項目概述
在物聯網與機器人技術融合發展的今天,基于ESP32的創意項目層出不窮。今天為大家介紹一款極具創新性的ESP32-Cam三腳架機器人(Dodge),它將傳統三腳架結構與智能監控功能完美結合,通過巧妙的機械設計和開源硬件實現了靈活的移動監控能力。
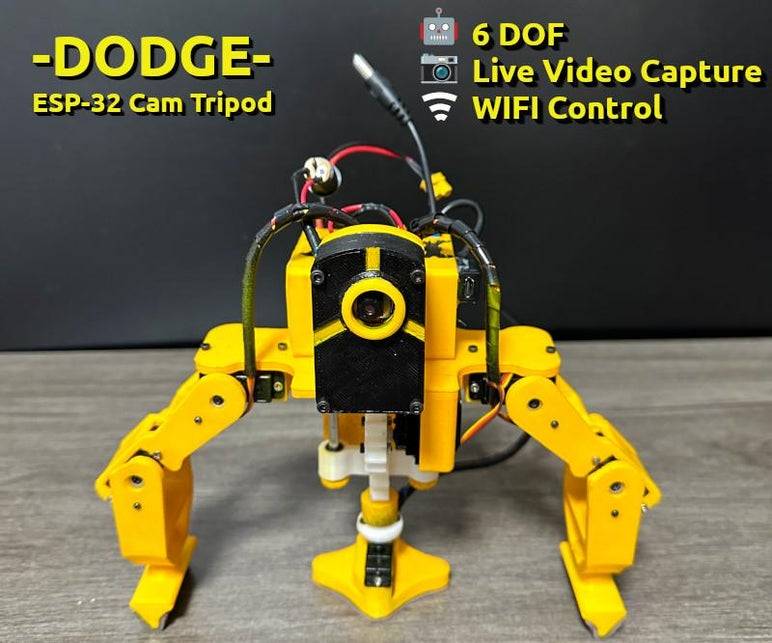
這款機器人最引人注目的是其獨特的中間支撐腿設計,配合6個數字舵機構成的關節系統,不僅實現了穩定的三足鼎立結構,還能完成360度旋轉、側向移動和高度調節等復雜動作。通過WiFi連接,用戶可在手機或電腦端實時查看攝像頭畫面并遠程控制機器人運動,堪稱"會走路的監控攝像頭"。
核心技術特點
1. 機械結構創新
- 三足鼎立設計:中間支撐腿+兩側驅動腿的布局,兼顧穩定性與靈活性
- 全舵機驅動:6個Emax ES08MDII數字舵機分別控制髖關節、膝關節和踝關節
- 模塊化組件:3D打印外殼+金屬結構件,兼顧輕量化與結構強度
2. 電子系統配置
- 主控單元:ESP32-Cam模塊,集成WiFi、藍牙和攝像頭功能
- 雙電源方案:5V主電池給ESP32供電,7.4V副電池經降壓模塊給舵機供電
- 穩定電路設計:配備1000uF和470uF電解電容,有效防止電壓波動
3. 軟件功能亮點
- 遠程監控:實時視頻傳輸,支持多設備訪問
- 動作控制:自定義路徑規劃與姿態調整
- 低功耗模式:閑置時自動進入休眠狀態,延長續航
硬件選型指南
項目的成功實現離不開合理的硬件選型,以下是核心組件清單:
| 關鍵組件 | 規格參數 | 用途說明 |
|---|---|---|
| ESP32-Cam模塊 | 帶Type-C下載板 | 主控與圖像采集核心 |
| Emax ES08MDII舵機 | 180°旋轉,0.1s/60° | 6個關節的精確控制 |
| 鋰電池 | 7.4V/800mAh + 5V/800mAh | 雙電源獨立供電系統 |
| 3A可調降壓模塊 | 輸入4-38V,輸出1.25-36V | 為舵機提供穩定電壓 |
| LM4UU直線軸承 | 4mm內徑 | 確保滑動結構順暢運行 |
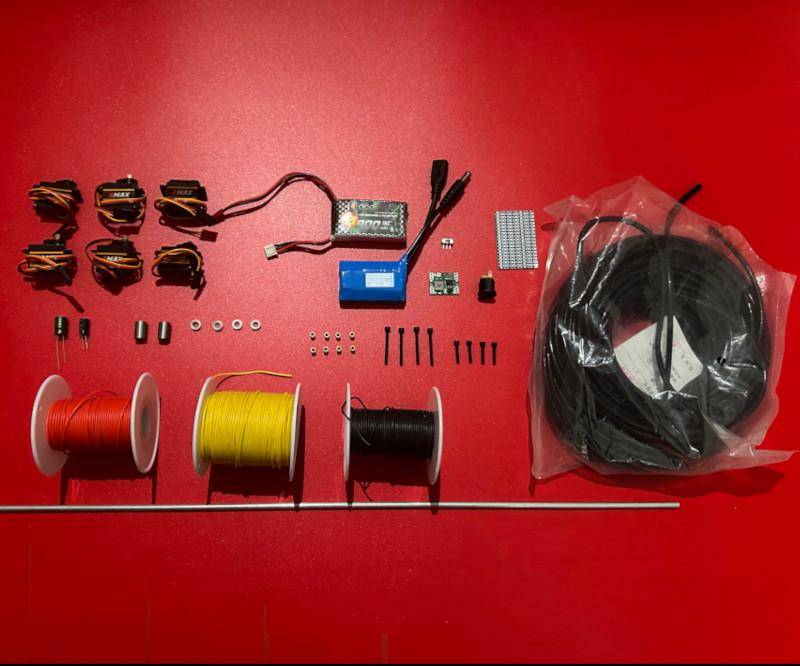
除表中核心組件外,還需要鋁棒、軸承、螺絲等機械零件,以及萬能板、電線、開關等電子元件。特別提醒:3D打印機是制作外殼和結構件的必備工具,若沒有打印條件可考慮激光切割或CNC加工替代方案。
應用場景探索
這款機器人的多功能特性使其在多個領域具有應用潛力:
- 家庭安防:自主移動監控,無死角覆蓋
- 實驗室巡檢:替代人工進行環境監測
- 智能園藝:遠程觀察植物生長狀態
- 教育平臺:機器人學與物聯網教學案例
- 創意展示:藝術裝置與互動展品
制作入門指引
對于希望動手嘗試的開發者,建議按以下步驟推進:
-
資料準備:訪問項目詳情頁獲取完整設計文件與代碼
🔗 ESP32-Cam三腳架機器人項目 -
物料采購:按材料清單備齊組件,重點關注舵機和結構件質量
-
分步實現:
- 3D打印結構件并進行機械組裝
- 焊接電路并進行供電測試
- 燒錄固件并調試通信功能
- 校準舵機參數與運動控制
-
功能擴展:可嘗試添加避障傳感器、語音控制或AI圖像識別功能
結語
ESP32-Cam三腳架機器人項目完美詮釋了"創意+技術"的融合魅力,通過開源硬件與3D打印技術,讓普通開發者也能打造出專業級的機器人作品。無論是電子愛好者、創客還是教育工作者,都能從這個項目中獲得啟發與實踐經驗。
如果你對這個項目感興趣,不妨訪問項目主頁獲取完整教程,開啟你的機器人制作之旅。對于有經驗的開發者,也歡迎參與項目優化,共同推動開源硬件生態的發展!想探索更多類似的創意項目和實戰課程?訪問IT項目網獲取豐富的技術資源與學習素材。


用法示例(C++和Python))





C++入門教程:前言——你的隨身教程和學習筆記)
重定向 | 時間相關指令 | 文件查找 | 打包與壓縮)
)



)




:自動詞 & 他動詞)