在當前高校機器人工程、人工智能、自動化等專業的教學與科研中,師生們常常面臨一個核心痛點:缺乏一套 “開箱即用、可深研、能落地” 的自主移動導航平臺 —— 要么是純仿真環境脫離實際硬件,要么是硬件零散需大量時間搭建,要么是技術門檻過高難以適配教學場景。針對這一需求,普藍機器人推出 AutoTrack-4X 導航套件平臺,以 DR100 底盤為硬件載體,集成高精度 SLAM 系統、智能導航算法與模塊化設計,完美匹配高校 “教學實驗 + 科研驗證” 雙重需求,讓復雜的自主移動技術變得 “看得見、摸得著、能上手”。

一、AutoTrack-4X 導航套件:高校機器人教學科研的 “全能助手”
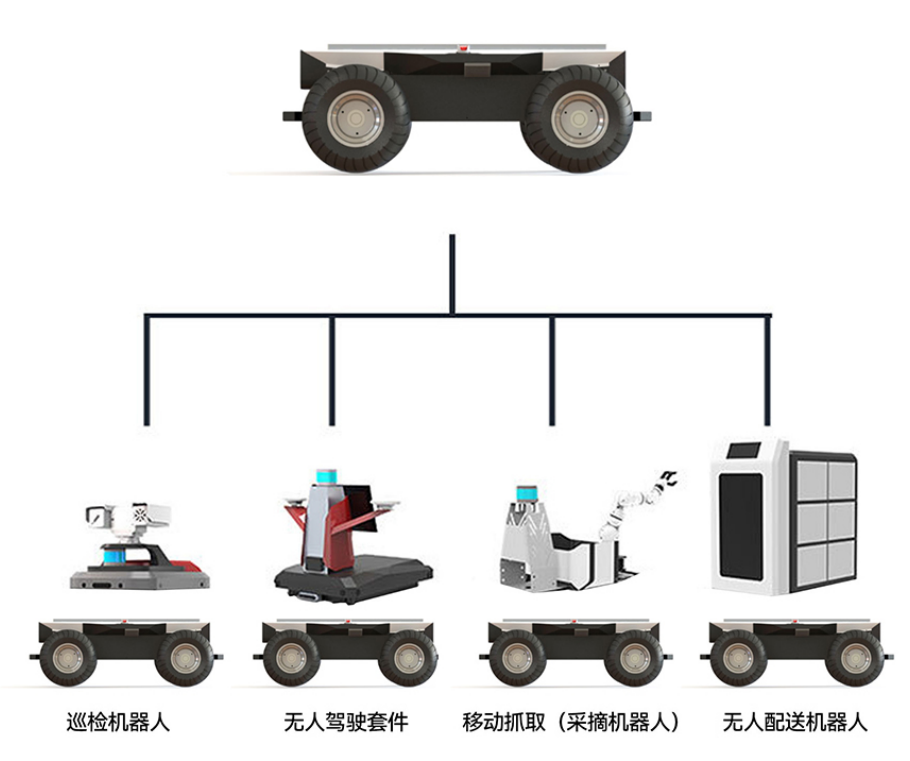
AutoTrack-4X 并非單一設備,而是一套面向復雜環境自主移動任務的 “全棧式導航解決方案”—— 從硬件底盤到軟件算法,從傳感器集成到二次開發接口,覆蓋了自主移動機器人的核心技術環節,尤其適合高校開展從基礎原理教學到高階科研創新的全流程實踐。
1 先搞懂:AutoTrack-4X 的核心技術,用 “教學語言” 講明白
在介紹功能前,我們先把幾個關鍵技術詞 “翻譯” 成師生易懂的表達,避免專業術語帶來的距離感:
SLAM(即時定位與建圖):相當于機器人的 “眼睛 + 大腦”—— 機器人在陌生環境中,一邊通過傳感器 “觀察” 周圍(比如激光雷達掃環境、IMU 感知自身姿態),一邊計算自己的位置,同時畫出環境地圖,就像人在陌生校園里 “認路 + 畫路線圖” 的過程。
ROS 框架:機器人的 “操作系統”,類似電腦的 Windows 或 Linux。它能把激光雷達、底盤、算法等不同 “零件” 串聯起來,讓它們互相傳遞數據(比如激光雷達的環境數據傳給 SLAM 算法,算法計算出的路徑傳給底盤執行),避免師生重復開發 “底層通信” 模塊。

模塊化設計:好比 “樂高積木”,傳感器(激光雷達、深度相機)、計算單元(工控機)、功能模塊(導航、避障)都能靈活拆卸、替換,學生可以像 “搭積木” 一樣嘗試不同配置,比如換用不同雷達對比性能,或加裝新傳感器測試算法兼容性。
2 AutoTrack-4X 系統特點:為高校場景量身定制
AutoTrack-4X 的核心優勢,恰恰貼合高校教學與科研的實際需求,具體可拆解為 7 大核心能力:
高性能計算平臺:搭載工業級工控機,能流暢運行 SLAM 建圖、路徑規劃等復雜算法 —— 教學中,學生可實時觀察算法運行過程;科研中,無需擔心計算能力不足導致實驗卡頓。
ROS 模塊化軟件系統:基于 ROS Noetic 版本構建,所有功能以 “節點” 形式封裝(比如 “激光雷達數據采集節點”“路徑規劃節點”),師生可單獨調用或修改某一節點,既能快速理解 “分布式計算” 原理,也能便捷替換自研算法(比如用自己寫的路徑規劃算法替換默認算法)。
多傳感器融合支持:兼容激光雷達(如 Robosense RS-16)、IMU、深度相機、RTK-GPS 等主流傳感器 —— 教學中可作為 “傳感器原理” 課程的實操案例(比如對比激光雷達與深度相機的環境感知差異);科研中可根據項目需求靈活搭配傳感器(如戶外科研用 RTK 提升定位精度)。
主流 SLAM 算法集成:預裝 LeGO-LOAM、LIO-SAM 等行業常用算法 ——LeGO-LOAM 輕量高效,適合課堂演示 “實時建圖”;LIO-SAM 結合激光與慣性數據,精度更高,適合科研項目(如高精度巡檢機器人研發),師生無需從零編譯算法,節省 80% 以上的環境配置時間。
多協議通信能力:支持 CAN 總線(連接底盤)、以太網(傳大數據,如點云)、串口(連 IMU)等 —— 學生可通過分析不同通信協議的數據格式,理解 “硬件如何與軟件交互”,比如用串口工具查看 IMU 的姿態數據,直觀理解 “機器人如何感知自身狀態”。
毫秒級實時響應:數據處理與控制指令響應均達到毫秒級 —— 在教學演示中,機器人能 “即時” 響應避障指令(比如遇到障礙物 100ms 內停下);科研中可滿足動態環境(如人流場景)的實時導航需求。
全流程二次開發支持:提供配套 SDK、ROS 驅動包、仿真環境 —— 無論是學生的課程設計(如 “基于 AutoTrack-4X 的倉庫 AGV 模擬”),還是老師的科研項目(如 “戶外自主巡檢機器人算法優化”),都能基于現有平臺快速啟動,無需從零搭建硬件與軟件框架。
在一些高校機器人工程、人工智能等專業教學科研中,常常面臨缺乏 “開箱即用、可深研、能落地” 自主移動導航平臺的痛點。對此,普藍機器人推出 AutoTrack-4X 導航套件,以 DR100 底盤為硬件載體,是覆蓋硬件底盤、軟件算法、傳感器集成及二次開發接口的全棧式導航解決方案,適配高校 “教學實驗 + 科研驗證” 提供快速落地自動化方案。

)



)

)





)





作用(管理數據庫對象的存儲位置)(pg_default、pg_global))