Benchmark Datasets for Bilateral Lower-Limb Neuromechanical Signals from Wearable Sensors during Unassisted Locomotion in Able-Bodied Individuals
原文:DOI:?10.3389/frobt.2018.00014
2018年
翻譯:靠岸學術
目錄
1引言
2儀器設備設置
3數據采集協議
4后處理
5結果
6討論
Keywords: gait, locomotion, biomechanics, electromyography, benchmark
關鍵詞:步態,運動,生物力學,肌電圖,基準
1引言
輔助機器人領域的可穿戴下肢輔助設備,包括機器人外骨骼、矯形器和假肢,在數量和功能上都經歷了快速增長。這些設備已顯示出通過提供運動輔助來恢復步態障礙患者運動功能的潛力。盡管許多設備已經在各種實際條件下表現出令人印象深刻的性能,但由于以下幾個原因,客觀地比較它們的性能和提高它們的可控性仍然具有挑戰性。首先,研究中使用的結果指標(例如,關節運動學、代謝成本、臨床評分和預測準確性)來證明使用輔助設備改善行走能力并不一致。其次,由于設備在機電設計和/或控制系統方面的限制,許多研究僅使用跑步機行走,或者沒有收集來自各種運動活動的數據。第三,許多設備正處于商業化過程中,因此測試數據很少與研究界共享。此外,許多設備都實施了自己獨特的控制框架,這些框架不夠通用,無法方便地在其他硬件上實施。因此,我們期望改善在與行走相關的活動期間獲取與設備無關的神經機械信號(研究人員可以從中開發和測試新的控制策略,然后再在硬件上實施)的途徑,這對可穿戴下肢輔助設備領域將非常有價值。
同時,針對健全人在沒有輔助設備的情況下進行生物力學步行的許多基準已經建立,其中一些是公開可用的。高分辨率生物力學步態分析的金標準是基于標記的光學運動捕捉與地面反作用力測量。幾十年前,Winter (1983) 的開創性工作使用這些技術引入了不同速度下水平地面行走 (LW) 的主體間生物力學分析。他們的規范步態數據集包括肌電圖 (EMG) 以及關節運動學和動力學模式,此后其他研究人員對其進行了擴展,以納入更多的受試者和步幅(e.g., Kadaba et al., 1990;Kirtley, 2014)。其他常見運動活動(如上下樓梯和不同幾何形狀的傾斜表面)的穩態生物力學也已在單獨的研究中使用類似技術進行了報告,但這些數據對研究人員的訪問性較差(e.g., McFadyen and Winter, 1988;Riener et al., 2002;Lay et al., 2006, 2007;Protopapadaki et al., 2007;Franz et al., 2012)。
人體運動最精確的量化方法是使用傳統的、基于實驗室的儀器和為生物力學步態分析開發的技術,通過關節運動學、動力學和肌電圖來實現。然而,可穿戴下肢機器人的令人興奮的潛力在于,它有望使這些設備更貼近日常生活,這就需要替代技術來更普遍地測量與步行相關活動期間的神經機械信號。在人類活動識別(HAR)領域,已經開發出更自由地測量人體運動的方法,該領域旨在利用連續的傳感器數據流來識別和監測常見的日常生活活動,如睡覺、走路、鍛煉和操作物體。因此,HAR產生了大量公開可用的數據集。這些存儲庫很有價值,因為它們包含來自許多受試者的許多不同類型的活動信息;然而,它們不太適合對正常運動進行更系統的表征。有時,HAR數據集是從受損人群或在更自然但復雜的組合運動中收集的,這些運動的真實活動情況更加模糊。有些數據集是使用最少的儀器(例如,僅智能手機)收集的,這很方便,但不完整。相比之下,另一些數據集依賴于非便攜式儀器(例如,光學運動捕捉或視頻),這些儀器非常精確,但不能代表在更生態的環境中控制設備可訪問的生物力學信號。此外,許多數據集僅包含單一模態(例如,運動學但沒有肌電圖),和/或使用較低的采樣率,這可能不足以用于某些在線控制方案。
據我們所知,目前尚不存在一個公開可用的數據庫,其中包含由健全個體在不同運動活動之間自由轉換時,由可穿戴傳感器同時記錄的運動學和肌電圖數據。為了解決上述一些局限性,并為可穿戴下肢輔助設備領域的研究人員提供相關的參考數據,我們引入了一個與設備無關的雙邊神經機械信號基準數據集,名為健全雙邊下肢運動信號百科全書(ENABL3S)。該數據集包含來自10名健全個體的雙邊肌電圖以及關節和肢體運動學數據,這些數據由可穿戴傳感器記錄,記錄對象在坐、站以及幾種與行走相關的活動[平地、樓梯上升(SA)/樓梯下降(SD)和斜坡上升(RA)/斜坡下降(RD)]之間自由轉換。盡管這些數據并非旨在取代現有的生物力學步態分析基準,但我們相信,通過提供更豐富的神經機械數據,這些數據是從可穿戴傳感器收集的,并使用統一的協議針對幾種不同的運動活動,它們仍然填補了這些基準和人類活動識別(HAR)數據集之間的空白。在本數據報告中,我們總結了我們對受試者進行儀器測量、收集數據以及進行偽影去除和步態分割的后處理方法。我們還總結了我們的協議所捕獲的運動活動和轉換類型,驗證了我們的結果,并以關于該領域其他研究人員如何從該數據集中受益的建議作為結論。
2儀器設備設置
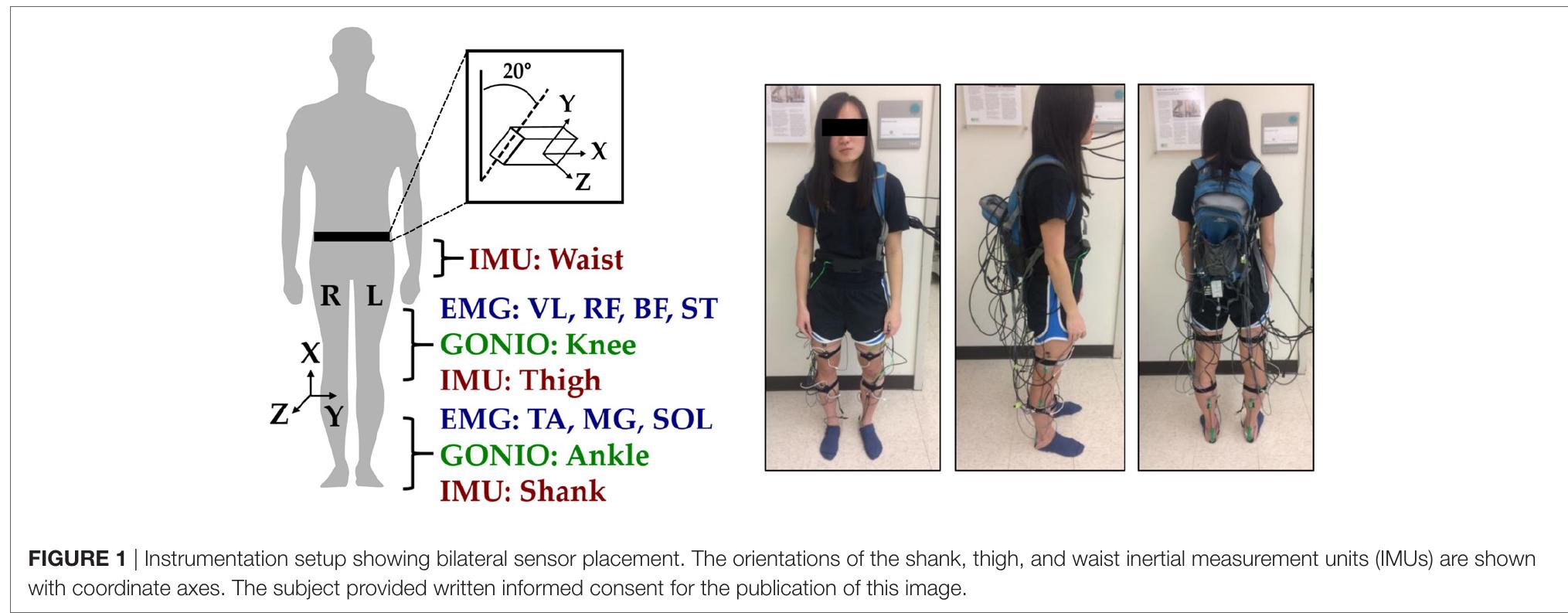
招募了十名健康的健全受試者(七名男性,三名女性;25.5 ± 2 歲;174 ± 12 厘米;70 ± 14 公斤),他們沒有任何步態障礙,并在2017年1月至2月期間完成了以下實驗流程。在行走之前,受試者佩戴了可穿戴傳感器,以測量雙側下肢肌肉活動以及關節和肢體運動學。肌電圖信號使用雙極表面電極(DE2.1;Delsys,Boston,MA,USA)記錄,來自每條腿的七塊相同肌肉:脛骨前肌(TA)、腓腸肌內側頭(MG)、比目魚肌(SOL)、股外側肌(VL)、股直肌(RF)、股二頭肌(BF)和半腱肌(ST)。選擇這些肌肉是因為它們在一定程度上負責髖部和膝部的屈曲/伸展以及踝關節的跖屈/背屈,這些運動通常由可穿戴設備輔助。當從正面和背面面對受試者時,它們也相對容易定位。通過去除多余的毛發來準備肌肉部位,并用酒精擦拭輕輕擦洗皮膚。傳感器用雙面膠粘附在皮膚上。電極放置根據非侵入性肌肉評估表面肌電圖標準通過觸診引導,并通過讓受試者進行最大自主收縮(MVC)來驗證。受試者對雙腿進行了三次踝關節背屈/跖屈和膝關節屈曲/伸展的重復動作。肌電圖信號被放大1,000×,硬件帶通濾波在20至450 Hz之間(Bagnoli 16,Delsys),并以1 kHz的頻率采樣。
使用電子測角器(SG150;Biometrics Ltd.,Newport,UK)記錄關節運動學信號(僅限矢狀面),采樣頻率為500 Hz。在試驗開始時,當受試者處于直立站立姿勢時,測角器被歸零。6自由度(三軸加速度計和陀螺儀)慣性測量單元(IMU)雙側放置在受試者的大腿(RF下方)和小腿(TA附近),采樣頻率為500 Hz(MPU-9250;Invensense,San Jose,CA,USA)。測角器和IMU使用雙面膠、彈性帶和Coban自粘繃帶固定在受試者身上。另一個IMU放置在定制的皮套中(與垂直方向傾斜20°),并用腰帶系在腰部。所有信號均通過定制的16位數據采集設備同時記錄,該設備允許多速率采樣。為了便于與我們的定制數據采集軟件集成,所有可穿戴傳感器都采用有線設置;缺點是,完全裝備每條腿需要長達一個小時。圖1顯示了代表性受試者的完整儀器設置以及IMU方向。
3數據采集協議
在一個實驗環節中,每個受試者都赤腳完成了大約25次循環,該循環包括坐(S)、站(St)、LW、以10°坡度上下斜坡(RA/RD)以及逐級上下四級樓梯(SA/SD)。選擇這些活動是因為它們涵蓋了社區步行中可能遇到的不同類型的地形,并且在一個20 . × 30 .的環路中完成。為實用性和增加重復次數留出空間。一個平臺(30英寸高)連接樓梯(7.75″高,10英寸深)和斜坡(14 . 長),以允許這些活動之間所有可能的過渡。來自每個循環的數據被分成兩個部分,并記錄為單獨的試驗。奇數試驗包括 S → St → LW → SA → LW → RD → LW → St → S。偶數試驗包括 S → St → LW → RA → LW → SD → LW → St → S。每個連續片段的總步行距離約為45 .傳感器需要重新定位或系繩纏繞的試驗將被排除。受試者被指示以他們自己選擇的速度自由地在運動活動之間過渡,并且定期進行休息以避免疲勞。實驗者使用鑰匙鏈標記受試者的真實運動意圖。數據收集最多需要2小時。
4后處理
每條腿的足跟著地和腳趾離地步態事件通過尋找脛骨段矢狀面角速度(GY)的峰值來可靠地識別,該角速度經過均值減去和低通濾波(一階Butterworth濾波器,6 Hz),使用類似于Maqbool等人(2016)的基于閾值的方法。簡而言之,首先使用角速度中最大的峰值來識別擺動中期的事件。通過搜索每個擺動中期事件之前的峰值來識別腳趾離地事件。通過搜索每個先前擺動中期事件之后的峰值來識別足跟著地事件。事件開關最初放置在每只腳的腳后跟和第一跖骨下方,但在我們的設置中觸發了許多假陰性和假陽性,這可能是由于機械磨損和/或腳在樓梯上的放置。因此,它們僅用于驗證基于IMU的分割技術。排除了受運動偽影(即,暫停和絆倒)破壞的步態事件。EMG信號經過高通濾波(六階Butterworth濾波器,截止頻率20 Hz)、低通濾波(六階Butterworth濾波器,截止頻率350 Hz)和陷波濾波(六階Butterworth濾波器,帶寬6 Hz),截止頻率分別為60、180和300 Hz,以衰減運動偽影和環境干擾。測角儀和IMU信號分別經過低通濾波(六階Butterworth濾波器),截止頻率分別為10和25 Hz。關節速度通過對關節位置進行中心差分數值微分間接計算,并添加到測角儀通道中。
所有信號被分割成分析窗口,這些窗口從每個已識別的足跟著地或腳趾離地步態事件前300毫秒開始。使用了每個已識別步態事件附近的四個額外的300毫秒分析窗口(相對于每個事件延遲30、60、90和120毫秒)。對于每個窗口,我們提取了先前用于意圖識別的特征,以控制動力膝踝假肢。測角儀和IMU通道的特征包括平均值、標準差、最大值、最小值、初始值和最終值(Varol et al., 2010)(每個通道六個特征)。EMG信號的特征包括平均絕對值、波形長度、過零點數量和斜率符號變化,以及六階自回歸模型的系數(Huang et al., 2005;Hargrove et al., 2008)(每個通道10個特征)。共有23個傳感器(14個EMG,4個測角儀,5個IMU),52個通道(14個EMG,8個測角儀,30個IMU)和368個特征(140個EMG,48個測角儀,180個IMU)。
5結果
數據以CSV格式保存在特定于被試的文件夾中,可從Figshare下載,地址為https://doi.org/10。
存在一個元數據文件,其中編錄了每個測角儀通道的文件名、匯總統計信息(平均值、標準差、最小值、最大值),以及每個電路的每個肌電圖通道的信噪比[最大值與基線均方根(RMS)電壓之比]。受試者特定文件夾還包括來自各個電路的原始和處理數據的文件夾、包含來自MVC試驗期間所有肌肉的處理后肌電圖信號的文件夾,以及包含從五個不同的300毫秒分析窗口(從為每條腿識別的步態事件之前300、270、240、210和180毫秒開始)提取的特征的文件夾。來自各個電路的數據還包含指定真實運動活動標簽、足跟接觸和腳趾離地步態事件的索引以及表示輸出和輸入運動活動和步態階段的四位觸發器的列。每個文件的第一行是指定列順序的標題。盡管有些試驗6084/m9.figshare.5362627,但為了完整起見,包括了所有試驗的后處理數據。在每個受試者特定文件夾中,包括擾動(例如,暫停、絆倒和錯過過渡),這些擾動在元數據文件中注明。然而,僅報告來自無擾動試驗片段的步態事件,并將其用于特征提取。特征數據還包含指定相應腿部階段(1,右腳跟接觸;2,右腳趾離地;3,左腳跟接觸;4,左腳趾離地)和四位觸發器的列。特征數據的第一行是指定列順序的標題。同側是指檢測到步態事件的一側(例如,右腳跟接觸和右腳趾離地事件的右腿)。
ENABL3S的總體組成如表1所示。對于每個受試者,在排除過渡到站立或從站立過渡的情況后,每條腿有530 ± 46次足跟著地事件和536 ± 45次足尖離地事件(平均值 ± 標準差)。其他受試者信息以及命名和編號的解釋也包含在Figshare上。
6討論
健全人雙側下肢運動信號百科全書(ENcyclopedia of Able-bodied Bilateral Lower Limb Locomotor Signals)代表了一個雙側下肢神經機械信號的基準,這些信號是從健全人在無輔助運動期間使用可穿戴傳感器記錄的。引入此數據集的目的并非取代現有的穩態運動生物力學步態分析基準,而是提供一套公開可用的、來自可穿戴傳感器的豐富生物力學數據,代表了傳統技術和人體活動識別(HAR)方法之間的折衷。ENABL3S包含來自幾種不同的與行走相關的活動(包括過渡)的數據,我們期望這些數據有助于理解正常運動的模式,并為可穿戴下肢輔助設備開發新的控制策略。
為了評估該數據集的有效性,我們選擇將我們的記錄(在腿和所有受試者中取平均值)與先前報告的水平生物力學測量結果進行比較。
表1 | ENcyclopedia of Able-bodied Bilateral Lower Limb Locomotor Signals的特征。
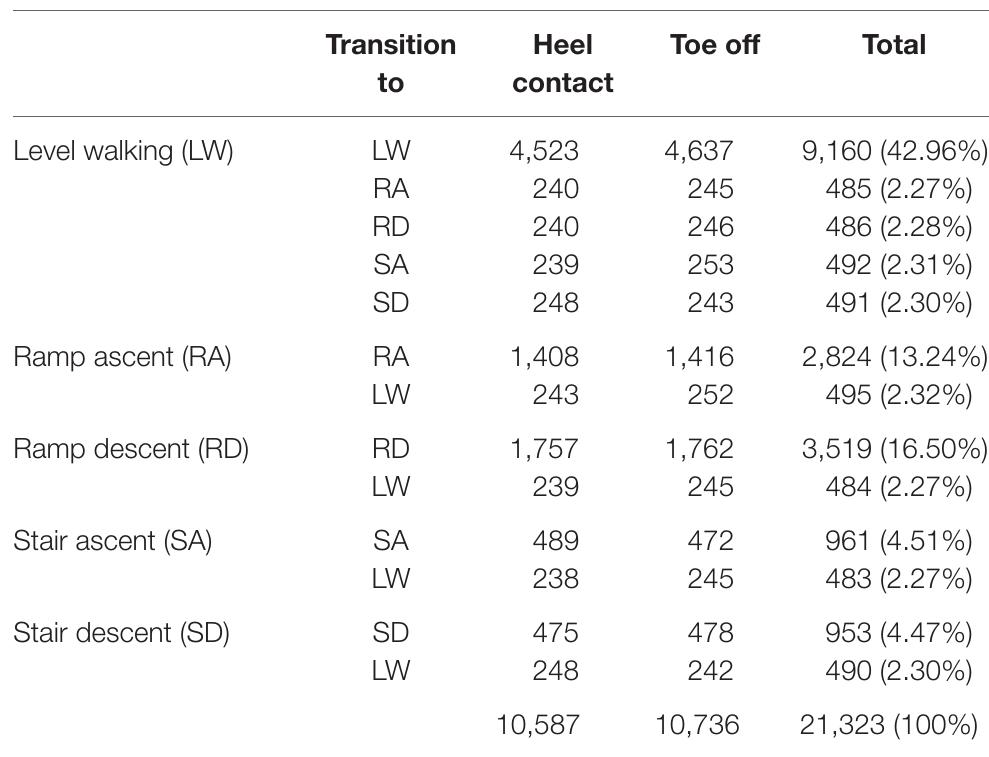
所有受試者的每種運動活動類型的步態事件總數和比例均已匯總。
步行是因為這些數據最容易獲取。由于矢狀面外的運動以及踝關節測角器的皮膚變形/相對運動,我們對踝關節位置的測量未被認為是生物力學上準確的信號。盡管如此,這些信號對于開發控制策略可能仍然有用,因為許多設備不重現生理運動和/或使用嵌入式關節編碼器來感知相對踝關節位置。然而,與先前報道的使用光學運動捕捉記錄的數據相比,我們對膝關節位置的測量更為準確(Winter, 1983;McClelland et al., 2011)。ENABL3S 與 Winter (1983) 之間的 RMS 誤差在站立相和擺動相分別為 5.9° 和 9.5°。站立相和擺動相的 R2 值分別為 0.73 和 0.94。我們報告的站立相和擺動相期間的膝關節活動范圍 (ROM) 值(初始接觸時的屈曲:10.9 ± 5.6°;站立相 ROM:6.8 ± 5.2 至 26.9 ± 5.7°;擺動相 ROM:3.4 ± 5.4 至 58.0 ± 6.5°)也與報告的值相當 (McClelland et al., 2011)。位置誤差可能歸因于行走速度的差異、傳感器與旋轉軸的輕微不對齊以及皮膚變形/相對運動的組合。膝關節位置也可以通過減去小腿和大腿 IMU 傳感器的方向來估計(可能更準確)。踝關節跖屈肌/背屈肌和膝關節屈肌/伸肌的 EMG 激活模式也與先前報道的在自選速度下未輔助的地面行走相似 (Winter, 1983;Sylos-Labini et al., 2014)。所有受試者在所有穩態水平行走步態中,來自 TA、MG、BF 和 VL 的膝關節位置和 EMG 的匯總數據可在 Figshare 上的補充文件中找到。通過確認我們測量的運動學和 EMG 信號的準確性,我們也驗證了基于 IMU 的步態分割方法。
盡管這些數據不如光學運動捕捉那樣具有高分辨率,但它們在信號分辨率、所代表活動的廣度、在線控制方案的可行性以及對現有公開人體運動數據集的貢獻之間取得了平衡。這些數據可用于開發新型控制策略,例如意圖識別(即,基于運動完成前檢測到的信號預測未來狀態),更具體地說是研究傳感器融合技術和機器學習方法,用于特征提取和分類(例如,深度學習)。這些數據也可以解釋為對健全個體在完全無質量且透明(即,完美反向驅動)的設備上行走的一種模擬,并可用于推導控制策略(如意圖識別)的設備無關上限。此處報告的原始數據也可用于比較替代控制系統的性能、評估受試者間的變異性,以及將從受損人群或使用輔助設備(例如,膝關節矯形器和踝足假肢)行走的人群收集的基于用戶的生物力學信號與未輔助的正常運動進行比較。






)




)




![[靈動微電子 MM32BIN560CN MM32SPIN0280]讀懂電機MCU之比較器](http://pic.xiahunao.cn/[靈動微電子 MM32BIN560CN MM32SPIN0280]讀懂電機MCU之比較器)


