注:本內容由”數模加油站“ 原創出品,雖無償分享,但創作不易。
歡迎參考teach,但請勿抄襲、盜賣或商用。
E 題 AI輔助智能體測
《國家學生體質健康標準》的頒布,有效地促進了大中小學生關注自身體質健康的發展,激勵學生積極進行身體鍛煉。通過在體育場地周邊安裝攝像頭,可以對學生的體育動作進行實時捕捉,以便對學生的運動姿態進行分析。例如,在立定跳遠教學中,通過記錄并分析學生起跳瞬間的腿部發力動作、手臂擺動軌跡、身體騰空姿態以及落地姿勢等一系列身體變化的細節數據,可以幫助教師全面了解每個學生動作的優點和不足,從而給出針對性的改進方案。
通過攝像頭拍攝的圖像,利用AI人體姿態估計技術可以定位復雜場景中小尺度人體的關鍵點位置。基于AI的人體姿態識別算法,可以對運動者的姿態進行跟蹤,獲得人體關鍵節點在運動過程中不同幀的運動視頻和位置坐標信息。請建立數學模型,解決以下問題。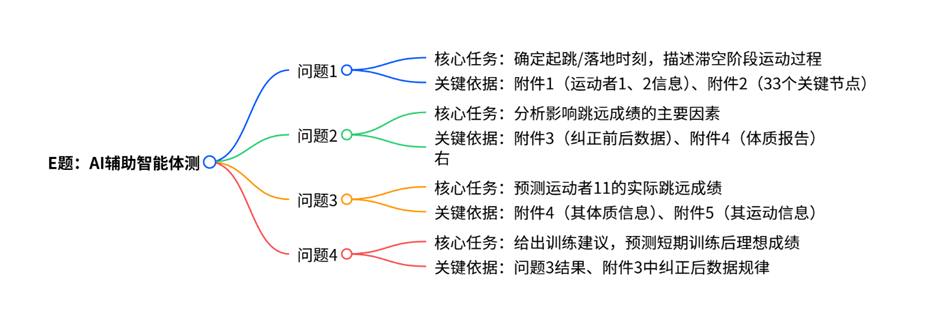
問題一、題意重述與數據理解
任務:給定兩位運動者的跳遠視頻與逐幀關鍵點坐標(共 33 個關鍵點),判定起跳時刻與落地時刻,并描述滯空階段(起跳至落地)的運動過程。
數據:附件 1 含“視頻 + 位置信息 + 成績”;位置信息為不同幀的 33 個關鍵點坐標(附件 2 給出關鍵點示意編號)。
目標輸出:
- 精確幀號/時間的起跳與落地時刻;
- 滯空階段的質心軌跡、速度/加速度、起跳角、初速度等運動學量及姿態演化(關節角、擺臂/屈髖策略)描述。
二、建模假設與坐標系 - 像素坐標系:視頻坐標 ((x,y)) 以右向為正 x、下向為正 y(常見圖像坐標),幀間隔 (\Delta t=1/f)((f) 為幀率)。
- 平面近似:以 2D 關鍵點為主(若有多機位/深度可擴展至 3D,但本題以 2D 為主)。
- 質心(COM)近似:用關鍵點的加權平均近似人體質心(無體段權重時可先用等權平均,若有體段比例可引入 Dempster/De Leva 權重,作為進階)。
- 滯空階段氣動阻力忽略:COM 軌跡近似拋物線(像素尺度上仍成立);地面對腳部的接觸判定由足部關鍵點運動學給出。
三、變量定義與數據結構
第 (t) 幀第 (i) 個關鍵點坐標:((x_{i,t},y_{i,t})),(i=0,\dots,32)。
幀時間:(t=n\Delta t),(n\in\mathbb{Z}{\ge0})。
質心:
等權近似:(\displaystyle x{COM,t}=rac{1}{N}\sum_{i=1}^N x_{i,t},\quad y_{COM,t}=rac{1}{N}\sum_{i=1}^N y_{i,t})((N=33))。
加權近似:(\displaystyle x_{COM,t}=rac{\sum_i w_i x_{i,t}}{\sum_i w_i},\quad y_{COM,t}=rac{\sum_i w_i y_{i,t}}{\sum_i w_i}),(w_i) 為體段質量權重(可按段映射到關鍵點)。
數值微分:
其中 (s_) 可為 (x_{COM},y_{COM}) 或特定關鍵點坐標。
四、預處理與信號平滑
為降低關鍵點抖動與遮擋噪聲,建議:
- 置信度篩選(若數據含置信度 (c_{i,t})):低于閾值的點用插值/上次有效值替代。
- 空值插補:分段線性/三次樣條。
- 平滑:Savitzky–Golay(窗長 (2k+1)、多項式階 (d)),或三次樣條/雙向移動平均,兼顧不滯后與導數穩定。
- 時間同步:如存在多流數據,先對齊至統一幀號。
五、起跳與落地的多源判定策略(核心)
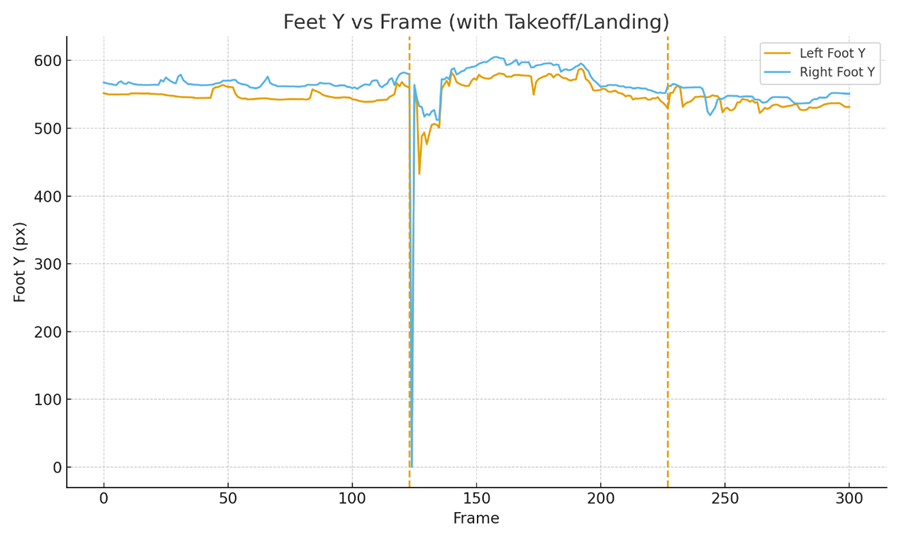
5.1 足部接觸離地判據(主判據)
設左右腳關鍵點為 (\mathcal{F}L,\mathcal{F}R)(通常為“腳/踝/腳尖/腳跟”中的一個或多個;題給 33 點結構可由附件 2 對應到索引)。
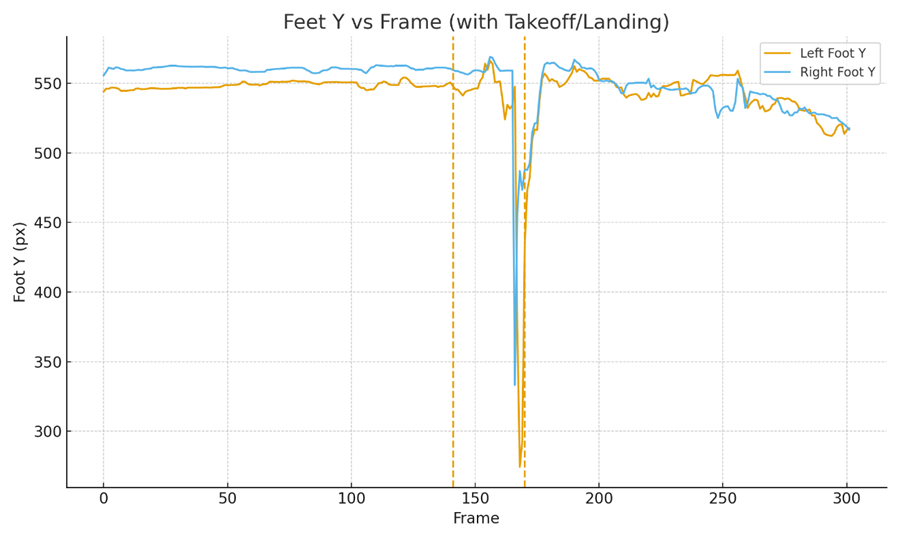
組合足高:(\displaystyle y{foot,t}=rac{1}{2}ig(y{\mathcal{F}L,t}+y{\mathcal{F}_R,t}ig))。
像素坐標下 y 越大越靠下(近地)。
起跳(Takeoff):從支撐期轉入騰空,表現為
- (y_{foot,t}) 在起跳前出現快速減小(腳上抬)——導數 (dy_{foot}/dt<0) 峰值;
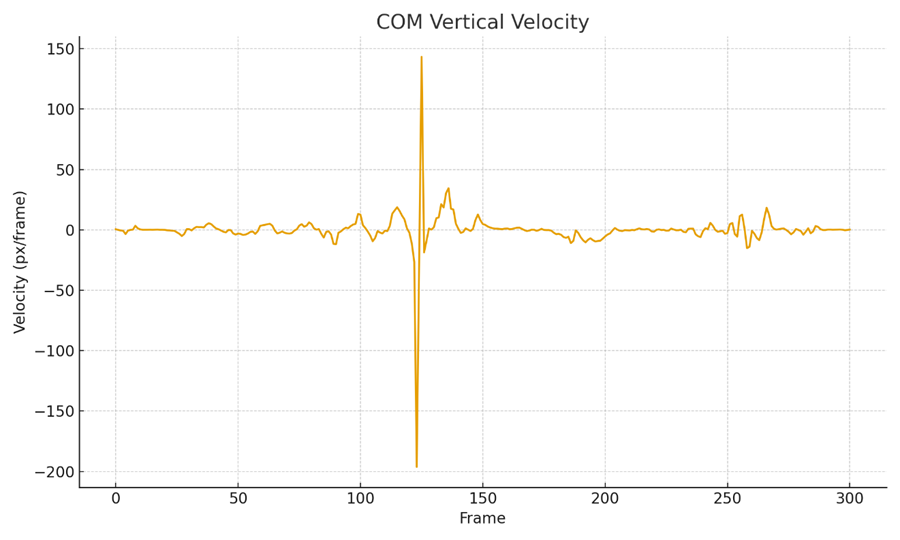
- 與此同時,COM 豎直速度 (v_{y,COM}) 由向下轉為向上或達到向上峰值附近;
- 接觸指示(如腳部與地面距離增加/腳踝腳趾相對運動指示騰空)。
落地(Landing):從騰空回到接觸,表現為 - (y_{foot,t}) 快速增大(腳下落)——導數峰值 (dy_{foot}/dt0);
- (v_{y,COM}) 由上升轉為下降并在之后靠近 0;
- 足部與地面距離回到最小、足部速度驟降。
實現上,常用組合指標提高魯棒性:
在前半段取 (S_t) 的負峰(起跳),在后半段取正峰(落地)。并通過時序約束(落地時刻起跳時刻+最小飛行幀數)避免誤檢。
5.2 地面參考與閾值化(輔判據)
若能從視頻/場地標線估計出地面 y 坐標 (y_{ground}),則以
(\displaystyle d_{foot}(t)=y_{foot,t}y_{ground})
進行閾值化(如 (d_{foot}<arepsilon) 視為接觸),接觸非接觸的邊界即為起跳,非接觸接觸即為落地。
若無顯式地面,取跑道/坑邊緣等靜態像素線自動估計 (y_{ground})(RANSAC 擬合直線)或以腳跟/腳尖最小 y的運行最小值曲線作代理。
5.3 速度/能量一致性校驗
起跳幀附近:(v_{y,COM}) 應接近正峰前或從負轉正的過零點;
落地幀附近:(v_{y,COM}) 負向且接近谷值后回升;
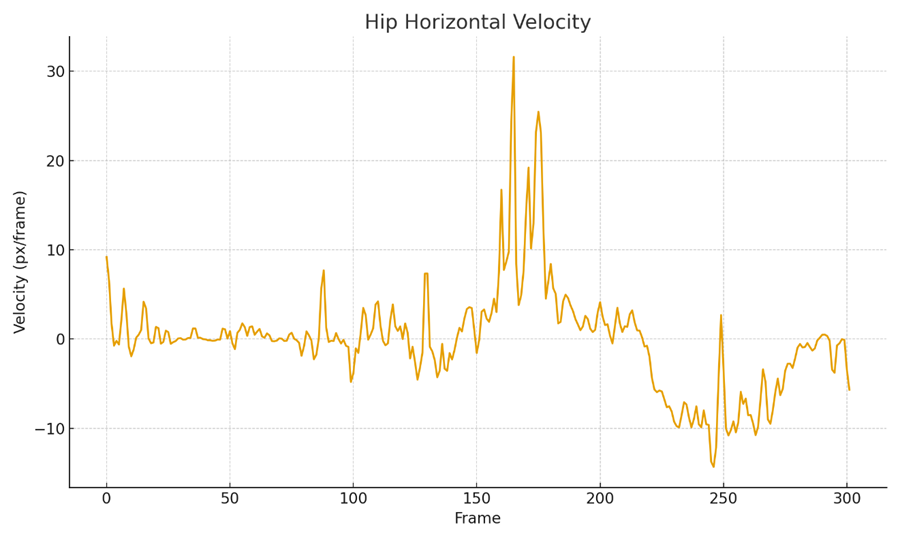
水平方向:(v_{x,COM})(或髖 (v_{x,hip}))在滯空期近似常值。
六、滯空階段的動力學與幾何量提取
設檢測得起跳幀 (t_{to})、落地幀 (t_{ld}),滯空區間 (\mathcal{T}={t\mid t_{to}\le t\le t_{ld}})。
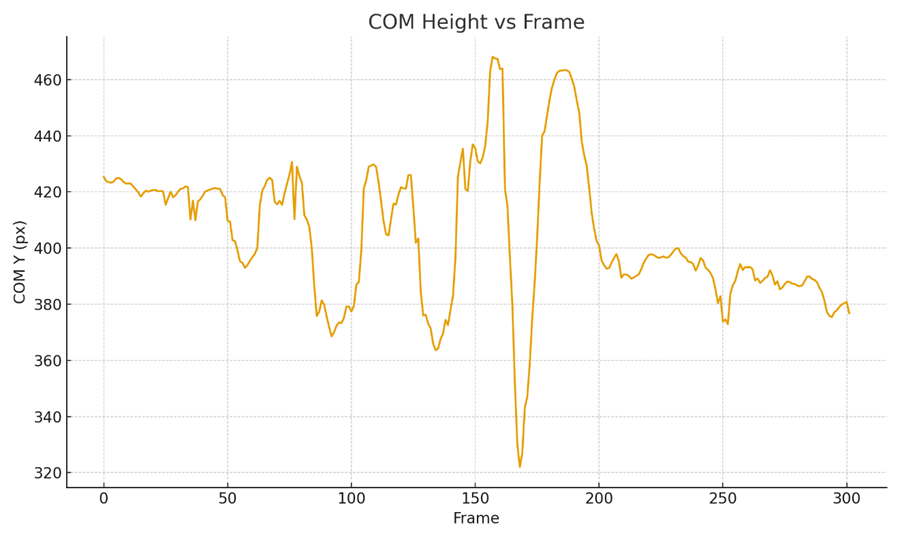
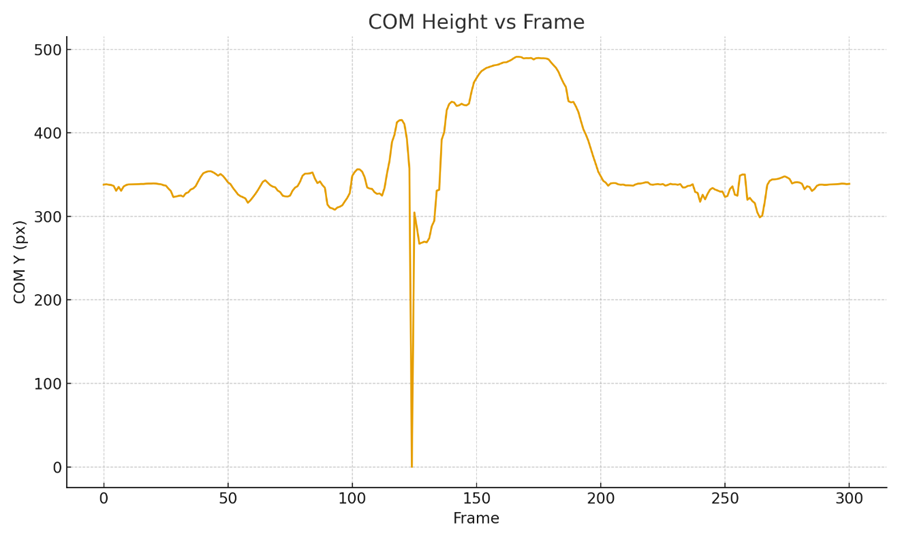
6.1 拋物線擬合(像素域)
對 ((t,y_{COM}(t))) 在 (\mathcal{T}) 內做二次擬合
有效“重力”像素加速度:(\hat g=2a)(像素標度 + 攝影幾何嵌入其中)。
飛行時間:(T=(t_{ld}t_{to})\Delta t)。
水平速度:(\displaystyle v_{0x}pprox rac{x_{COM}(t_{ld})x_{COM}(t_{to})}{(t_{ld}t_{to})\Delta t})(或線性擬合 (x_{COM}) 對 (t) 的斜率)。
起跳角(像素域近似):
若能做尺度標定(如已知沙坑刻度/標線長度),將像素/幀米/秒,實現物理量化。
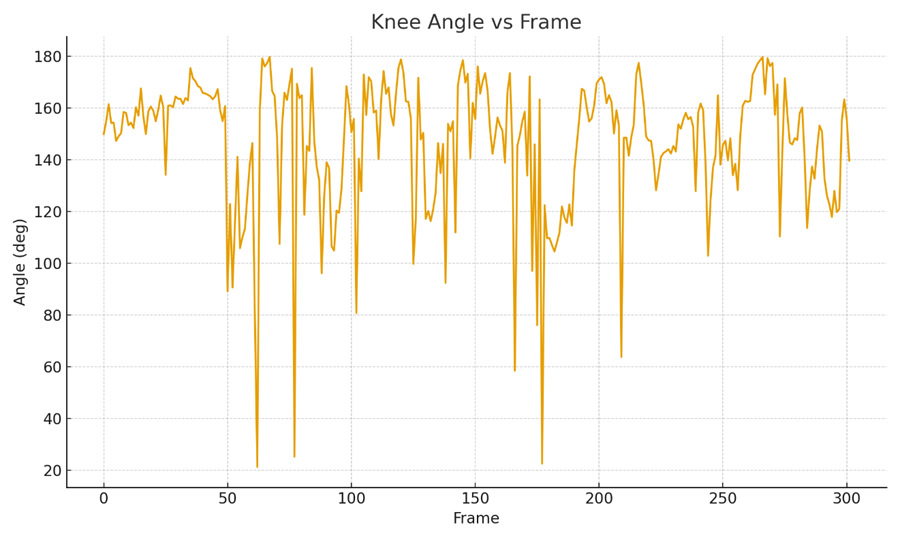
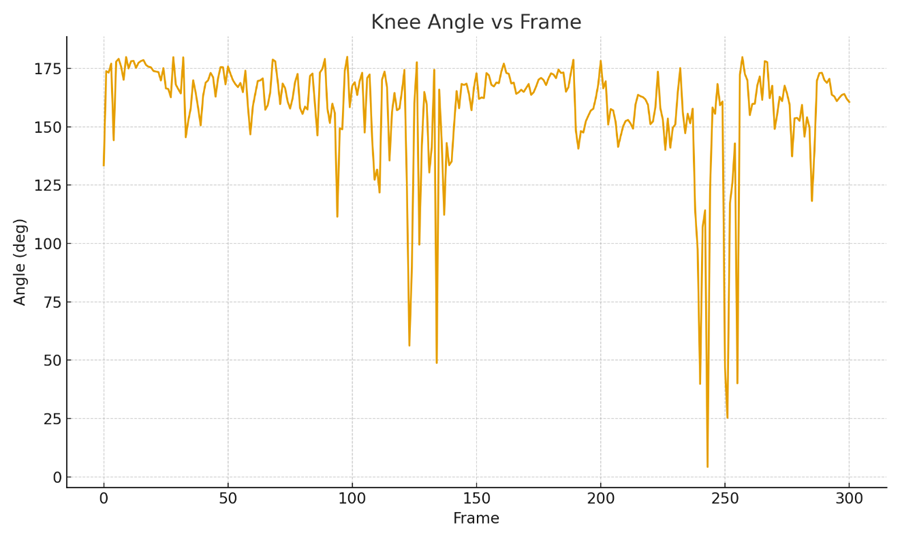
6.2 姿態時序(關節角)
以膝角為例,設髖膝踝三點為 \mathbf{H},\mathbf{K},\mathbf{A}:

滯空期內統計:
( heta_{knee}(t)) 的均值/極值/變化幅度;
手臂(肩–肘–腕)擺動角度與相位;
髖角(肩–髖–膝)反映屈髖抱膝策略。
七、可視化與結果呈現
- 足部 y–t 曲線(左右腳同圖),標注起跳/落地豎線;
- COM 高度 y–t 與擬合拋物線;
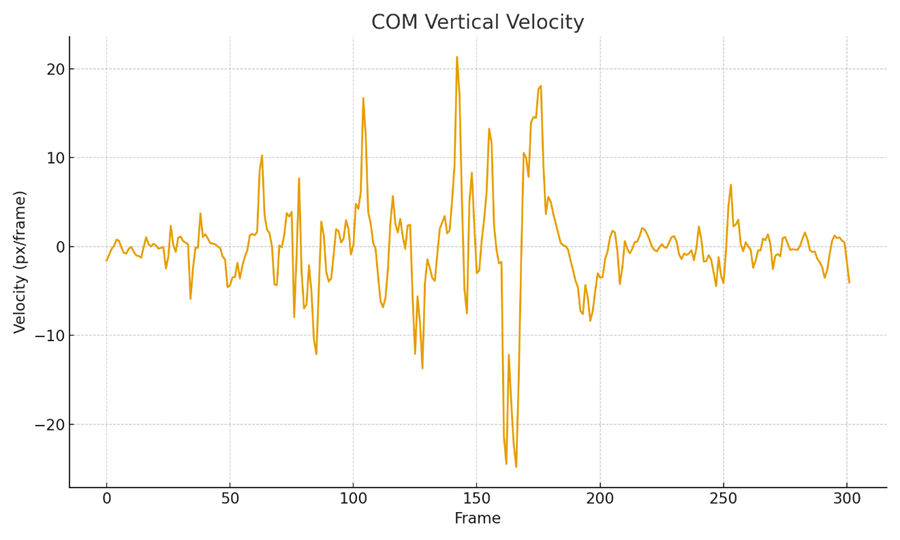
- COM 豎直/水平速度–t;
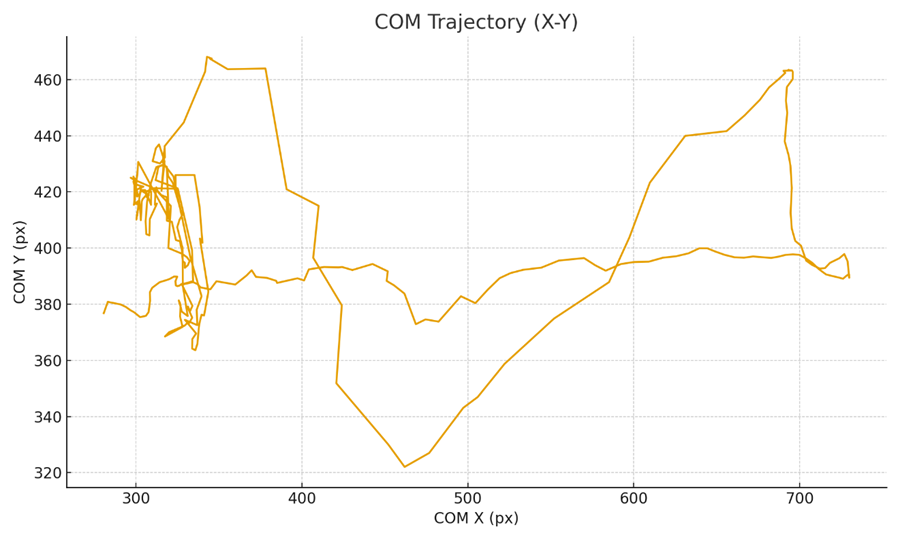
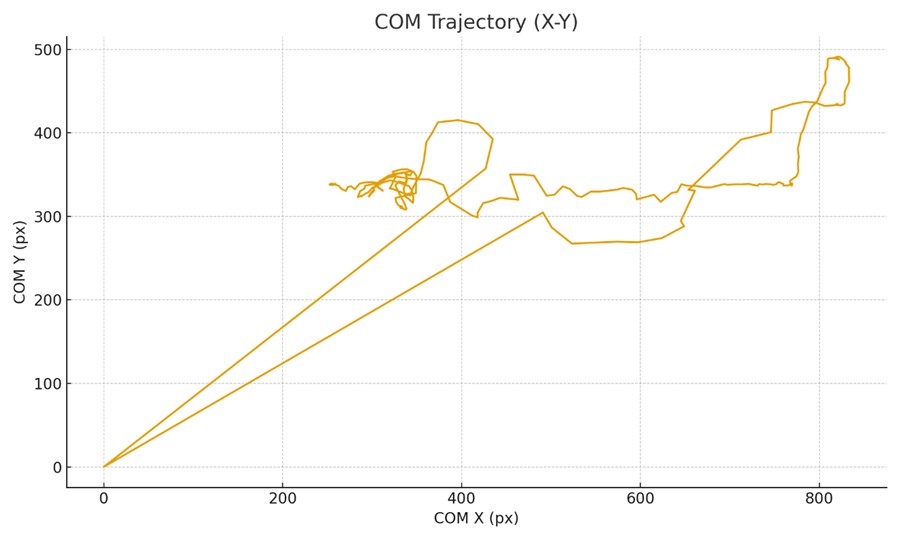
- COM 軌跡 x–y(像素平面);
- 關鍵幀骨架圖(起跳瞬間、滯空最高點、落地瞬間);
- 關節角–t(膝/髖/肩/肘)。
課堂演示時,建議將兩位運動員的對應曲線同軸對比,便于講評差異。
八、魯棒性、邊界情形與誤差來源
抖動與遮擋:用置信度篩選 + 插值 + 平滑;對于短時遮擋,優先使用相鄰關節的幾何一致性重建(如脛骨長度近似常數)。
相機傾斜/透視:建議在跑道/沙坑邊做單應性標定,把像素映射到“地面參考系”;至少做縱軸傾角校正,提高“高度/角度”解釋性。
幀率低:起落時刻可落在兩幀之間,報告幀級不確定度 (\pm0.5) 幀,并給出以 (\Delta t) 計的時間誤差帶。
不同人體比例:若使用等權 COM,會引入系統偏差;引入體段權重可減小誤差。
閾值選擇:足部接觸閾值、導數峰檢測閾值應通過留一交叉驗證在訓練組上確定,報告對閾值的靈敏度分析。
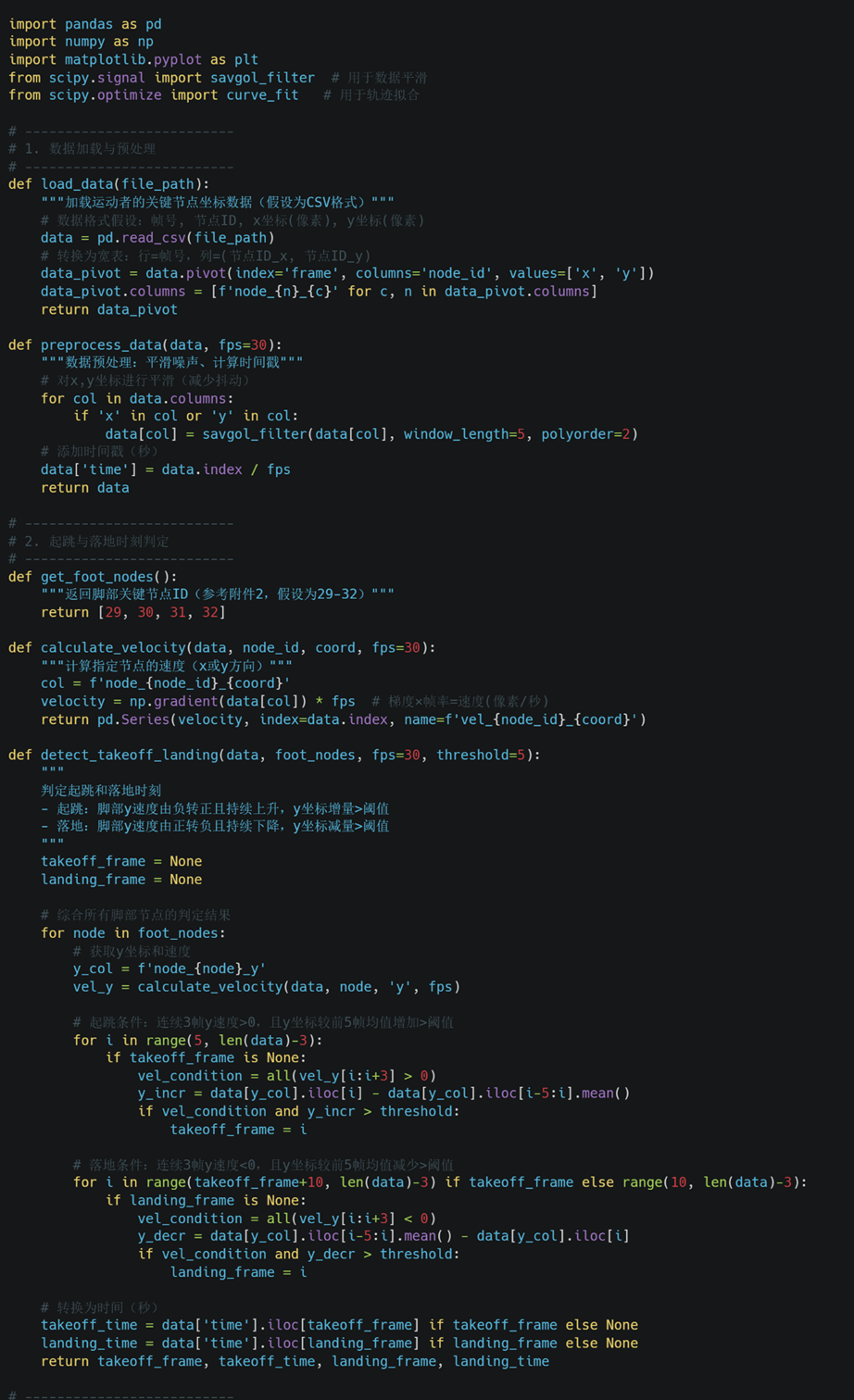
九、算法流程圖與代碼(可直接實現)
流程:數據讀入 置信度/缺失處理 平滑 計算足部/COM 時序量 一致性峰值檢測(起跳/落地) 滯空段擬合與參數估計 姿態角計算 可視化與報告。
代碼部分:
問題二
-
研究目標與數據概覽
目標:基于“糾正前/糾正后的姿態與成績”和“個體體質特征”,找出顯著影響跳遠成績的主要因素,并量化其重要性與邊際效應。
數據
附件3:若干運動者糾正前、教練糾正姿勢后的視頻+關鍵點坐標+成績(“成績提升可較大幅度出現”提供天然干預前后對照)。
附件4:運動者個人體質報告(年齡、身高、體重、體脂率、肌肉/骨骼肌重量、水分、蛋白等體成分指標)。 -
整體方法論路線
- 特征工程(從姿態時序+體質報告中提煉“可生物力學解釋”的中間變量);
- 模型建構(多層/半參數/稀疏回歸 + 非線性樹模),做變量篩選與穩健性對照;
- 因果與對照設計(利用前后糾正的配對結構控制個體固定效應,估計“姿態糾正”的平均處理效應);
- 可解釋性(標準化系數、Elastic Net稀疏選變量、GAM平滑項、XGBoost/GBDT的SHAP重要性與PDP曲線);
- 穩健性檢驗(多重共線、留一被試交叉驗證、敏感性分析)。
- 特征工程(核心)
3.1 來自姿態時序(每次試跳,糾正前/后各一條記錄)
以問題一的流程為基礎(起跳/落地檢測、滯空段判定),從每條試跳的33關鍵點時序中得到運動學要素:
起跳/落地與飛行
滯空時間:
COM 初速度:,起跳角:
COM 拋物線擬合參數 與擬合殘差 RMSE(動作穩定性代理)
動力學代理(相對量)
助力擺臂幅度:滯空期上臂(肩–肘–腕)角度的峰谷差、擺動功率代理(角速度/角加速度 RMS)
下肢伸展與抱膝:膝角 、髖角 的最大伸展角、抱膝期的最小角、角度變化速率
身體前傾/軀干角:頸–髖–膝(或肩–髖–腳)構成的軀干俯仰角平均值與峰值
對稱與協調:左右臂/腿相位差、協方差(協調性度量)
時序到標量的匯總方式(對每條試跳):
統計量:均值/最大/最小/極差/標準差/RMS/峰度/偏度
頻域要素:FFT 第一峰頻率與幅值(擺臂頻率)、能量分布比
形狀匹配:DTW 與“理想模板”的距離(高級但加分項)
以上每項都可明確映射到“力學/技術要點”,便于論文“機制解釋”。
3.2 來自體質報告(附件4)
體格:身高、體重、BMI、四肢相對比例(如可由身高估算,或來自姿態靜態幀)
體成分:體脂率、肌肉重量、骨骼肌重量、水分、蛋白、去脂體重、內臟脂肪等級等
綜合指數:肌脂比(肌肉重量/脂肪重量估計)、相對下肢肌量(若能分段更佳)
將體質指標與技術指標拼接成統一特征向量;對量綱差異做標準化(zscore)。
- 問題建模:兩類核心問題
4.1 “成績水平”的影響因素(橫截面/混合效應)
令第 個運動者在第 次試跳(前/后)成績為 (單位 cm),特征向量為 (包含姿態/運動學與體質),建立:
(a) 多元線性/稀疏回歸
標準化系數便于比較影響大小;
用 LASSO/Elastic Net 做變量篩選,處理共線與小樣本高維問題;
K 折交叉驗證選擇 。
(b) 半參數廣義可加模型(GAM)
用平滑函數 捕捉非線性(如體脂率與成績的非線性閾值效應)。
? 非線性集成模型(XGBoost/LightGBM)
獲取特征重要性與SHAP 值,可視化邊際效應(PDP/ICE);
與線性系對比,驗證變量影響的穩健性。
(d) 分層/混合效應模型(控制個體異質性)
為個體隨機效應,吸收先天差異與未觀測特質。
4.2 “成績提升”的影響因素(配對/因果角度)
利用糾正前—后的配對結構,分析“姿態改變”帶來的成績增益 。
(a) 配對差分回歸(控制個體固定效應)
是糾正后?糾正前的技術變量變化(如 擺臂幅度、抱膝角等);
這樣剝離了個體不變的體質與先天差異,直擊“技術調整”的邊際貢獻。
(b) 處理效應(是否被“糾正”+糾正幅度)
若部分被試“糾正強度”不同,可引入二值/強度處理 與交互項:
近似平均處理效應, 則刻畫“糾正與關鍵技術變量的交互”。
5. 候選“主要因素”清單(從理論與實踐出發)
技術/姿態(強相關候選)
- 起跳角 與初速度分解 :起跳角過小→垂直滯空不足;過大→水平位移損失;一般存在最優角附近的非線性。
- 擺臂貢獻:擺臂幅度與速度(角速度/角加速度),與 的提升相關;
- 下肢伸展與抱膝:起跳瞬間的髖膝踝伸展幅度、滯空期抱膝角度與時機,影響滯空姿態與落地觸地點;
- 軀干前傾與身體重心前移策略:影響 與落地區域;
- 動作穩定性:COM 軌跡擬合殘差/角度波動(小→穩定)。
體質/體成分(中強相關候選)
6) 身高/下肢比例:影響擺動半徑、可實現的 ;
7) 肌肉量/骨骼肌重量:與爆發力、伸髖伸膝能力相關;
8) 體脂率:過高→相對力量下降,過低→不一定劣但可能與肌量不足相關,呈U 形或閾值效應;
9) 體重:以相對力量(如力量/體重或肌肉/體重)更合理;
10) 水分/蛋白/去脂體重:反映肌肉狀態與疲勞水合,對當日表現有邊際影響。
-
變量選擇與可解釋性
篩選路徑:先用Elastic Net(處理共線)→ 得到一組稀疏主因子;
用 GAM / XGBoost 檢查非線性與交互(如 ×體脂率);
重要性報告:
線性:標準化回歸系數 排名;
樹模:SHAP 值 TopN 排名,給出PDP(邊際效應曲線);
配對差分模型: 技術變量系數 的顯著性與效應量。 -
統計檢驗與穩健性
交叉驗證:K 折(或留一被試)驗證泛化;
多重共線:VIF 檢查,必要時做 PCA 降維;
敏感性分析:刪去極端樣本/低置信度幀重算;改變平滑窗長/閾值看結論是否穩定;
Ablation:僅用體質→僅用技術→二者合并,比較 /MAE/IC(秩相關);
異方差與穩健標準誤:White/HC 標準誤;
多重比較:必要時 FDR 校正。
8. 結果呈現建議(論文/答辯)
表1:變量定義與物理含義(體質 vs 技術)
表2:主要模型的回歸系數/顯著性/標準化系數
圖1:糾正前后成績箱線圖與提升分布()
圖2:SHAP 全局重要性條形圖(Top10 因素)
圖3:關鍵變量的 PDP 曲線(、體脂率、擺臂幅度…)
圖4: 對 的散點回歸(配對差分)
圖5:Ablation 對比條形圖(僅體質/僅技術/合并)
可復現實現代碼
后續都在”數模加油站“…
)






)
)




算法詳解與應用)


)


