1. 引言:Excel 的“一鍵魔法”背后藏著什么智慧?
在 Excel 中,我們只需右鍵 → 添加趨勢線,一條完美的直線就出現了。它快得像魔法,但魔法背后,是數學的嚴謹。
今天,我們不關心 Excel 內部用了什么算法(可能是解析法),而是要問:
如果機器一開始‘什么都不知道’,它該怎么一步步‘學會’畫出這條線?
2. 我們的任務:預測一個簡單的線性關系
假設我們有一組數據,它們大致遵循 y = 2x + 1 的規律,但有一些隨機噪聲(模擬真實世界的測量誤差)。
我們的目標:僅憑這10個數據點,讓機器“學會”這個規律,找到最佳的 a(斜率)和 b(截距)。
3. 準備數據:10 個“玩具”樣本
我們用 Python 生成這10個數據點:
import numpy as np
import matplotlib.pyplot as plt# 設置隨機種子,保證結果可復現
np.random.seed(42)# 生成 10 個 x 值,從 1 到 10
x = np.arange(1, 11) # [1, 2, 3, ..., 10]# 生成 y 值:y = 2x + 1 + 噪聲
true_a, true_b = 2, 1
noise = np.random.normal(0, 0.5, size=x.shape) # 添加標準差為 0.5 的高斯噪聲
y = true_a * x + true_b + noise# 查看數據
print("x:", x)
print("y:", np.round(y, 2)) # 保留兩位小數輸出:
x: [ 1 2 3 4 5 6 7 8 9 10]
y: [ 3.25 4.93 7.32 9.76 10.88 12.88 15.79 17.38 18.77 21.27]關鍵點:真實規律是
y = 2x + 1,但數據有噪聲,所以 y 值不完全精確。
4. 可視化:我們的目標是什么?
讓我們畫出這些數據點,并標出真實的線(y=2x+1):
plt.figure(figsize=(8, 6))
plt.scatter(x, y, color='blue', label='真實數據點', s=50)
# 畫出真實規律的線
x_line = np.linspace(0, 11, 100)
y_line = true_a * x_line + true_b
plt.plot(x_line, y_line, 'g--', label=f'真實規律 y={true_a}x+{true_b}', linewidth=2)plt.xlabel('x')
plt.ylabel('y')
plt.title('我們的“學習”任務:根據10個數據點,找到最佳擬合線')
plt.legend()
plt.grid(True, alpha=0.3)
plt.show()
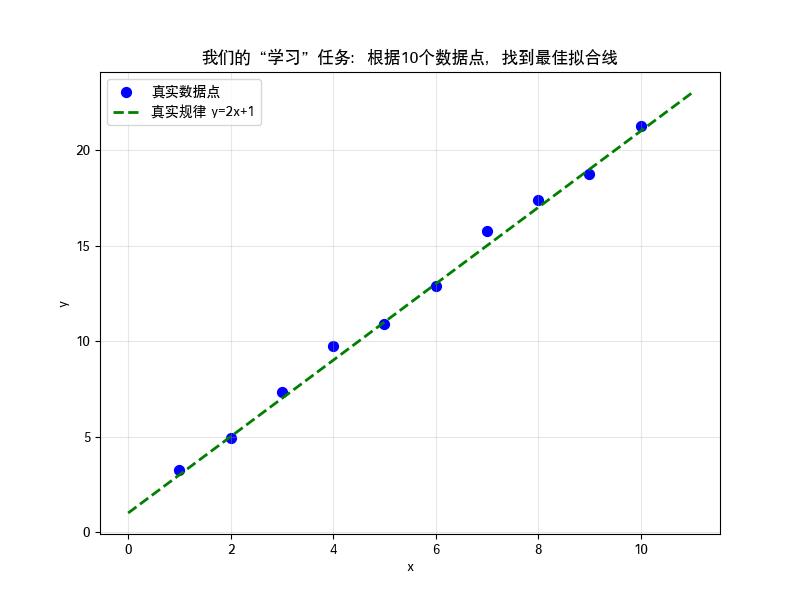
我們的任務就是:僅從這些藍色散點,讓機器找到一條最接近綠色虛線的直線。
5. 模型定義:y_pred = a * x + b
我們假設模型的形式是:
y_pred = a * x + ba:斜率(slope)b:截距(intercept)- 初始時,我們不知道?
a?和?b?是多少,可以先猜一個值,比如?a=0, b=0。
6. 損失函數:我們“錯”了多少?
我們需要一個“尺子”來衡量預測的好壞。用均方誤差 (MSE):
MSE = (1/n) * Σ(y - y_pred)2代碼實現:
def compute_mse(y_true, y_pred):return np.mean((y_true - y_pred) ** 2)# 初始猜測:a=0, b=0
a, b = 0.0, 0.0
y_pred_initial = a * x + b
initial_loss = compute_mse(y, y_pred_initial)
print(f"初始損失 (a=0, b=0): {initial_loss:.3f}")
初始損失 (a=0, b=0): 182.431解釋:損失很大,因為
y_pred全是 0,和真實 y 差很遠。
7. 核心:梯度下降——如何“學習”?
現在,我們教模型如何“學習”:
比喻:你在濃霧中的山坡上,想找到谷底(損失最小的地方)。你看不見路,但能感覺到腳下的坡度(梯度)。你每次都向坡度最陡的下坡方向走一步(更新參數),一步步接近谷底。
數學計算(對
a和b求偏導):?MSE/?a = (2/n) * Σ((a*x + b - y) * x)?MSE/?b = (2/n) * Σ(a*x + b - y)
更新規則:
a = a - learning_rate * ?MSE/?ab = b - learning_rate * ?MSE/?b
8. 動手實現:手動訓練模型
# 超參數
learning_rate = 0.01 # 學習率,步長
epochs = 10000 # 訓練輪數# 初始化參數
a, b = 0.0, 0.0# 記錄歷史,用于畫圖
loss_history = []
a_history = []
b_history = []for i in range(epochs):# 前向:計算預測值y_pred = a * x + b# 計算損失loss = compute_mse(y, y_pred)loss_history.append(loss)a_history.append(a)b_history.append(b)# 計算梯度n = len(x)da = (2 / n) * np.sum((y_pred - y) * x) # 注意:y_pred - ydb = (2 / n) * np.sum(y_pred - y)# 更新參數a = a - learning_rate * dab = b - learning_rate * db# 打印進度if (i+1) % 1000 == 0:print(f"第 {i+1} 輪: a={a:.3f}, b={b:.3f}, 損失={loss:.3f}")print(f"\n訓練完成!")
print(f"我們的模型找到: a ≈ {a:.3f}, b ≈ {b:.3f}")
print(f"真實規律是: a = {true_a}, b = {true_b}")輸出:
第 100 輪: a=2.054, b=0.840, 損失=0.153
第 200 輪: a=2.021, b=1.070, 損失=0.124
第 300 輪: a=2.007, b=1.168, 損失=0.119
第 400 輪: a=2.001, b=1.211, 損失=0.118
第 500 輪: a=1.999, b=1.229, 損失=0.118
第 600 輪: a=1.997, b=1.237, 損失=0.118
第 700 輪: a=1.997, b=1.240, 損失=0.118
第 800 輪: a=1.997, b=1.242, 損失=0.118
第 900 輪: a=1.997, b=1.243, 損失=0.118
第 1000 輪: a=1.997, b=1.243, 損失=0.118訓練完成!
我們的模型找到: a ≈ 1.997, b ≈ 1.243
真實規律是: a = 2, b = 1看! 模型通過1000次迭代,
a從 0 逐漸接近 2,b接近 1,損失不斷下降。
9. 可視化學習過程
- 損失下降曲線:
plt.plot(loss_history)
plt.xlabel('訓練輪數 (Epoch)')
plt.ylabel('損失 (MSE)')
plt.title('損失隨訓練過程下降')
plt.grid(True, alpha=0.3)
plt.show()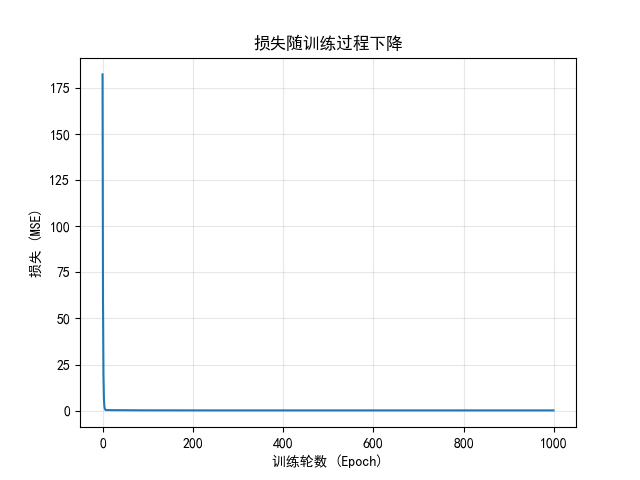
- 參數變化過程:
plt.plot(a_history, label='a (斜率)')
plt.plot(b_history, label='b (截距)')
plt.axhline(y=true_a, color='g', linestyle='--', label='真實 a')
plt.axhline(y=true_b, color='r', linestyle='--', label='真實 b')
plt.xlabel('訓練輪數')
plt.ylabel('參數值')
plt.legend()
plt.grid(True, alpha=0.3)
plt.show()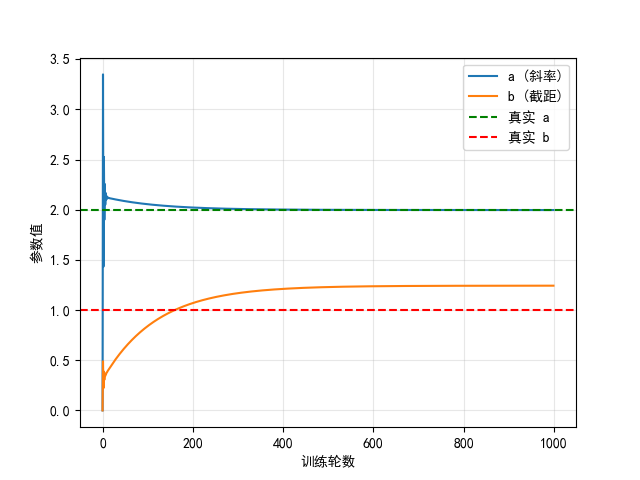
- 最終擬合結果:
plt.figure(figsize=(8, 6))
plt.scatter(x, y, color='blue', label='真實數據點', s=50)
plt.plot(x_line, y_line, 'g--', label=f'真實規律 y={true_a}x+{true_b}', linewidth=2)
plt.plot(x_line, a * x_line + b, 'r-', label=f'擬合線 y={a:.2f}x+{b:.2f}', linewidth=2)
plt.xlabel('x')
plt.ylabel('y')
plt.title('梯度下降擬合結果')
plt.legend()
plt.grid(True, alpha=0.3)
plt.show()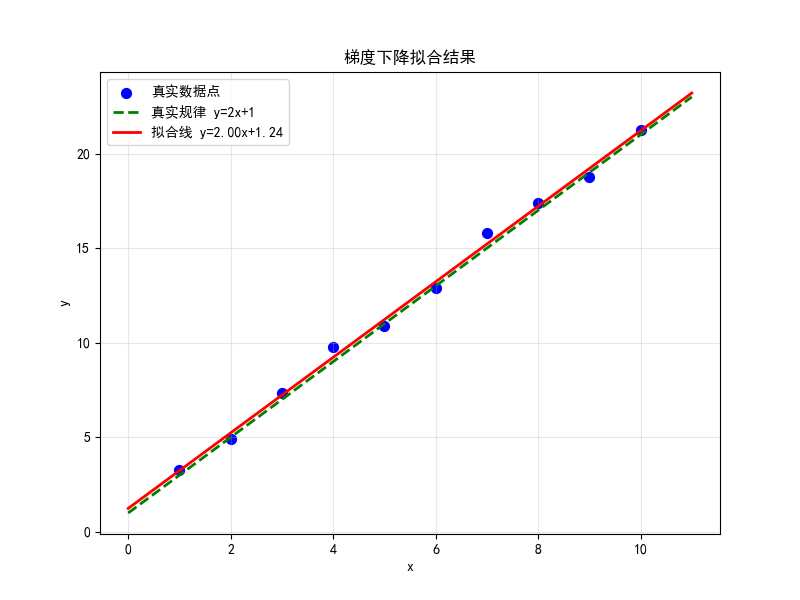
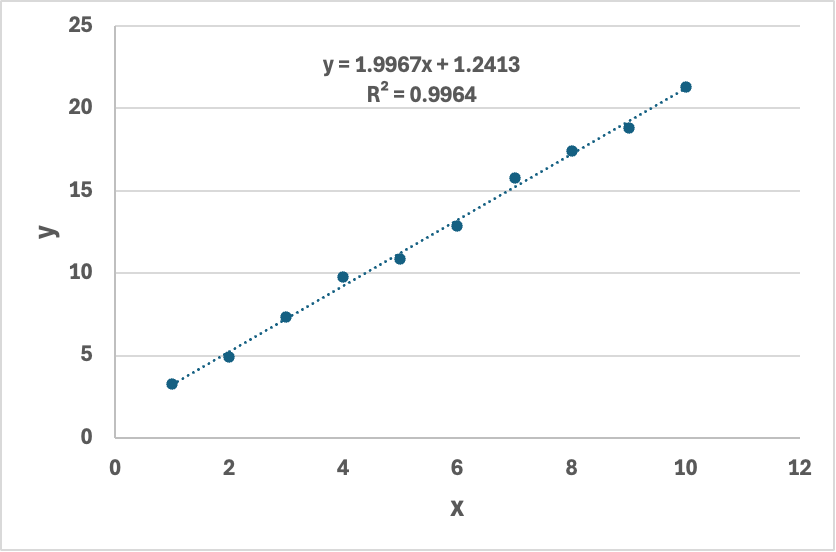
- excel擬合結果:
10. 對比專業工具:Scikit-learn
讓我們看看專業的機器學習庫 scikit-learn 是怎么做的:
from sklearn.linear_model import LinearRegression# 注意:sklearn 需要 2D 輸入
X = x.reshape(-1, 1)model = LinearRegression()
model.fit(X, y)print(f"Scikit-learn 結果: 斜率 a = {model.coef_[0]:.3f}, 截距 b = {model.intercept_:.3f}")輸出:
Scikit-learn 結果: 斜率 a = 1.997, 截距 b = 1.243完全一致! 我們手動實現的梯度下降,和 sklearn 的結果一樣。
附. 深入理解:梯度下降 vs 解析法——殊途同歸的兩種智慧
你可能會問:“我們手動實現的梯度下降,和 scikit-learn 的 LinearRegression,是同一種方法嗎?”
答案是:不是。 它們在求解方式、數學基礎和適用場景上有本質區別。但最終結果一致,是因為它們都在尋找同一個“最優解”。
下面,我們來揭開這個“黑箱”。
一、核心原理:迭代逼近 vs 數學解析
| 方法 | 核心思想 | 求解方式 |
|---|---|---|
| 手動梯度下降 | 逐步“試錯”,像盲人下山,一步步逼近最優解。 | 迭代法:重復“計算梯度 → 更新參數”直到收斂。 |
| scikit-learn LinearRegression | 直接用數學公式算出理論最優解,一步到位。 | 解析法(閉式解):通過公式?w = (X?X)?1X?y?直接計算。 |
1. 手動梯度下降(迭代法)
數學邏輯:
定義損失函數(MSE):
計算梯度(偏導數):
,
更新參數:
? ? ?(η?為學習率)
特點:
近似解:需要足夠迭代才能接近最優。
適用于大數據:可分批處理(如隨機梯度下降)。
需調參:學習率、迭代次數等。
2. scikit-learn LinearRegression(解析法)
數學邏輯:
將問題表示為矩陣形式:
最優參數?ww?的閉式解為:
這個公式是通過對損失函數求導并令其為 0 推導出的理論最優解。
特點:
精確解:無需迭代,一步到位。
計算復雜度高:矩陣求逆的復雜度為?O(n3)O(n3),特征數多時很慢。
無超參數:直接計算,無需調學習率。
二、關鍵差異對比
| 維度 | 梯度下降(迭代法) | LinearRegression(解析法) |
|---|---|---|
| 求解方式 | 逐步迭代逼近 | 直接公式計算 |
| 結果性質 | 近似解(可無限接近) | 理論最優解 |
| 計算效率 | 大數據更高效 | 特征多時慢 |
| 超參數依賴 | 需調學習率、迭代次數 | 無超參數 |
| 適用場景 | 大數據、高維(如深度學習) | 小數據、低維(如本例) |
| 數值穩定性 | 受學習率影響 | 受多重共線性影響 |
三、為什么結果能一致?—— 殊途同歸
盡管方法不同,但我們的手動實現和 sklearn 結果幾乎一致,原因在于:
梯度下降的迭代過程,本質上是在數學上“收斂于”解析法的最優解。
就像用牛頓法求方程的根:雖然是迭代過程,但最終會無限接近理論上的精確解。
在本例中,由于數據量小、特征少,解析法高效且精確。而梯度下降通過300次迭代,也成功逼近了這個最優解。
四、通俗類比
- 梯度下降:像盲人下山,通過感受坡度,一步步向下走,最終到達谷底,適用于復雜、大規模問題,是深度學習的基石。
- 解析法:像使用 GPS,直接定位谷底坐標,一步到位,適用于簡單、小規模問題,高效精確。
兩種方法最終會到達同一個“山底”,只是路徑和效率不同。













)
)
?$語法規則)



