1、程序載圖1
2、程序截圖2
3、程序解釋
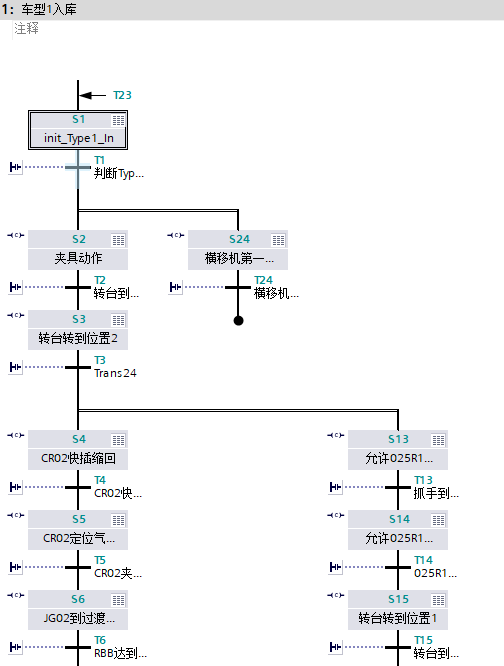
這是一個基于西門子 GRAPH 編程的車型 1 入庫順序控制流程圖,通過狀態機結構(狀態框?S?與轉移條件?T)描述完整工作流程,具體如下:
整體流程概述
- 初始化:從?S1(init_Type1_In)?開始,初始化車型 1 入庫流程。
- 分支判斷:經?T1(判斷 Typ...)?后流程分為兩支,分別處理不同裝置動作,最終匯合至入庫完成。
左側流程(以 JG02 為主)
- S2(夾具動作):執行夾具操作,完成后經?T2?觸發?S3(轉臺轉到位置 2)。
- S3:轉臺移至位置 2,通過?T3(Trans24)?推進。
- S4(CRO2 快插縮回)→S5(CRO2 定位氣...)→S6(JG02 到過渡...):CRO2 執行縮回、定位動作,JG02 移動到過渡位置,依次由?T4、T5、T6(RB 達到...)?觸發。
- S7(JG02 到過渡...)→S8(JG02 到橫移...):JG02 繼續移動,由?T7(JG02 達...)、T8(JG02 到...)?控制。
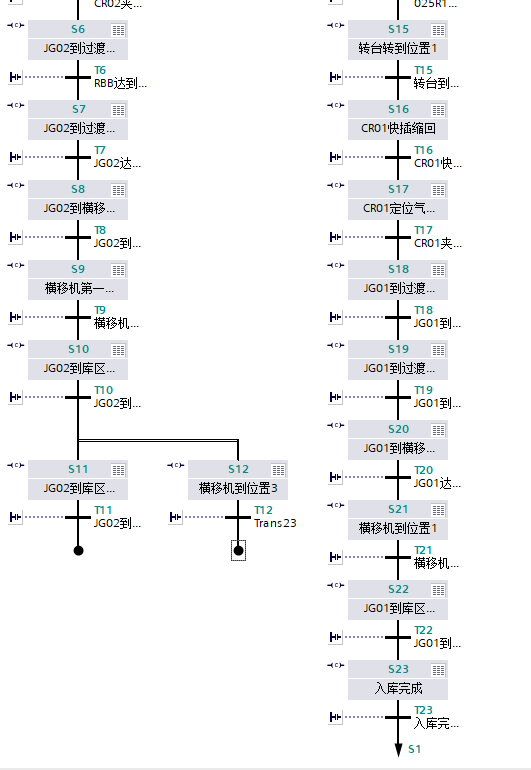
- S9(橫移機第一...)→S10(JG02 到庫區...)→S11(JG02 到庫區...):橫移機動作,JG02 進入庫區,由?T9(橫移機...)、T10(JG02 到...)、T11(JG02 到...)?推進。
右側流程(以 CR01、JG01 為主)
- S24(橫移機第一...):橫移機第一步操作,經?T24?后,與左側流程協同。
- S13(允許 025R1...)→S14(允許 025R1...):允許相關操作,由?T13(抓手到...)、T14?觸發。
- S15(轉臺轉到位置 1):轉臺移回位置 1(T15?觸發),隨后?S16(CR01 快插縮回)→S17(CR01 定位氣...)→S18(CR01 夾...):CR01 執行縮回、定位、夾持動作,由?T16(CR01 快...)、T17?控制。
- S19(JG01 到過渡...)→S20(JG01 到橫移...):JG01 移動,由?T18(JG01 到...)、T19(JG01 到...)、T20(JG01 達...)?觸發。
- S21(橫移機到位置 1)→S22(JG01 到庫區...):橫移機到位,JG01 進入庫區(T21(橫移機...)、T22(JG01 到...))。
流程結束
最終通過?S23(入庫完成),由?T23(入庫完...)?確認后,流程回到?S1,可重新初始化下一次入庫操作。
該流程圖通過狀態與轉移條件的有序組合,精準控制夾具、轉臺、橫移機、CRO2、JG01/JG02 等裝置的協同動作,確保車型 1 入庫流程按順序、高效執行,體現了 GRAPH 編程在工業自動化順序控制中的應用特點。





如何調試HardFault)










-HIVE中的窗口函數)


)