文章目錄
- 1 如何測算出任一副圖片中的物體的實際尺寸
- 2 傳感器尺寸與像元尺寸的關系
- 3 Max Frame Rate最大幀率
- 4 為什么要進行相機標定?相機標定有何意義?
- 5 基于相機模型的單目測距--普通相機
1 如何測算出任一副圖片中的物體的實際尺寸
物體尺寸測量的思路是找一個確定尺寸的物體作為參照物,根據已知的計算未知物體尺寸。
實際尺寸 = (物體像素尺寸 × 物體距離)/(照片分辨率 × 傳感器尺寸 × tan(視場角/2));
D表示對角線視角,H表示水平方向視角,V表示垂直方向視角。
opencv 單目相機pnp測距(Cpp)
基于OpenCV的精度測量項目實戰
Python【OpenCV】標定后完成真實物理尺寸測量
opencv實戰—物體尺寸測量
2 傳感器尺寸與像元尺寸的關系
詳解鏈接:工業相機——靶面尺寸、像元尺寸、分辨率 、傳感器尺寸
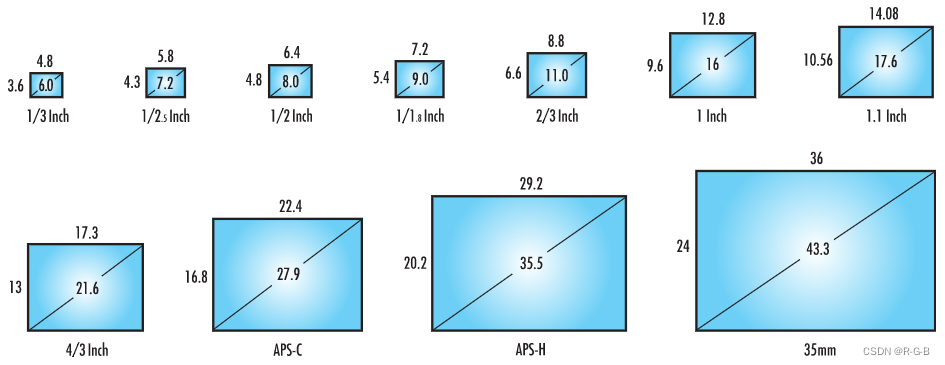
相同分辨率的工業相機,傳感器面積越大,則其單位像素的面積也越大,成像質量也會越好。同樣的500萬像素的工業相機,2/3”的傳感器成像質量就要優于1/2”的。一般來說,工業相機的靶面大小,如果要求不是太嚴格,可以直接按照公式計算。通常,像工業相機廠家會告訴你多少寸的傳感器,那么就可以直接使用16mm*X”的傳感器得到工業相機的圖像傳感器的靶面對角線長度。工業相機使用16mm代表1寸,而不是使用25mm。
例如1/2’傳感器對角線則為8mm,按照一般的傳感器的長寬比為4:3的話,那么就對應勾股定理,1/2’的傳感器長寬分辨率為6.4mm、4.8mm。其實廠家也會告訴你像元的大小以及分辨率,同樣可以計算傳感器的靶面大小。如某相機的分辨率為2588 * 1940的500萬像素,像元大小為2.2um,則其傳感器的尺寸 長方向為2588 * 2.2=5694um=5.694mm,寬方向為1940 * 2.2=4268um=4.268mm,即為1/2.5”的傳感器。如今大多數傳感器像素的形狀是正方形的,如果是矩形的話,需要分別使用像素長分辨率的長、像素寬分辨率的寬即可。
Optical Format光學尺寸
光學尺寸越大,則成像系統的尺寸越大,捕獲的光子越多,感光性能越好,信噪比越低。目前CMOS圖像傳感器的常見尺寸有1、2/3、1/2、1/3、1/4英寸等。
Pixel Size像素尺寸
芯片像元陣列上的每個像素的實際物理尺寸,通常的尺寸包括14um、10um、9um、7um、6.45um、3.75um、3.0um、2.0um、1.75um、1.4um、1.2um、1.0um等。像元尺寸從某種程度上反映了芯片的對光的響應能力,像元尺寸越大,能夠接收到的光子數量越多,在同樣的光照條件和曝光時間內產生的電荷數量越多。對于弱光成像而言,像元尺寸是芯片靈敏度的一種表征。
3 Max Frame Rate最大幀率
幀率指的是單位時間所記錄或者播放的圖片的數量,連續播放一系列圖片就會產生動畫效果,根據人類的視覺系統,當圖片的播放速度大于15幅/秒的時候,人眼就基本看不出來圖片的跳躍。在達到24幅/s~30幅/s時就已經基本覺察不到閃爍現象了。每秒的幀數或者幀率表示CMOS圖像傳感器在處理圖像時每秒鐘能夠更新的次數。高的幀率可以得到更流暢、更逼真的視覺體驗。
4 為什么要進行相機標定?相機標定有何意義?
為什么要進行相機標定?相機標定有何意義?
5 基于相機模型的單目測距–普通相機
基于相機模型的單目測距–普通相機
下面是關于這幾個坐標系的轉換。** 敘述思路從像素坐標系一步一步轉換到世界坐標系,意味著如何從一個像素點獲得世界坐標系的坐標點,從而可以進行實際距離測量 **。

?)

















)