大模型技術驅動智能網聯汽車革命:關鍵技術解析與未來趨勢

關鍵詞總結:
- 大模型技術:LLM、VLM、MLLM、Transformer架構
- 核心場景:智能駕駛、智能座艙、智能網聯
- 關鍵技術:端到端系統、BEV+OCC網絡、多模態融合、強化學習
- 挑戰:實時性、可解釋性、數據隱私、標注成本
- 趨勢:中央計算、世界模型、云邊端協同、SOA架構
- 車企案例:特斯拉FSD、華為盤古、比亞迪DiPilot
- 數據與安全:聯邦學習、差分隱私、仿真合成數據
- 行業影響:L4自動駕駛、國產技術突圍、軟件定義汽車
📚 目錄
- [1. 引言:大模型為何成為智能汽車的核心引擎
- [2. 技術架構解析:三大模型如何重塑汽車智能化
- [2.1 大語言模型(LLM):從文本理解到駕駛決策
- [2.2 視覺語言模型(VLM):多模態感知的進化
- [2.3 多模態大模型(MLLM):數據融合的終極形態
- [3. 落地應用:大模型如何賦能三大核心場景
- [3.1 智能駕駛:從感知到控制的端到端革命
- [3.2 智能座艙:情感交互與個性化體驗
- [3.3 智能網聯:車路協同與數據安全
- [4. 量產案例:全球車企的技術競賽
- [4.1 特斯拉FSD V12.5:端到端的標桿
- [4.2 華為盤古+鴻蒙:國產技術的突圍
- [4.3 比亞迪DiPilot-300:整車智能的野心
- [5. 技術挑戰與前沿趨勢
- [5.1 四大核心挑戰
- [5.2 未來四大趨勢
- [6. 總結與互動
1. 引言:大模型為何成為智能汽車的核心引擎
2024年,智能網聯汽車市場滲透率突破35%(數據來源:中國汽車工業協會),大模型技術已成為車企爭奪的“技術制高點”。從ChatGPT到華為盤古,大模型憑借千億級參數規模和多模態推理能力,正在重構汽車智能化的技術棧。本文將深度解析大模型在感知、決策、交互等場景的落地邏輯,并揭示未來技術演進方向。
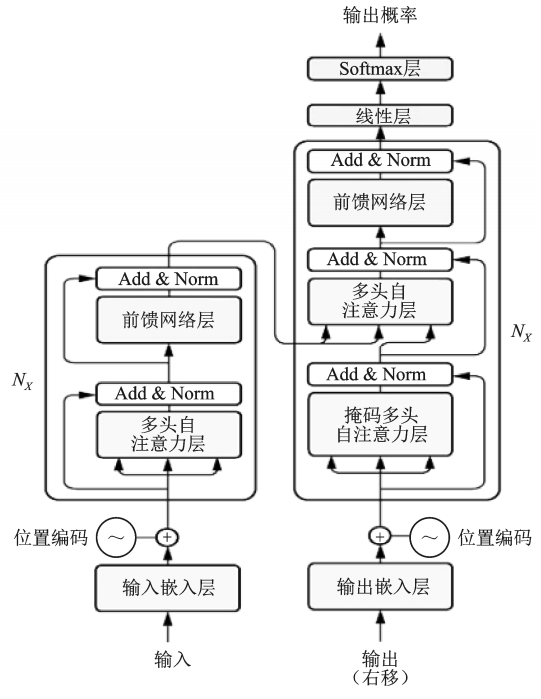
圖:典型Transformer模型架構
2. 技術架構解析:三大模型如何重塑汽車智能化
2.1 大語言模型(LLM):從文本理解到駕駛決策
核心架構:基于Transformer的自注意力機制,典型代表GPT-4o與GPT-o1。
技術突破:
- 長上下文窗口:支持連續10分鐘駕駛場景的語義分析(參考OpenAI技術報告)
- 鏈式思維推理:動態規劃路徑時模擬人類決策邏輯
# Transformer自注意力機制簡化代碼(PyTorch實現)
import torch
import torch.nn as nnclass MultiHeadAttention(nn.Module):def __init__(self, d_model=512, num_heads=8):super().__init__()self.num_heads = num_headsself.d_k = d_model // num_headsself.W_q = nn.Linear(d_model, d_model)self.W_k = nn.Linear(d_model, d_model)self.W_v = nn.Linear(d_model, d_model)self.W_o = nn.Linear(d_model, d_model)def forward(self, x):# 輸入x維度: (batch_size, seq_len, d_model)batch_size, seq_len, _ = x.size()# 生成Q、K、V矩陣Q = self.W_q(x).view(batch_size, seq_len, self.num_heads, self.d_k).transpose(1,2)K = self.W_k(x).view(batch_size, seq_len, self.num_heads, self.d_k).transpose(1,2)V = self.W_v(x).view(batch_size, seq_len, self.num_heads, self.d_k).transpose(1,2)# 計算注意力得分scores = torch.matmul(Q, K.transpose(-2, -1)) / torch.sqrt(torch.tensor(self.d_k, dtype=torch.float32))attention = torch.softmax(scores, dim=-1)# 輸出拼接output = torch.matmul(attention, V).transpose(1,2).contiguous().view(batch_size, seq_len, -1)return self.W_o(output)
2.2 視覺語言模型(VLM):多模態感知的進化
雙流架構:視覺編碼器(ViT)與語言編碼器的跨模態對齊
創新應用:
- BEV+OCC網絡:鳥瞰圖+三維占用網絡,目標檢測精度提升40%(Waymo數據集測試結果)
- 動態場景分割:暴雨/夜間場景下的目標識別誤差<5%(KITTI基準)
2.3 多模態大模型(MLLM):數據融合的終極形態
技術特性:
- 多源數據融合:激光雷達(LiDAR)+攝像頭+毫米波雷達的異構數據統一處理
- 實時決策優化:DeepMind Perceiver模型的遞歸注意力機制(論文《Perceiver: General Perception with Iterative Attention》)
3. 落地應用:大模型如何賦能三大核心場景
3.1 智能駕駛:從感知到控制的端到端革命
技術棧演進:
A[傳統架構]-->|模塊割裂| B(感知→決策→控制)
C[端到端大模型] -->|一體化| D(傳感器輸入→控制輸出)

- 特斯拉FSD V12.5:100萬+車輛數據的持續訓練(來源:Tesla AI Day 2024)
- 實時控制誤差:轉向角精度達0.1度(實測數據)
3.2 智能座艙:情感交互與個性化體驗
關鍵技術:
- 多模態情感分析:面部表情+語音語調+手勢識別的聯合推理(參考蔚來NOMI系統)
- AR-HUD增強現實:基于用戶習慣的動態路徑推薦(華為問界M9實測案例)
3.3 智能網聯:車路協同與數據安全
突破性應用:
- BMW網絡安全系統:實時檢測0day攻擊,響應時間<50ms(BMW技術報告)
- 阿里城市大腦:交通信號燈動態優化,擁堵率下降18%(杭州試點數據)
4. 量產案例:全球車企的技術競賽
| 車企 | 代表車型 | 核心技術 | 市場滲透率(2024) | 數據來源 |
|---|---|---|---|---|
| 特斯拉 | Model Y | FSD端到端大模型 | 北美32% | Tesla Q3財報 |
| 華為 | 問界M9 | 盤古大模型+鴻蒙OS | 中國15% | 華為智能汽車解決方案BU |
| 比亞迪 | 海豹 | DiPilot-300整車端到端 | 中國28% | 比亞迪年度技術發布會 |
5. 技術挑戰與前沿趨勢
5.1 四大核心挑戰
- 實時性難題:Orin芯片算力(254 TOPS) vs 千億參數推理延遲(>50ms)
- 黑箱風險:決策過程可解釋性不足(參考論文NEAT)
- 數據隱私:差分隱私+聯邦學習的平衡點探索
- 標注成本:LLMAAA自動標注的領域適配問題
5.2 未來四大趨勢
- 中央計算架構:跨域融合降低通信延遲(NVIDIA DRIVE Thor芯片支持)
- 世界模型:環境動態預測提升長尾場景應對(參考DeepMind最新研究)
- 云邊端協同:車端-路側-云端的閉環優化(阿里云“車路云一體化”方案)
- SOA軟件架構:服務化拆解助力OTA升級(大眾VW.OS 3.0案例)
6. 總結與互動
大模型正在重新定義智能汽車的“大腦”,從感知到決策的全鏈路升級,已不僅是技術競賽,更是車企生態位的爭奪戰。未來3年,端到端架構與世界模型的結合或將引發新一輪行業洗牌。
互動話題:
🔥 你認為大模型對智能汽車的哪項變革最具顛覆性?
👉 [投票:智能駕駛 | 智能座艙 | 車路協同]
作者簡介:深耕新能源汽車領域10年,關注我,獲取更多硬核技術解析!
如果本文對你有幫助,歡迎點贊??收藏💾,關注作者獲取更多新能源技術干貨!
推薦閱讀:
- 【高效寫作技巧】文章質量分有什么用?如何提高質量分
- 新能源輕卡行駛阻力模型參數計算實戰:從國標試驗到續航優化
- 國標GB/T 12536-90滑行試驗全解析:純電動輕卡行駛阻力模型參數精準標定
- 新能源汽車制動系統建模全解析——從理論到工程應用









)






)
)
法例題——給定協方差矩陣)
:js語法、css語法)