開源代碼鏈接:GitHub - Perishell/motion-planning
效果展示:
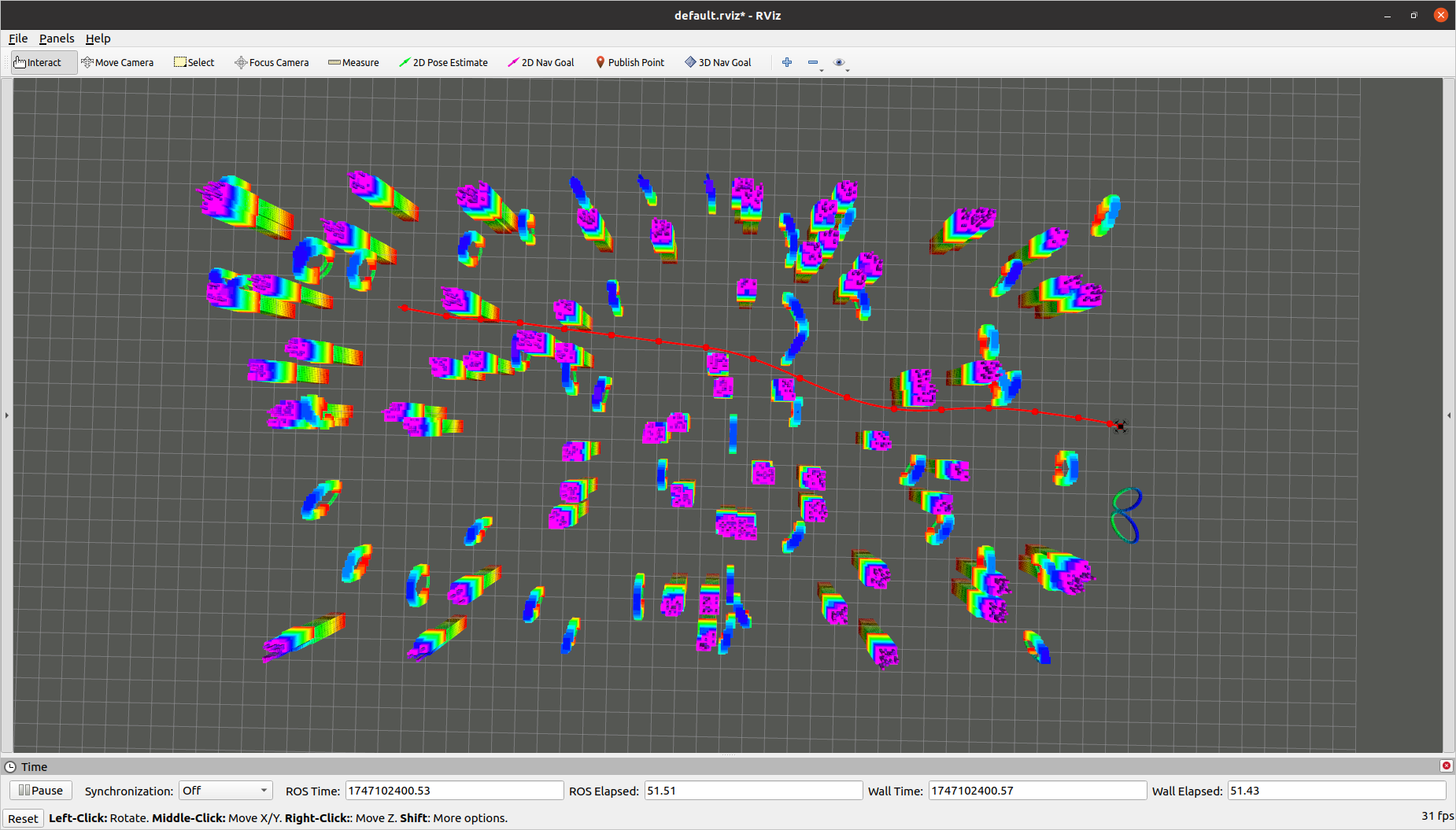
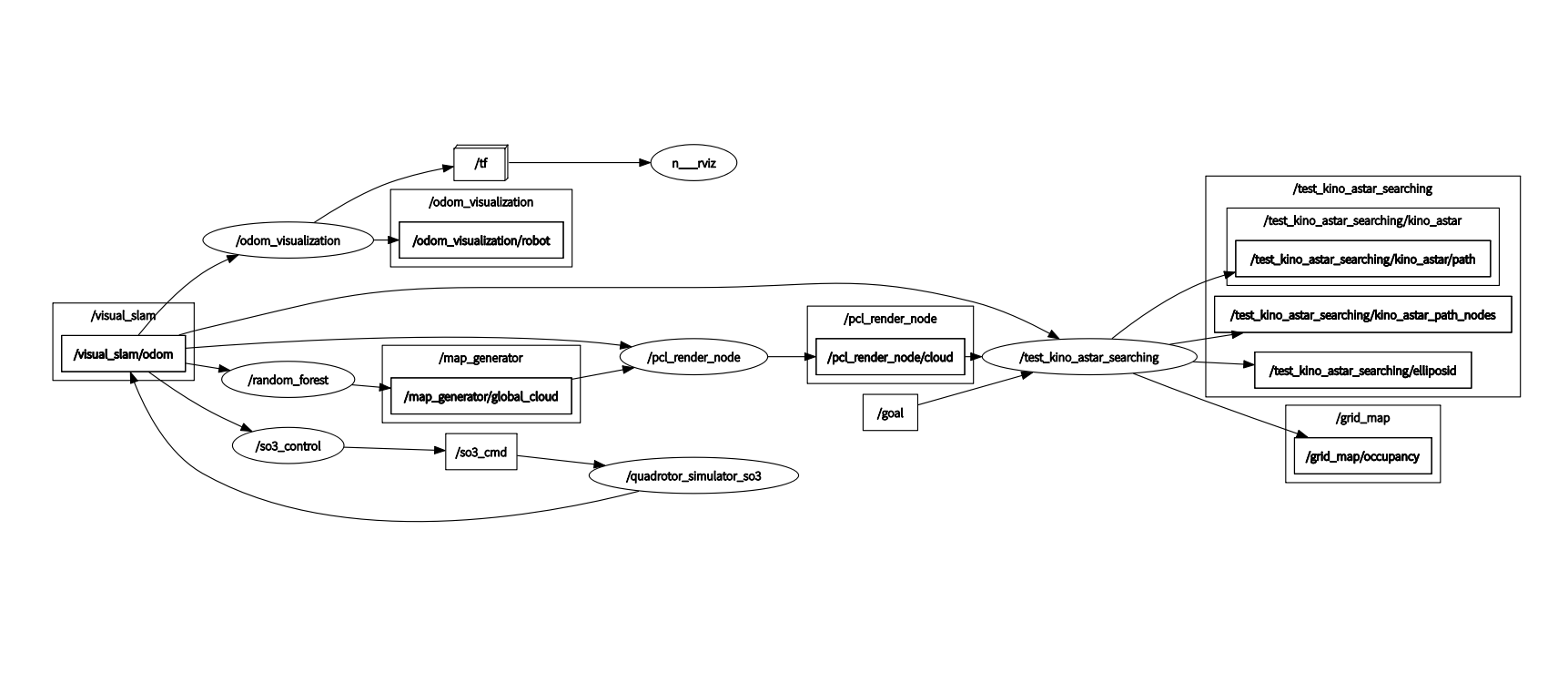
ROS 節點展示全局規劃和軌跡生成部分:
Kinodynamic A*代碼主體:
int KinoAstar::search(Eigen::Vector3d start_pt, Eigen::Vector3d start_vel,Eigen::Vector3d end_pt, Eigen::Vector3d end_vel,std::vector<Eigen::Vector3d>& path)
{// 記錄算法啟動時間,計算加速度分辨率倒數,初始化最優時間為無窮大ros::Time start_time = ros::Time::now();double inv_acc_res_ = 1.0 / acc_res_;double optimal_time = inf;// 從節點池中分配起點節點,設置位置、速度、索引、實際代價g_cost(起點到當前節點的累積代價)和綜合代價f_cost(g_cost + 啟發式代價)KinoAstarNodePtr start_node = path_node_pool_[use_node_num_];start_node->position = start_pt;start_node->velocity = start_vel;start_node->index = posToIndex(start_pt);start_node->g_cost = 0.0;start_node->f_cost = lambda_heu_ * getHeuristicCost(start_pt, start_vel, end_pt, end_vel, optimal_time);use_node_num_++;// 將起點加入優先隊列open_list_(按f_cost排序),并標記為“待擴展”open_list_.push(start_node);expanded_list_.insert(start_node->index, start_node);start_node->node_state = IN_OPEN_LIST_;std::vector<Eigen::Vector3d> path_nodes_list;while (!open_list_.empty()){// 循環處理開放列表,取出當前最優節點,移入關閉列表close_list_,標記為“已擴展”KinoAstarNodePtr current_node = open_list_.top();open_list_.pop();close_list_.insert(current_node->index, current_node);current_node->node_state = IN_CLOSE_LIST_;current_node->duration = sample_tau_;// debug// std::cout << "current_node: " << current_node->position.transpose() << std::endl;// check if near goal// 若當前節點接近終點,嘗試直接生成無碰撞的最優軌跡(如多項式插值或動力學可行路徑)if ((current_node->position - end_pt).norm() < goal_tolerance_){double tmp_cost = lambda_heu_ * getHeuristicCost(current_node->position, current_node->velocity, end_pt, end_vel, optimal_time);bool shot_path_found = computeShotTraj(current_node->position, current_node->velocity, end_pt, end_vel, optimal_time);// std::cout << "optimal_time: " << optimal_time << std::endl;if (shot_path_found){ros::Time end_time = ros::Time::now();std::cout << "kinodynamic path found, time cost: " << (end_time - start_time).toSec() << std::endl;std::cout << "use_node_num: " << use_node_num_ << std::endl;std::cout << "total_cost_J: " << current_node->g_cost + tmp_cost << std::endl;current_node->duration = optimal_time;std::vector<KinoAstarNodePtr> path_pool = retrievePath(current_node, path_nodes_list);path_nodes_list.push_back(end_pt);visPathNodes(path_nodes_list);switch (collision_check_type_){case 1: // grid map check{samplePath(path_pool, path);break;}case 2: // local cloud check{sampleEllipsoid(path_pool, path, rot_list);visEllipsoid(path, rot_list);break;} }return REACH_END;}else if (current_node->parent != NULL){// std::cout << "near end!" << std::endl;}else{std::cout << "no shot path found, end searching" << std::endl;return NO_PATH_FOUND; }// else continue; }// expand current node// (2r+1)^3 samplefor (double ax = -max_accel_; ax <= max_accel_ + 1e-3; ax += inv_acc_res_ * max_accel_)for (double ay = -max_accel_; ay <= max_accel_ + 1e-3; ay += inv_acc_res_ * max_accel_)for (double az = -max_accel_; az <= max_accel_ + 1e-3; az += inv_acc_res_ * max_accel_){Eigen::Vector3d ut;ut << ax, ay, az;Eigen::Matrix<double, 6, 1> x0;x0.head(3) = current_node->position;x0.tail(3) = current_node->velocity;Eigen::Matrix<double, 6, 1> xt;int segment_num = std::floor(sample_tau_ / step_size_);bool flag = false;bool collision_flag = false;for (int i = 0; i <= segment_num; i++){double t = i * step_size_;StateTransit(x0, xt, ut, t);Eigen::Vector3d tmp_pos = xt.head(3);// check collision and if out of mapif (grid_map_->isInMap(tmp_pos) == false){flag = true;break;}// check collisionswitch (collision_check_type_){case 1: // grid map checkif (grid_map_->getInflateOccupancy(tmp_pos) == 1){collision_flag = true;break;}case 2: // local cloud checkif (isCollisionFree(tmp_pos, ut) == false){collision_flag = true;break;}}if (collision_flag){flag = true;break;}// check velocity limitif (xt.tail(3)(0) < -max_vel_ || xt.tail(3)(0) > max_vel_ || xt.tail(3)(1) < -max_vel_ || xt.tail(3)(1) > max_vel_ || xt.tail(3)(2) < -max_vel_ || xt.tail(3)(2) > max_vel_){flag = true;break;}}if (flag) continue;StateTransit(x0, xt, ut, sample_tau_);// std::cout << "xt: " << xt.head(3).transpose() << std::endl;// std::cout << "index: " << posToIndex(xt.head(3)).transpose() << std::endl;// check if in close_list_if (close_list_.find(posToIndex(xt.head(3))) != NULL){continue;}// check if in expanded_list_else if (expanded_list_.find(posToIndex(xt.head(3))) == NULL){KinoAstarNodePtr pro_node = path_node_pool_[use_node_num_];pro_node->position = xt.head(3);pro_node->velocity = xt.tail(3);pro_node->index = posToIndex(xt.head(3));pro_node->g_cost = current_node->g_cost + (ut.dot(ut) + rou_) * sample_tau_;pro_node->f_cost = pro_node->g_cost + lambda_heu_ * getHeuristicCost(pro_node->position, pro_node->velocity, end_pt, end_vel, optimal_time);pro_node->parent = current_node;pro_node->input = ut;pro_node->duration = sample_tau_;pro_node->node_state = IN_OPEN_LIST_;use_node_num_++;open_list_.push(pro_node);expanded_list_.insert(pro_node->index, pro_node);// check if use_node_num reach the max_node_numif (use_node_num_ >= allocated_node_num_){std::cout << "reach max node num, end searching" << std::endl;return NO_PATH_FOUND;}}else{// pruning, if in same grid, check if g_cost is smaller and updatedouble tmp_g_cost = current_node->g_cost + (ut.dot(ut) + rou_) * sample_tau_;KinoAstarNodePtr old_node = expanded_list_.find(posToIndex(xt.head(3)));if (tmp_g_cost < old_node->g_cost){old_node->position = xt.head(3);old_node->velocity = xt.tail(3);// old_node->index = posToIndex(xt.head(3));old_node->g_cost = tmp_g_cost;old_node->f_cost = old_node->g_cost + lambda_heu_ * getHeuristicCost(old_node->position, old_node->velocity, end_pt, end_vel, optimal_time);old_node->parent = current_node;old_node->input = ut;}}}}std::cout << "open_list is empty, end searching, no path found" << std::endl;return NO_PATH_FOUND;
}?初始化階段:
ros::Time start_time = ros::Time::now();
double inv_acc_res_ = 1.0 / acc_res_;
double optimal_time = inf;記錄算法啟動時間,計算加速度分辨率倒數,初始化最優時間為無窮大。
起點節點初始化:
KinoAstarNodePtr start_node = path_node_pool_[use_node_num_];
start_node->position = start_pt;
start_node->velocity = start_vel;
start_node->index = posToIndex(start_pt);
start_node->g_cost = 0.0;
start_node->f_cost = lambda_heu_ * getHeuristicCost(...);
use_node_num_++;?從節點池中分配起點節點,設置位置、速度、索引、實際代價g_cost(起點到當前節點的累積代價)和綜合代價f_cost(g_cost + 啟發式代價)。
開放列表與擴展列表管理?:
open_list_.push(start_node);
expanded_list_.insert(start_node->index, start_node);
start_node->node_state = IN_OPEN_LIST_;將起點加入優先隊列open_list_(按f_cost排序),并標記為“待擴展”。
主搜索循環?:
while (!open_list_.empty()) {
KinoAstarNodePtr current_node = open_list_.top();
open_list_.pop();
close_list_.insert(current_node->index, current_node);
current_node->node_state = IN_CLOSE_LIST_;循環處理開放列表,取出當前最優節點,移入關閉列表close_list_,標記為“已擴展”。
終點檢查與軌跡優化?:
if ((current_node->position - end_pt).norm() < goal_tolerance_) {bool shot_path_found = computeShotTraj(...);if (shot_path_found) {samplePath(path_pool, path);return REACH_END;}
}若當前節點接近終點,嘗試直接生成無碰撞的最優軌跡(如多項式插值或動力學可行路徑)。
samplePath:
主體部分:
void KinoAstar::samplePath(std::vector<KinoAstarNodePtr> path_pool, std::vector<Eigen::Vector3d>& path)
{// 當路徑池中有多個節點時(非單節點情況)if (path_pool.size() != 1){// 遍歷路徑池中相鄰的節點對for (int i = 0; i < path_pool.size() - 1; i++){KinoAstarNodePtr curr_node = path_pool[i]; // 當前路徑節點KinoAstarNodePtr next_node = path_pool[i + 1]; // 下一路徑節點double curr_t = 0.0; // 當前時間戳Eigen::Matrix<double, 6, 1> x0, xt; // 狀態向量(6維:位置+速度)x0 << curr_node->position, curr_node->velocity; // 初始化當前狀態// 根據節點持續時間分割時間段(基于固定步長step_size_)int segment_num = std::floor(curr_node->duration / step_size_);// 逐時間段生成路徑點for (int j = 0; j < segment_num; j++){curr_t = j * step_size_; // 計算當前時間StateTransit(x0, xt, next_node->input, curr_t); // 狀態轉移計算(可能涉及運動學方程)[1,5](@ref)path.push_back(xt.head(3)); // 將位置信息(x,y,z)加入路徑集合}// 處理最后一個時間段(可能不完整的步長)StateTransit(x0, xt, next_node->input, curr_node->duration);// 驗證最終狀態與目標節點的位置一致性if ((xt.head(3) - next_node->position).norm() > 1e-2){std::cerr << "error in sample!" << std::endl; // 超閾值報錯}}// 處理路徑池中最后一個節點的軌跡KinoAstarNodePtr last_node = path_pool.back();double td = last_node->duration; // 獲取總持續時間Eigen::Matrix<double, 4, 1> t_vector; // 時間多項式向量(t^0, t^1, t^2, t^3)// 分割時間段生成路徑點int segment_num = std::floor(td / step_size_);double curr_t = 0.0;for (int j = 0; j <= segment_num; j++){curr_t = j * step_size_; // 當前時間戳for (int i = 0; i < 4; i++) {t_vector(i) = pow(curr_t, i); // 構建時間多項式項(如t3, t2, t, 1)}Eigen::Vector3d shot_pos = shot_coef_ * t_vector; // 通過多項式系數生成路徑點(軌跡插值)[5](@ref)path.push_back(shot_pos); // 將插值點加入路徑}}else // 當路徑池只有單個節點時的處理邏輯{KinoAstarNodePtr last_node = path_pool.back();double td = last_node->duration; // 總持續時間Eigen::Matrix<double, 4, 1> t_vector; // 同上時間多項式向量int segment_num = std::floor(td / step_size_);double curr_t = 0.0;for (int j = 0; j <= segment_num; j++) {curr_t = j * step_size_;for (int i = 0; i < 4; i++) {t_vector(i) = pow(curr_t, i);}Eigen::Vector3d shot_pos = shot_coef_ * t_vector; // 多項式軌跡生成path.push_back(shot_pos);}}
}?該函數主要用于:
- ??路徑采樣??:根據路徑池(
path_pool)中的節點,通過時間分片(step_size_)生成連續路徑點。 - ??狀態轉移??:在多節點情況下,通過
StateTransit函數計算相鄰節點間的運動狀態(可能包含速度/加速度模型) - ??軌跡插值??:在單節點或最終階段,利用四次多項式系數(
shot_coef_)生成平滑軌跡,適用于機器人/自動駕駛的運動規劃 - ??錯誤校驗??:檢查采樣結果與目標節點的位置偏差,確保路徑精度。
getHeuristicCost:
主體部分:
double KinoAstar::getHeuristicCost(Eigen::Vector3d x1, Eigen::Vector3d v1,Eigen::Vector3d x2, Eigen::Vector3d v2,double &optimal_time)
{Eigen::Vector3d dp = x2 - x1;double optimal_cost = inf;double a = -36 * dp.dot(dp);double b = 24 * dp.dot(v1 + v2);double c = -4 * (v1.dot(v1) + v1.dot(v2) + v2.dot(v2));double d = 0;double e = rou_;std::vector<double> dts = quartic(e, d, c, b, a);double T_bar = ((x1 - x2).lpNorm<Eigen::Infinity>() / max_vel_);for (int i = 0; i < dts.size(); i++){double t = dts[i];double tmp_cost = a / (-3 * t * t * t) + b / (-2 * t * t) + c / (-1 * t) + e * t;if (tmp_cost < optimal_cost && t > T_bar && tmp_cost > 0){optimal_cost = tmp_cost;optimal_time = t;}}return tie_breaker_ * optimal_cost;}?KinoAstar::getHeuristicCost?是運動規劃中結合動力學約束的啟發式函數,其核心目標是??通過最優控制理論計算從當前狀態到目標狀態的最小控制能量代價??,用于引導A*算法的搜索方向并加速收斂。以下是逐層解析:
函數參數與目標?:
- 輸入參數??:
x1/v1:起點位置和速度x2/v2:終點位置和速度optimal_time(輸出):最優時間估計
- ??輸出??:啟發式代價(預估最小控制能量)
?數學原理:最優控制問題建模?:
?該函數基于??龐特里亞金極小值原理??(Pontryagin's Minimum Principle),求解兩點邊界最優控制問題(OBVP)。目標是最小化控制能量(如加加速度的積分),同時滿足位置和速度的終點約束。
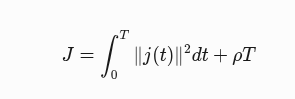
其中:
- j(t)?是加加速度(控制輸入)
- ρ?是時間權重(對應代碼中的?
rou_)
通過狀態方程和協態方程推導,最終得到關于時間?T?的??四次多項式方程??,其根對應可能的極值點。
代碼實現步驟?:
-
構造四次方程系數??:
- 計算位置差?
dp = x2 - x1 - 根據幾何關系和控制能量積分,生成系數?
a, b, c, d, e(對應四次方程?aT^4+bT^3+cT^2+d^T+e=0)
- 計算位置差?
-
??求解方程根??:
- 調用?
quartic(e, d, c, b, a)?解四次方程,得到候選時間解?dts。
- 調用?
-
??篩選最優時間與代價??:
- 計算時間下限?
T_bar(確保速度不超過最大值?max_vel_) - 遍歷所有候選時間?
t,計算對應的能量代價?tmp_cost,篩選滿足?t>T_bar?的最小代價?optimal_cost?及對應時間?optimal_time。
- 計算時間下限?
-
??返回加權代價??:
- 最終代價乘以?
tie_breaker_(通常略大于1的系數,避免路徑重復擴展)
- 最終代價乘以?
computeShotTraj:
主體部分:
bool KinoAstar::computeShotTraj(Eigen::Vector3d x1, Eigen::Vector3d v1,Eigen::Vector3d x2, Eigen::Vector3d v2,double optimal_time)
{double td = optimal_time;Eigen::Vector3d dp = x2 - x1;Eigen::Vector3d dv = v2 - v1;shot_coef_.col(0) = x1;shot_coef_.col(1) = v1;shot_coef_.col(2) = 0.5 * (6 / (td * td) * (dp - v1 * td) - 2 * dv / td);shot_coef_.col(3) = 1.0 / 6.0 * (-12 / (td * td *td) * (dp - v1 * td) + 6 * dv / (td * td));Eigen::Matrix<double, 4, 4> Transit_v;Transit_v << 0, 0, 0, 0, 1, 0, 0, 0,0, 2, 0, 0, 0, 0, 3, 0;Eigen::Matrix<double, 4, 4> Transit_a;Transit_a << 0, 0, 0, 0, 1, 0, 0, 0,0, 2, 0, 0, 0, 0, 0, 0;vel_coef_ = shot_coef_ * Transit_v;acc_coef_ = vel_coef_ * Transit_a;Eigen::Matrix<double, 4, 1> t_vector;int segment_num = std::floor(td / step_size_);double curr_t = 0.0;for (int j = 0; j <= segment_num; j++){curr_t = j * step_size_;for (int i = 0; i < 4; i++){t_vector(i) = pow(curr_t, i);}Eigen::Vector3d shot_pos = shot_coef_ * t_vector;Eigen::Vector3d shot_vel = vel_coef_ * t_vector;Eigen::Vector3d shot_acc = acc_coef_ * t_vector;// check collisionif (grid_map_->getInflateOccupancy(shot_pos)){return false;}// only check collision, vel and acc limit by limit T_// // check velocity limit// if (shot_vel(0) > max_vel_ || shot_vel(0) < -max_vel_ || // shot_vel(1) > max_vel_ || shot_vel(1) < -max_vel_ || // shot_vel(2) > max_vel_ || shot_vel(2) < -max_vel_)// {// return false;// }// // check acceleration limit// if (shot_acc(0) > max_accel_ || shot_acc(0) < -max_accel_ || // shot_acc(1) > max_accel_ || shot_acc(1) < -max_accel_ || // shot_acc(2) > max_accel_ || shot_acc(2) < -max_accel_)// {// return false;// }}return true;
}?定義了一個函數computeShotTraj,屬于類KinoAstar:
bool KinoAstar::computeShotTraj(Eigen::Vector3d x1, Eigen::Vector3d v1,Eigen::Vector3d x2, Eigen::Vector3d v2,double optimal_time)?該函數用于計算一步到位的航跡,參數包括初始位置x1、初始速度v1、目標位置x2、目標速度v2,以及最優時間optimal_time,返回值為布爾類型。
double td = optimal_time;將optimal_time賦值給變量td,表示軌跡的時間長度。
Eigen::Vector3d dp = x2 - x1;
Eigen::Vector3d dv = v2 - v1;計算位置差和速度差。
shot_coef_.col(0) = x1;
shot_coef_.col(1) = v1;
shot_coef_.col(2) = 0.5 * (6 / (td * td) * (dp - v1 * td) - 2 * dv / td);
shot_coef_.col(3) = 1.0 / 6.0 * (-12 / (td * td *td) * (dp - v1 * td) + 6 * dv / (td * td));?將初始位置x1和初始速度v1賦值給shot_coef_的第一列和第二列,shot_coef_是一個用于存儲三次多項式系數的矩陣。計算三次多項式的第二項系數,涉及位置差dp、初始速度v1、速度差dv,以及時間td的計算。
Eigen::Matrix<double, 4, 4> Transit_v;Transit_v << 0, 0, 0, 0, 1, 0, 0, 0,0, 2, 0, 0, 0, 0, 3, 0;Eigen::Matrix<double, 4, 4> Transit_a;Transit_a << 0, 0, 0, 0, 1, 0, 0, 0,0, 2, 0, 0, 0, 0, 0, 0;定義一個4x4的矩陣Transit_v,用于將位置系數轉換為速度系數。矩陣的結構是根據速度的導數特性定義的。定義一個4x4的矩陣Transit_a,用于將速度系數轉換為加速度系數。矩陣的結構是根據加速度的導數特性定義的。
vel_coef_ = shot_coef_ * Transit_v;
acc_coef_ = vel_coef_ * Transit_a;
通過shot_coef_和Transit_v的矩陣乘法,計算出速度系數矩陣vel_coef_。?通過vel_coef_和Transit_a的矩陣乘法,計算出加速度系數矩陣acc_coef_。
Eigen::Matrix<double, 4, 1> t_vector;
int segment_num = std::floor(td / step_size_);
double curr_t = 0.0;
for (int j = 0; j <= segment_num; j++){curr_t = j * step_size_;for (int i = 0; i < 4; i++){t_vector(i) = pow(curr_t, i);}Eigen::Vector3d shot_pos = shot_coef_ * t_vector;Eigen::Vector3d shot_vel = vel_coef_ * t_vector;Eigen::Vector3d shot_acc = acc_coef_ * t_vector;// check collisionif (grid_map_->getInflateOccupancy(shot_pos)){return false;}?定義一個4x1的矩陣t_vector,用于存儲時間的冪次計算。計算時間分割數segment_num,即時間td除以步長step_size_并向下取整。循環遍歷時間分割點,從0到segment_num。計算當前時間curr_t,即j乘以步長step_size_。通過shot_coef_和t_vector的矩陣乘法,計算出當前位置shot_pos。通過vel_coef_和t_vector的矩陣乘法,計算出當前速度shot_vel。通過acc_coef_和t_vector的矩陣乘法,計算出當前加速度shot_acc。檢查當前位置shot_pos是否與網格地圖中的膨脹障礙物發生碰撞。如果發生碰撞,返回false,表示軌跡不可行。
retrievePath:
主體部分:
std::vector<KinoAstarNodePtr> KinoAstar::retrievePath(KinoAstarNodePtr end_node, std::vector<Eigen::Vector3d>& path_nodes_list)
{KinoAstarNodePtr current_node = end_node;std::vector<KinoAstarNodePtr> path_nodes;while (current_node->parent != NULL){path_nodes.push_back(current_node);path_nodes_list.push_back(current_node->position);current_node = current_node->parent;}path_nodes.push_back(current_node);path_nodes_list.push_back(current_node->position);std::reverse(path_nodes.begin(), path_nodes.end());std::reverse(path_nodes_list.begin(), path_nodes_list.end());return path_nodes;
}std::vector<KinoAstarNodePtr> path_pool = retrievePath(current_node, path_nodes_list);這段代碼定義了一個函數 retrievePath,屬于類 KinoAstar,用于從終點節點回溯并提取出路徑上的所有節點以及它們的位置,形成完整的路徑。
- 路徑回溯:從終點節點開始,通過每個節點的
parent指針逐級向上訪問,直到找到起點(即parent為NULL的節點)。 - 路徑構建:在回溯過程中,將每個節點及其位置分別添加到
path_nodes和path_nodes_list中。 - 順序調整:由于回溯得到的路徑是從終點到起點的順序,使用
std::reverse將兩個向量反轉,最終得到從起點到終點的正確路徑順序。
?節點擴展與狀態轉移:
for (double ax = -max_accel_; ...) {Eigen::Vector3d ut(ax, ay, az);StateTransit(x0, xt, ut, sample_tau_);// 碰撞檢測與速度限制檢查
}?功能??:遍歷所有可能的加速度控制輸入(三維離散化),生成子節點狀態
- 關鍵點??:
- ??狀態轉移方程??:
StateTransit根據動力學模型(如勻加速運動學)計算下一時刻狀態 - ??碰撞檢測??:分段檢查軌跡段是否在自由空間內(
grid_map_或點云檢測)
- ??狀態轉移方程??:
StateTransit:?
主體部分:
void KinoAstar::StateTransit(Eigen::Matrix<double, 6, 1> &x0, Eigen::Matrix<double, 6, 1> &xt,Eigen::Vector3d ut, double t)
{// 初始化6x6狀態轉移矩陣e_At為單位矩陣(初始狀態下時間t=0時的狀態轉移)Eigen::Matrix<double, 6, 6> e_At = Eigen::Matrix<double, 6, 6>::Identity();// 前三行的位置-速度關系處理:位置 += 速度 * 時間t(例如x = x0 + vx*t)for (int i = 0; i < 3; i++) {e_At(i, 3 + i) = t; // 例如e_At矩陣第0行第3列設為t,對應x方向的位置增量}// 初始化6x3的積分矩陣(用于控制輸入ut對狀態的影響)Eigen::Matrix<double, 6, 3> Integral = Eigen::Matrix<double, 6, 3>::Zero();// 填充積分矩陣:// 前三行對角線元素為0.5*t2(加速度對位置的影響,如Δx = 0.5*a*t2)// 后三行對角線元素為t(加速度對速度的影響,如Δv = a*t)for (int i = 0; i < 6; i++) {if (i < 3) Integral(i, i) = 0.5 * t * t; // 位置積分項else Integral(i, i - 3) = t; // 速度積分項}// 狀態轉移方程:xt = e_At * x0 + Integral * ut// 其中:// - e_At * x0 表示初始狀態的線性傳播(位置+速度)// - Integral * ut 表示控制輸入(如加速度)對狀態的影響xt = e_At * x0 + Integral * ut;
}功能總結:
-
??狀態轉移模型??
基于線性運動學模型,通過矩陣運算實現狀態預測。假設系統為二階模型(包含位置和速度),控制輸入ut可能對應加速度 -
??矩陣作用??
- ??e_At??:6x6矩陣,描述位置和速度隨時間變化的線性關系(如勻速運動模型)。
- ??Integral??:6x3矩陣,計算控制輸入對狀態的積分貢獻(如勻加速運動中的位移和速度變化)
-
??物理意義??
假設系統狀態為[x, y, z, vx, vy, vz],控制輸入為加速度[ax, ay, az],則:- 位置更新:
x_new = x0 + vx*t + 0.5*ax*t2 - 速度更新:
vx_new = vx + ax*t
- 位置更新:


)

、date_add()、datediff() 詳解-文中有示例幫助理解)






)







