感知機( perceptron )是二類分類的線性分類模型,其輸入為實例的特征向量,輸出為實例的類別,取+1 和-1二值。感知機對應輸入空間(特征空間)中將實例劃分為正負兩類的分離超平面,是一種判別模型。感知機是神經網絡與支持向量機的基礎
感知機學習旨在求出將訓練數據進行線性劃分的分離超平面。
感知機學習思路:
1.導入基于誤分類的損失函數
2.利用梯度下降法對損失函數進行極小化
3.代入參數得到感知機模型。
感知機學習算法分類:
原始形式、對偶形式。
感知機算法原始形式例題及詳解
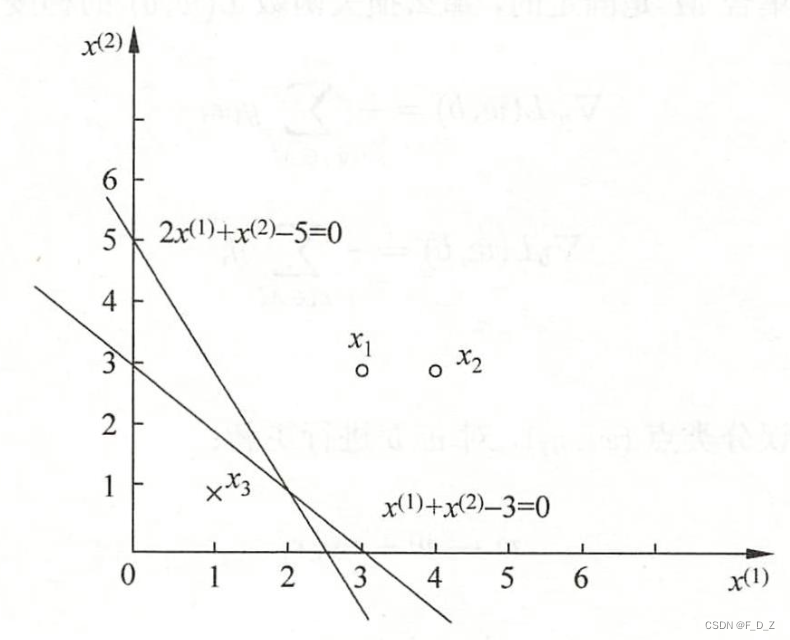
例1 訓練數據集如圖所示,正實例點為,
,負實例點為
,試用感知機算法原始形式求感知機模型,令
,
解答:
(1)建模最優化問題:
(2)取初值,
?
(3)按順序,對
,
,則
為誤分類點。更新
:
,
得到線性模型:
(4)重新選取,對,
,則均為正確分類點,不更新
;
對,
,則
為誤分類點,更新
:
,
得到線性模型:
(5)由此不斷迭代
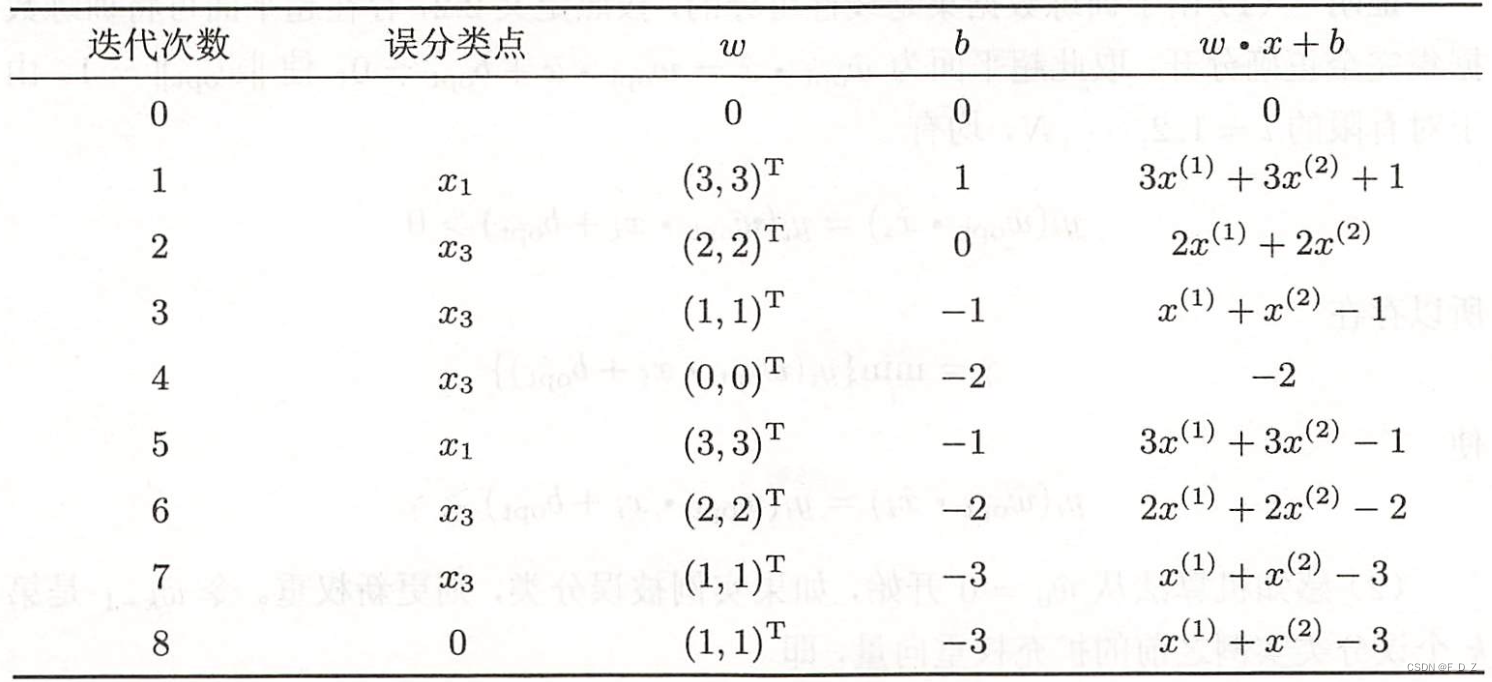
(6)直到,
線性模型:
對所有數據點,則確定分離超平面:
感知機模型
分離超平面
是按照
的取點順序得到的
例1如果更換取點順序為
,得到的分離超平面為:
由此,可知結論:感知機算法采用不同的初值或選取不同的誤分類點順序,解可以不同
感知機算法對偶形式例題及詳解
例2?訓練數據集如圖所示,正實例點為,
,負實例點為
,試用感知機算法對偶形式求感知機模型,令
,
解答:
(1)取;
(2)計算Gram矩陣
(3)誤分條件
(4)參數更新
(5)迭代
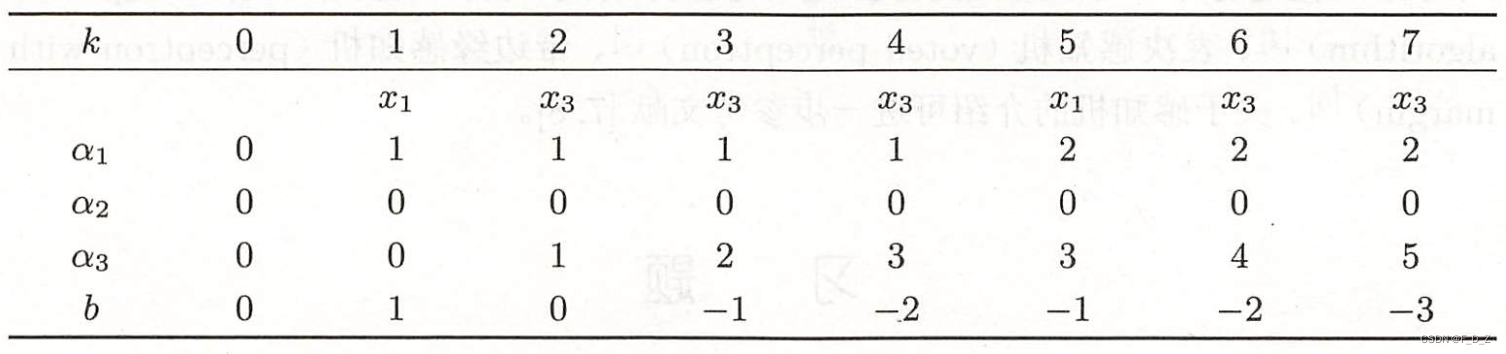
(6)最終得到
則,分離超平面:
感知機模型:
與原始形式一致,感知機學習算法的對偶形式迭代收斂,且存在多個解

)











 -> enabled)





