?一、 無人機吊艙如何與遙控器“對上暗號”?
在無人機執行物資投送、電力巡檢、災害搜救等任務時,吊艙(即懸掛于機身下方的任務設備)常成為核心作業單元。但要讓遙控器“指揮”吊艙,兩者必須實現雙向通信協議互通、電氣接口兼容、控制邏輯同步,否則指令無法傳達,吊艙如同“失聰”。吊艙與遙控器的匹配絕非簡單物理連接,而是涉及多層次的技術耦合
二、 匹配的核心技術維度
1. 通信協議:吊艙與遙控器的“共同語言”
遙控器與吊艙的指令傳輸依賴標準化協議。目前主流協議包括:
PSDK協議:專為負載設備開發的協議,支持個別機型直接接入吊艙,實現遙控器按鈕映射、參數回傳。
SBUS信號:一種串行總線協議,常用于獨立遙控器或第三方飛控。例如天途吊艙增程模塊通過SBUS傳輸操控指令,控制距離可擴展至5公里。
定制串口協議:工業吊艙常用422/RS-232接口,需設定固定波特率(如115200bps)和校驗規則。若協議不匹配,指令會解析錯誤。
2. 電氣接口:電力與信號的物理通道
供電匹配:吊艙工作電壓需與無人機電源輸出匹配。例如MS120吊艙采用24V供電,若掛載于12V無人機則無法啟動。
接口兼容:控制信號接口類型(如PWM、S.BUS、串口)必須一致。部分吊艙支持多種接口,可通過跳線切換。
3. 控制參數:動作范圍的精確同步
遙控器需預設吊艙的運動參數限值,避免超限損壞:
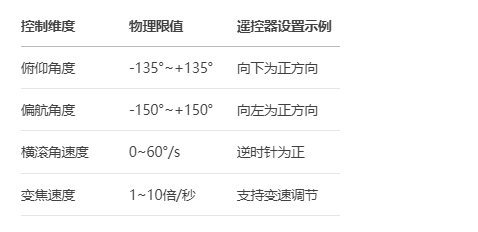
角度范圍:俯仰(-135°~+135°)、偏航(-150°~+150°)等物理極限需寫入遙控器固件。
角速度控制:遙控器發送角速度指令(單位°/s)時,需與吊艙電機響應能力匹配。
表:典型吊艙控制參數范圍
4. 軟件集成:驅動與SDK的橋梁
遙控器固件支持:需集成吊艙的驅動代碼。。
地面站軟件擴展:如SpireCV SDK提供吊艙控制API,開發者可編程實現目標跟蹤、自動變焦。
三、 如何判斷是否匹配?五大關鍵條件
1. 協議握手成功 ?
吊艙上電后與遙控器進行協議握手。若協議兼容(如均支持PSDK),遙控器界面顯示吊艙狀態(如溫度、焦距);若失敗則報“未檢測到負載”。
2. 控制指令無沖突 ?
??遙控器搖桿動作需精確映射為吊艙運動。例如:
??俯仰搖桿前推 → 吊艙向下旋轉(pitch值增大)
??沖突時可能出現鏡頭反向運動。
3. 視頻/數據流穩定傳輸 ?
??吊艙視頻需實時回傳至遙控器屏幕。常見傳輸方式包括:
??RTSP推流:網口輸出H.264/H.265視頻流,地面站通過IP地址接收。
??圖傳融合:吊艙圖像經無人機圖傳系統中轉,需編碼格式匹配。
4. 供電與功耗適配 ?
??吊艙功耗需低于無人機供電能力。例如:
??MS120吊艙載重15kg時功耗約16W,24V電壓下電流≤4.5A。
??若超負荷,遙控器觸發“電壓異常”告警。
5. 緊急功能聯動 ?
??安全機制需全鏈路貫通:
??遙控器“一鍵斷繩”指令 → 吊艙熔斷模塊3秒響應。
??跟蹤丟失時吊艙自動歸中(`setHome()`函數)。
四、 前沿趨勢:智能化與標準化
協議統一化 ?
如北約吊艙項目推動MQ-9無人機吊艙接口標準化,集成電源、導航、數據鏈于一體,降低匹配復雜度。
AI賦能控制 ?
SpireCV等庫結合深度學習,實現吊艙自動鎖定目標(如電力巡檢中的故障點),遙控器僅需監控。
超距增程技術 ?
中繼模塊將S.Bus信號與數傳電臺捆綁,使控制距離突破10公里,解決圖傳/遙控距離不匹配問題。
知識擴展:吊艙增程原理 ?
傳統遙控器距離僅1公里,但無人機數傳可達10公里以上。增程模塊將遙控器的S.Bus信號和數傳的RS-232信號編碼打包,空中端解碼后分發給吊艙,實現超視距控制。

)
和郵箱(Email)的特定彈窗)

)
)





)


)





