前位置。
3,對焦位置確定:
利用計算出的相位差信息,系統可以確定當前鏡頭的對焦位置是否準確。
如果焦點位置不準確,系統會根據相位差的大小和方向,調整鏡頭的位置,使其向正確的方向移動。
4,算法優化:
相位差的計算和對焦位置的確定通常基于一些數學模型和算法,如互相關方法或銳度檢測方法。
這些算法可以幫助系統更準確地計算相位差,并更快速地確定對焦位置。
5, 對焦調整:
一旦系統確定了對焦位置的不準確性及其調整方向,就會控制相機鏡頭進行微調。
微調的過程會不斷重復,直到系統確定鏡頭已經移動到正確的對焦位置。
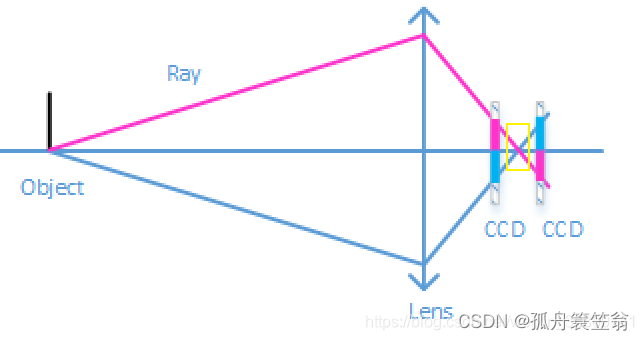
紫色光線代表經過上半部分透鏡的光線,藍色代表經過下半部分透鏡的光線,可以看到,CCD在焦前的時候上半部分的CCD接收到的是上半部分的光線,下半部分接收的是下半部分的光線,在焦后的時候,是相反的,上半部分接收的是下半部分的光線,下半部分接收的是上半部分的光線。這樣就可以通過區分光線是來自透鏡的上半部分還是下半部分,就可以知道是在焦前或者焦后了。當亮色光線重合時,圖像最清晰。
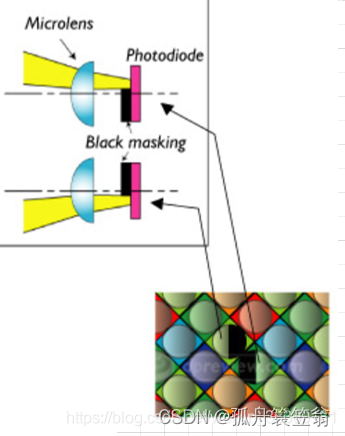
PDAF sensor的一種實現如上圖所示,在CMOS上面一半的位置加了金屬遮蓋,這樣,被遮住左邊一半的像素點就只能接受右邊來的光,同理,pair的被遮住右邊一般的像素點就只能接受左邊來的光。一般在CMOS中,遮住左邊和遮住右邊的像素點是在相鄰位置會成對出現。
遮蔽因子遮住圖像傳感器左右的兩個像素點得到他們的相位差,再通過算法結算,得到焦點位置,最后通過音圈馬達移動鏡頭的位置,完成對焦。
驗證方法
1、 將抓取PDAF log開關打開
2、 抓取log,按照mtk文檔排查,讀取confidence數據,confidence數據是一組數據,我們需要排查這組數據變化是否較大。
3、 PD線性度測試(在log里查找pdvalue與af位置,看他們是否是呈線性關系)
4、 肉眼看是否是一次性對焦到位,如果是相位對焦。如果不是反差對焦。
Type1、Type2、Type3的區別
1、 Type1:PD像素通過傳感器校正,PD值通過傳感器計算
2、 Type2:PD像素通過傳感器校正,PD像素通過vc輸出到isp
3、 Type3:PD像素通過ISP校正,PD像素通過isp從原始圖像中提取PD像素由ISP3.0上的PDAF算法提取。
Vc是傳輸raw和pd像素的兩個通道。
總結:
PDAF相位對焦技術通過利用成像傳感器上的特殊遮蔽像素點來檢測相位差,從而快速、準確地確定焦點的位置。這種技術不僅提高了對焦的速度,還提高了對焦的精度,使得數碼相機和攝像機等設備能夠更好地捕捉清晰、銳利的圖像。


)







和imutils庫實現輔助答題卡判別)




)



