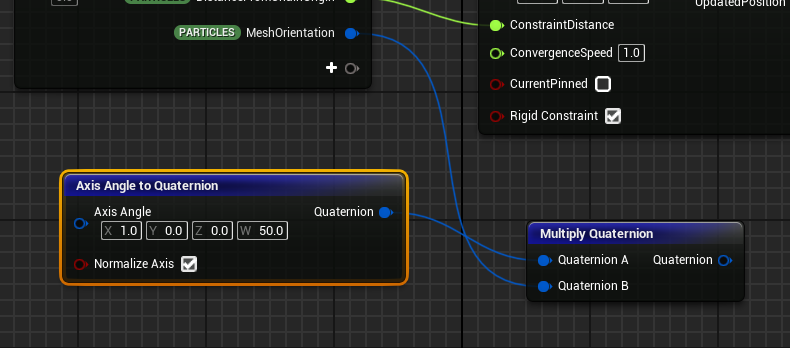
Axis Angle中,X,Y,Z分別為旋轉的軸向,W為旋轉的角度,在這里旋轉角度不需要除以2,因為里面已經除了,再將計算好的四元數與要進行旋轉的四元數進行相乘,結果就是按照原來的角度繞著某一軸向旋轉了某一角度
Axis Angle中,X,Y,Z分別為旋轉的軸向,W為旋轉的角度,在這里旋轉角度不需要除以2,因為里面已經除了,再將計算好的四元數與要進行旋轉的四元數進行相乘,結果就是按照原來的角度繞著某一軸向旋轉了某一角度
本文來自互聯網用戶投稿,該文觀點僅代表作者本人,不代表本站立場。本站僅提供信息存儲空間服務,不擁有所有權,不承擔相關法律責任。 如若轉載,請注明出處:http://www.pswp.cn/pingmian/82668.shtml 繁體地址,請注明出處:http://hk.pswp.cn/pingmian/82668.shtml 英文地址,請注明出處:http://en.pswp.cn/pingmian/82668.shtml
如若內容造成侵權/違法違規/事實不符,請聯系多彩編程網進行投訴反饋email:809451989@qq.com,一經查實,立即刪除!



)





——HTTP Server功能)
)

![[CARLA系列--03]如何打包生成CARLA 0.9.15的非編輯版(地圖的加載與卸載)](http://pic.xiahunao.cn/[CARLA系列--03]如何打包生成CARLA 0.9.15的非編輯版(地圖的加載與卸載))
)


)

